技术特征:
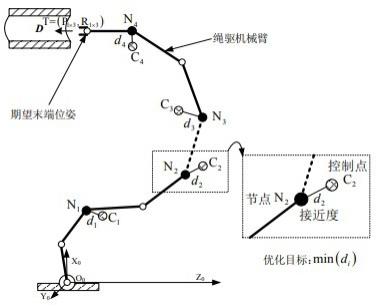
1.一种求解绳驱机械臂逆运动学的协同规划方法,包括以下步骤:步骤一,在绳驱机械臂的末端执行器和中间关节设定i个被控制点,对应的在空间设置i个控制点;步骤二,根据绳驱机械臂的特点将被控制点设定为绳驱机械臂上每n个自由度之间的节点,被控制点与相应控制点之间的“接近度”则为待优化目标;步骤三,判断任意欧式距离是否大于对应安全阈值,若判断结果为是,则通过基于梯度投影法的全局优化使得欧式距离逼近零,从而得到绳驱机械臂在空间的期望构型;步骤四,判断任意欧式距离是否为零,若判断结果为是,表示绳驱机械臂的构型与期望构型完全一致;步骤五,判断任意欧式距离是否为零,若判断结果为否,则通过优化绳驱机械臂的整臂自由度,使得接近度的加权和最小,即绳驱机械臂的整臂构型与控制点所设定构型的一致性达到最优化状态,实现“整臂构型-末端位姿”协同规划目标。2.根据权利要求1所述的求解绳驱机械臂逆运动学的协同规划方法,其特征在于:对于被控制点的选择,充分利用绳驱机械臂自由度的冗余性,将每n个自由度之间的关节节点设定为绳驱机械臂的被控点;对于控制点的选择,为了能够实现按照操作人员灵活调整绳驱机械臂中间构型的目标,提出基于变控制点的绳驱机械臂轨迹规划,以“按需”抓取点的方式获取控制点在空间的位置坐标,在算法中通过坐标转换的方式将抓取点投影到经典d-h(denavit-hartenberg)坐标系的yz面,垂足和圆心的连线与控制圆的交点即为控制点。3.根据权利要求1至2任一项所述的求解绳驱机械臂逆运动学的协同规划方法,其特征在于:应用梯度投影法解决绳驱机械臂的空间构型在当前关节空间的某一组合下沿着哪一个方向有最大的自运动变化率的问题,优化绳驱机械臂的关节构型,同时优化绳驱机械臂关节角的角速度。建立关节空间与任务空间的映射雅克比(jacobian)矩阵,输入已知条件:1)绳驱机械臂末端执行器在任务空间的期望位姿;2)当前关节角度;3)d-h坐标系参数;4)控制点的期望位置;进一步计算当前位姿差,利用雅克比矩阵,通过梯度投影法得到位姿差与关节变量之间的关系,计算绳驱机械臂关节新的输入,进行绳驱机械臂的运动控制,实现绳驱机械臂的运动。4.根据权利要求1至3所述的求解绳驱机械臂逆运动学的协同规划方法,其特征在于:通过调整改进对应参数实现所述绳驱机械臂的“整臂构型-末端位姿”协同规划处理;所述协同规划参数包括整臂构型参数与末端位姿参数。5.一种求解绳驱机械臂逆运动学的协同规划系统,其特征在于,包括:位置选择单元:用于根据作业需求获取控制点在空间的位置坐标;位置检测单元:用于检测绳驱机械臂当前构型,以计算计算控制点和被控制点之间的欧几里得距离;
位置判定单元:用于判定欧式距离是否大于对应安全阈值,判定控制点和被控制点之间的欧式距离是否为零;规划单元:用于计算当前位姿差,利用雅克比矩阵,通过梯度投影法得到位姿差与关节变量之间的关系,计算绳驱机械臂关节新的输入,进行绳驱机械臂的运动控制;输入单元:用于输入规划完成的关节构型与绳驱机械臂关节角的角速度到绳驱机械臂,实现绳驱机械臂的运动。6.根据权利要求5所述的求解绳驱机械臂逆运动学的协同规划系统,其特征在于:通过调整改进对应参数实现所述绳驱机械臂的协同规划处理;所述协同规划参数包括整臂构型参数与末端位姿参数。7.一种计算机存储介质,其特征在于,其上存储有计算机程序,所述程序被处理器执行时实现以下步骤:步骤一,在绳驱机械臂的末端执行器和中间关节设定i个被控制点,对应的在空间设置i个控制点;步骤二,根据绳驱机械臂的特点将被控制点设定为绳驱机械臂上每n个自由度之间的节点,被控制点与相应控制点之间的“接近度”则为待优化目标;步骤三,判断任意欧式距离是否大于对应安全阈值,若判断结果为是,则通过基于梯度投影法的全局优化使得欧式距离逼近零,从而得到绳驱机械臂在空间的期望构型;步骤四,判断任意欧式距离是否为零,若判断结果为是,表示绳驱机械臂的构型与期望构型完全一致;步骤五,判断任意欧式距离是否为零,若判断结果为否,则通过优化绳驱机械臂的整臂自由度,使得接近度的加权和最小,即绳驱机械臂的整臂构型与控制点所设定构型的一致性达到最优化状态,实现“整臂构型-末端位姿”协同规划目标。
技术总结
本发明公开了一种求解绳驱机械臂逆运动学的协同规划方法及系统、计算机存储介质,其中方法如下:选取绳驱机械臂的末端点和部分中间关节的交点作为被控制点;在被控制点附近则自由设定对应的控制点;计算控制点和被控制点之间的欧几里得距离(欧式距离);结合梯度投影法,将计算得到的欧式距离作为优化目标函数,通过调整控制点及比例因子等参数则可以在绳驱机械臂自运动空间内完成整臂构型的调整。规划方式为:当任意欧式距离大于对应安全阈值时,则通过基于梯度投影法的全局优化使得欧式距离逼近零,从而优化绳驱机械臂的整臂自由度,使得绳驱机械臂的整臂构型与控制点所设定构型的一致性达到最优化状态,实现“整臂构型-末端位姿”协同规划目标。协同规划目标。协同规划目标。
技术研发人员:牟宗高 高玉明 张鲁杨 刘力源 吕浩 杨盼盼 董瑞春 程祥
受保护的技术使用者:山东理工大学
技术研发日:2022.11.15
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。