1.本技术涉及清洁设备技术领域,尤其涉及一种清洁装置。
背景技术:
2.随着人们生活水平的提高和技术的发展,市场上出现了越来越多能够实现扫地、拖地的清洁装置。清洁装置包括清洁机器人和基座,清洁机器人通常通过驱使其滚刷转动,以收集地面上的杂物,并将收集的杂物吸入清洁机器人上的垃圾收纳盒,从而完成地面清理的功能。
3.目前市场上的清洁类机器人都存在清洁滚刷易缠毛发的问题,而清洁滚刷毛发的常规手段为人工拆除滚刷,再用割刀手动清理,此种方法费时费力,使得缠绕在滚刷上的毛发很难被及时清理干净。而当滚刷上缠绕的毛发得不到及时的清理时,会产生漏扫、漏拖等导致清洁机器人的清洁功能降低的现象,降低清洁效率和清洁效果。
技术实现要素:
4.基于此,本发明有必要提供一种清洁装置,以实现自动切割清理清洁机器人滚刷上缠绕的毛发。
5.一种清洁装置,包括清洁机器人和基座,所述清洁机器人包括滚刷组件和第一驱动器,所述滚刷组件与所述第一驱动器连接,所述滚刷组件包括转轴和拖布,所述转轴的外周沿第一方向开设有切割槽,所述拖布包裹于所述转轴的外周,所述拖布在所述切割槽处设有沿所述转轴的周向分离的第一端部和第二端部;所述基座包括切割组件,所述切割组件包括第二驱动器和割刀,所述基座上具有容纳所述清洁机器人的容置空间;其中,当所述清洁机器人置于所述容置空间时,所述第一驱动器驱使所述滚刷组件转动至第一位置,所述切割槽与所述割刀对位,所述第二驱动器驱使所述割刀伸入所述切割槽,并控制所述割刀沿所述第一方向移动,所述第一方向与所述转轴的轴线方向平行。
6.上述的清洁装置,通过在滚刷组件的转轴外周开设切割槽,使得转轴在切割槽的槽口处断开,当清洁机器人工作时,第一驱动器驱使转轴旋转清洁,缠绕在拖布上的毛发会在切割槽的槽口处架空。此外,当清洁机器人完成清洁返回基座上的容置空间后,第一驱动器驱使转轴转动至第一位置,第二驱动器先驱使割刀伸入切割槽,再驱使割刀沿第一方向移动,将在位于切割槽的槽口处的毛发切断,实现自动切割清理清洁机器人滚刷组件上缠绕毛发的功能,有利于提升清洁装置的清洁效率和清洁效果。
7.在其中一个实施例中,所述滚刷组件还包括拖布,所述拖布包裹于所述转轴的外周,所述拖布在所述切割槽处设有分离的第一端部和第二端部,所述切割槽在所述第一方向上的长度h1不小于所述拖布在所述第一方向上的长度h2。
8.在其中一个实施例中,所述滚刷组件还包括压板,所述第一端部和所述第二端部背离所述转轴的一侧均盖设有所述压板,所述压板连接于所述切割槽的侧壁。
9.在其中一个实施例中,所述清洁机器人还包括底壳,所述滚刷组件和所述第一驱
动器连接于所述底壳,所述滚刷组件背离所述第一驱动器的一端设有感应片,所述底壳上靠近所述感应片的部位设有感应器,所述感应器用于检测所述感应片的位置。
10.在其中一个实施例中,所述感应片上设有缺口,所述感应器为光电开关。
11.在其中一个实施例中,所述切割组件还包括丝杠和螺母,所述丝杠穿设于所述螺母,并与所述第一方向平行,所述割刀连接于所述螺母,所述第二驱动器连接于所述丝杠的一端,并用于驱使所述丝杠转动。
12.在其中一个实施例中,所述切割组件还包括导向轴、滑动轴承、以及轴承座,所述导向轴穿设于所述滑动轴承,并与所述第一方向平行,所述滑动轴承安装在所述轴承座内,所述割刀连接于所述轴承座。
13.在其中一个实施例中,所述切割组件还包括刀座,所述刀座连接于所述轴承座和所述割刀之间。
14.在其中一个实施例中,所述切割组件还包括至少两个轴承盖,所述丝杠的两端各安装有一个滚动轴承,两个所述轴承盖用于将所述导向轴的两端和两个所述滚动轴承相背离的两端压紧。
15.在其中一个实施例中,所述切割组件还包括联轴器,所述联轴器连接于所述丝杠的一端和所述第二驱动器之间。
16.在其中一个实施例中,所述基座还包括底座,所述导向轴、所述第二驱动器、所述滚动轴承、以及所述丝杠背离所述第二驱动器的一端均连接在所述底座上。
附图说明
17.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
19.图1为本技术实施例提供的一种清洁装置的整体结构示意图;
20.图2为本技术实施例所述的清洁机器人的部分结构剖视图;
21.图3为图2中圈a的放大示意图;
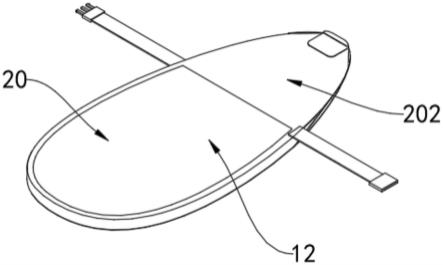
22.图4为本技术实施例所述的拖布上缠绕有毛发的部分滚刷组件的结构正视图;
23.图5为图4中拖布上缠绕有毛发的部分滚刷组件的结构侧视图;
24.图6为本技术实施例所述的基座的部分结构示意图;
25.图7为本技术实施例所述的基座的部分结构剖视图;
26.图8为本技术实施例所述的清洁装置的部分结构剖视图;
27.图9为本技术实施例所述的清洁装置的部分结构剖视图。
28.附图标记说明
29.10、清洁装置;20、毛发;100、清洁机器人;110、滚刷组件;111、转轴;1111、切割槽;112、拖布;1121、第一端部;1122、第二端部;113、压板;120、第一驱动器;130、底壳;131、感应器;140、感应片;200、基座;210、切割组件;2111、割刀;2112、刀座;212、第二驱动器;213、丝杠;214、螺母;215、导向轴;216、滑动轴承;217、轴承座;218、轴承盖;219、联轴器;220、底
座;230、滚动轴承。
具体实施方式
30.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
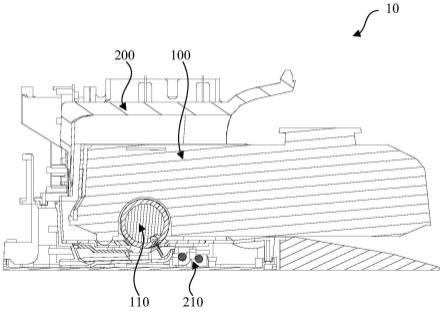
31.如图1-图9所示,本技术提供一种清洁装置10,包括清洁机器人100和基座200。清洁机器人100包括滚刷组件110和第一驱动器120。滚刷组件110与第一驱动器120连接。滚刷组件110包括转轴111和拖布112。转轴111的外周沿第一方向(如图4中s箭头所指任一方向)开设有切割槽1111。拖布112包裹于转轴111的外周。拖布112在切割槽1111处设有沿转轴111的周向分离的第一端部1121和第二端部1122。基座200包括切割组件210。切割组件210包括第二驱动器212和割刀2111。基座200上具有容纳清洁机器人100的容置空间(图未标)。其中,当清洁机器人100置于容置空间时,第一驱动器120驱使滚刷组件110转动至第一位置,切割槽1111与割刀2111对位,第二驱动器212驱使割刀2111伸入切割槽1111,并控制割刀2111沿第一方向移动。上述的第一方向与转轴111的轴线方向平行。
32.由此可知,上述的清洁装置10,通过在滚刷组件110的转轴111外周开设切割槽1111,使得转轴111在切割槽1111的槽口处断开,当清洁机器人100工作时,第一驱动器120驱使转轴111旋转清洁,缠绕在拖布112上的毛发20会在切割槽1111的槽口处架空。此外,当清洁机器人100完成清洁返回基座200后,第一驱动器120驱使转轴111转动至第一位置时,第二驱动器212先驱使割刀2111伸入切割槽1111,再驱使割刀2111沿第一方向移动,将在位于切割槽1111的槽口处的毛发20切断,实现自动切割清理清洁机器人100滚刷组件110上缠绕毛发20的功能,有利于提升清洁装置10的清洁效率和清洁效果。
33.需要说明的是,上述:当第一驱动器120驱使滚刷组件110转动至第一位置时,切割槽1111与割刀2111“对位”,可以理解为:当滚刷组件110在第一驱动器120的驱使下转动至第一位置时,“切割槽1111的槽口方向与割刀2111的刀刃方向相对”,割刀2111能够在第二驱动器212的驱使下伸入切割槽1111,并能够在第二驱动器212的驱使下沿第一方向移动。
34.还需要说明的是,本技术中的基座200具有综合功能,可以为清洁机器人100充电,也具有为清洁机器人100补充清水、回收污水等功能。
35.进一步地,如图3所示,切割槽1111在第一方向上的长度h1不小于拖布112在第一方向上的长度h2。由于在清洁过程中,拖布112直接与被清洁面(常为地面)接触,毛发20常直接缠绕在拖布112上。因此,第二驱动器212驱使割刀2111沿第一方向在切割槽1111内移动的过程中,能够将缠绕在拖布112上且位于切割槽1111的槽口处的毛发20全部切断,有利于提升清理毛发20的效率,避免拖布112上有遗漏的情况发生。
36.具体地,在本实施例中,切割槽1111在第一方向上的长度h1与拖布112在第一方向上的长度h2相等。
37.此外,切割槽1111两侧壁之间的宽度应大于割刀2111的厚度,以供割刀2111进入切割槽1111。
38.在一个实施例中,如图5所示,滚刷组件110还包括压板113。第一端部1121和第二
端部1122背离转轴111的一侧均盖设有压板113。压板113连接于切割槽1111的侧壁。因此,两个压板113能够分别将拖布112上相分离的两个端部压紧在转轴111上,以防止拖布112翘边。
39.需要说明的是,压板113可以为多个,也可以为一个。当压板113为多个时,多个压板可以分离设置。具体地,在本实施例中,压板113的数量为两个。两个压板113分离设置,且分别盖设于第一端部1121和第二端部1122。
40.设有压板113时,两压板113之间的间隔宽度也应大于割刀2111的厚度,以供割刀2111进入切割槽1111。
41.在一个实施例中,如图6和图7所示,清洁机器人100还包括底壳130。滚刷组件110和第一驱动器120连接于底壳130。滚刷组件110背离第一驱动器120的一端设有感应片140。底壳130上靠近感应片140的部位设有感应器131。感应器131用于检测上述感应片140的位置。因此,感应器131能够通过检测感应片140的位置,从而判断滚刷组件110是否位于第一位置。
42.需要说明的是,感应器131可以为光电开关、红外感应器等。具体地,在本实施例中,感应器131为光电开关。此外,感应片140上还设有与该光电开关相适配的缺口(图未标)。当第一驱动器120驱使滚刷组件110旋转至感应片140上的缺口旋转至与光电开关相对的位置,此时光电开关被导通,并判断滚刷组件110旋转至第一位置,第一驱动器120停止工作,以将切割槽1111与割刀2111对位,方便割刀2111进入切割槽1111清理缠绕的毛发20。
43.还需要说明的是,只有清洁机器人100进入基座200后,感应器131才开始检测感应片140的位置。
44.在一个实施例中,如图6和图7所示,切割组件210还包括丝杠213和螺母214。丝杠213穿设于螺母214,并与第一方向平行,割刀2111连接于螺母214。第二驱动器212连接于丝杠213的一端,并用于驱使丝杠213转动。
45.由此可知,通过设置丝杠213和螺母214的传动结构,能够通过控制丝杠213旋转,使得螺母214和割刀2111一起沿第一方向作直线运动,从而切割缠绕在拖布112上的毛发20,有利于实现自动清理滚刷组件110上缠绕的毛发20。
46.进一步地,如图6和图7所示,切割组件210还包括导向轴215、滑动轴承216、以及轴承座217。导向轴215穿设于滑动轴承216,并与第一方向平行。滑动轴承216安装在轴承座217内。割刀2111连接在轴承座217的外侧。因此,导向轴215、丝杆、以及切割槽1111的长度方向均与第一方向平行。在第二驱动器212驱使丝杠213旋转时,丝杠213推动螺母214沿第一方向移动,轴承座217和滑动轴承216也一起在导向轴215上沿第一方向移动,并带动连接在轴承座217上的割刀2111沿第一方向水平移动,以实现对滚刷组件110上缠绕毛发20的切割。
47.需要说明的是,在螺母214移动的过程中,滑动轴承216和导向轴215起导向的作用,能够进一步提升割刀2111移动时的稳定性。
48.此外,切割组件210上还设有联轴器219。联轴器219连接于丝杠213的一端和第二驱动器212之间。第二驱动器212通过控制联轴器219旋转,进而控制丝杠213旋转。
49.更进一步地,切割组件210还包括刀座2112。刀座2112连接于轴承座217和割刀2111支架。刀座2112与割刀2111相适配,能够提升割刀2111的稳定性。
50.在一个实施例中,如图6和图7所示,切割组件210还包括至少两个轴承盖218。丝杠213的两端各安装有一个滚动轴承230。两个轴承盖218用于将导向轴215的两端和滚动轴承230相背离的两端压紧,以提升连接的稳定性。切割组件210还设有底座220。导向轴215、第二驱动器212、滚动轴承230、以及丝杠213背离第二驱动器212的一端均连接在底座220上。
51.本技术的清洁装置10自动切割清理缠绕毛发20的方式如下:当清洁机器人100进入充电基站后,充电基站上的触针与清洁机器人100上的充电极片接触,且电流导通,确定清洁机器人100到位。此时第一驱动器120继继续驱使滚刷组件110旋转,直至感应片140上的缺口转动至感应器131(光电开关)处,第一驱动器120停止驱使滚刷组件110旋转,此时切割槽1111与割刀2111对位。第二驱动器212驱使割刀2111伸入切割槽1111内后,再驱使丝杠213旋转,以带动螺母214沿第一方向移动。在螺母214沿第一方向移动的过程中,滑动轴承216在导向轴215上沿第一方向移动,以带动轴承座217和刀座2112一起沿第一方向移动,进而带动割刀2111沿第一方向移动,从而将缠绕在拖布112上,且被架空在切割槽1111的槽口处的毛发20切割断,从而实现自动切割清理清洁机器人100滚刷组件110上缠绕的毛发20。
52.应当指出,在说明书中提到的“一个实施例”、“实施例”、“示例性实施例”、“一些实施例”等表示所述的实施例可以包括特定特征、结构或特性,但未必每个实施例都包括该特定特征、结构或特性。此外,这样的短语未必是指同一实施例。此外,在结合实施例描述特定特征、结构或特性时,结合明确或未明确描述的其他实施例实现这样的特征、结构或特性处于本领域技术人员的知识范围之内。
53.应当容易地理解,应当按照最宽的方式解释本公开中的“在
……
上”、“在
……
以上”和“在
……
之上”,以使得“在
……
上”不仅意味着“直接处于某物上”,还包括“在某物上”且其间具有中间特征或层的含义,并且“在
……
以上”或者“在
……
之上”不仅包括“在某物以上”或“之上”的含义,还可以包括“在某物以上”或“之上”且其间没有中间特征或层(即,直接处于某物上)的含义。
54.此外,文中为了便于说明可以使用空间相对术语,例如,“下面”、“以下”、“下方”、“以上”、“上方”等,以描述一个元件或特征相对于其他元件或特征的如图所示的关系。空间相对术语意在包含除了附图所示的取向之外的处于使用或操作中的器件的不同取向。装置可以具有其他取向(旋转90度或者处于其他取向上),并且文中使用的空间相对描述词可以同样被相应地解释。
55.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
56.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术
方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。