1.本实用新型涉及喷涂机器人技术领域,具体为一种屋面自动喷涂翻新机器人。
背景技术:
2.当前,房屋存量超350亿平方米,随着房屋年龄增加,屋顶颜色老化褪色影响美观,高层、超高层建筑的屋面的翻新通常使用吊篮式或安全网安全绳施工,存在安全隐患,喷涂机器人可较好的替代人工对屋面进行喷涂作业,其中申请号为“cn215631370u”所公开的“一种室内喷涂机器人底盘结构及室内喷涂机器人”,解决了现有机器人移动时通过性差,喷涂范围较小等多种弊端,再经过进一步检索发现,申请号为“cn214812047u”所公开的“一种喷涂机器人用喷涂机构及喷涂机器人”其通过具体的结构设置,切实解决了当前喷涂机器人存在着喷涂效果一般,较容易堵塞等技术弊端,但是在实际使用时类似结构的喷涂机器人还存在诸多缺陷,如喷涂机器人不具有远程控制功能,并且装置不具有自动避障功能,自动化程度一般,喷涂机器人的喷嘴结构无法灵活移动,不能较好的适宜斜面屋顶,使用受限,所以需要设计一种屋面自动喷涂翻新机器人来解决现有的问题。
技术实现要素:
3.本实用新型的目的在于提供一种屋面自动喷涂翻新机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种屋面自动喷涂翻新机器人,包括车体、机箱和高压泵,所述车体的正面通过合页活动安装有检修门,所述车体的顶部前端通过支架固定安装有光伏组件,且支架固定在光伏组件的底部两侧,所述车体的顶部后端固定安装有机箱,所述机箱的内部一侧固定安装有信号发射接收装置,且机箱的内部另一侧固定安装有远程遥控电脑,所述机箱的顶部固定安装有主轴电机,所述主轴电机的输出端安装有转轴座,所述转轴座的一侧通过轴承活动安装有调节轴臂一,所述调节轴臂一的顶部一侧通过轴承活动安装有调节轴臂二,所述调节轴臂二的顶部一侧通过轴承活动安装有安装座,所述安装座的顶部固定安装有三维结构光成像扫描摄像头,所述安装座的正面固定安装有防飞溅喷嘴。
5.通过转轴座、调节轴臂一、调节轴臂二、安装座四轴臂旋转方式与三维结构光成像扫描摄像头的扫描配合,可实现斜屋面自动翻转防飞溅喷嘴,更好的对斜面屋顶进行喷涂作业,并且利用信号发射接收装置与远程遥控电脑的配合可便于装置进行远程控制,通过远程控制方便实现平稳自动喷涂作业,工作效率是人工的8-10倍,作业简便,无需围栏,天气因素影响小,仅需一人远程控制即可完成大面积作业。有效解决传统人工效率低,风险高,质量不稳定等因素,并且在三维结构光成像扫描摄像头的作用下装置具有屋面自动识别功能,自动绕障碍功能,自动化程度高,方便使用。
6.优选的,所述车体内部的底部固定安装有控制器,车体的内部两侧固定安装有两组驱动电机,驱动电机的输出端固定安装有驱动轮,且控制器与驱动电机、高压泵、远程遥
控电脑电性连接。利用控制器可控制驱动电机进行运行,从而带动驱动轮运转,使装置整体移动,而控制器与远程遥控电脑电性连接,控制器的运行参数受远程遥控电脑控制,便于工作人员对装置远程操控。
7.优选的,所述检修门的正面上方两侧等距开设有通孔,且检修门的正面上方固定安装有把手。利用检修门可对车体的内部进行保护,利用通孔可便于车体内部电气设备通风散热。
8.优选的,所述机箱的外部一侧通过合页活动安装有保护门,且机箱的正面上方一侧固定安装有距离传感器。利用保护门可对机箱进行保护,利用距离传感器可对装置前方遮挡物进行检测,采用红外传感技术,能感应物体,并将感应信号传输给远程遥控电脑进行处理。
9.优选的,所述转轴座、调节轴臂一、调节轴臂二的一侧安装有中低速无刷电机,且中低速无刷电机通过导线与远程遥控电脑、可拆卸式锂电池电性连接。通过三组中低速无刷电机可分别对调节轴臂一、调节轴臂二、安装座进行驱动,使装置在锁死任意一根轴臂的情况下可以实现绕该轴翻转,以实现左右或上下的移动,便于喷涂作业的进行。
10.优选的,所述安装座的外部一侧固定安装有连接管,且防飞溅喷嘴通过连接管与外置管道的配合与高压泵的输出端连接。利用连接管可便于使用外置管道将防飞溅喷嘴与高压泵连接,以便高压泵通电运行将外部喷涂料输送至防飞溅喷嘴,方便防飞溅喷嘴对其进行喷涂。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型通过远程控制方便实现平稳自动喷涂作业,作业简便,无需围栏,天气因素影响小,仅需一人远程控制即可完成大面积作业,有效解决传统人工效率低,风险高,质量不稳定等因素,并且在三维结构光成像扫描摄像头的作用下装置具有屋面自动识别功能,自动绕障碍功能,自动化程度高,方便使用。
13.2、本实用新型通过转轴座、调节轴臂一、调节轴臂二、安装座四轴臂旋转方式与三维结构光成像扫描摄像头的扫描配合,可实现斜屋面自动翻转防飞溅喷嘴,使装置在锁死任意一根轴臂的情况下可以实现绕该轴翻转,以实现防飞溅喷嘴左右或上下的移动,较为灵活,便于喷涂作业的进行,更好的对斜面屋顶进行喷涂作业。
附图说明
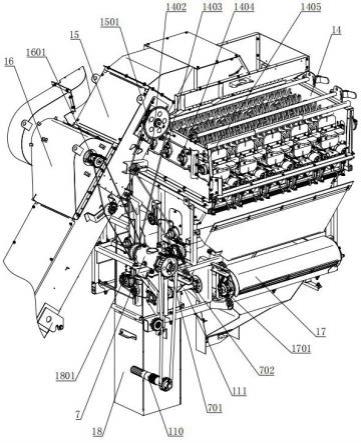
14.图1为本实用新型的主视图;
15.图2为本实用新型的正面结构示意图;
16.图3为本实用新型的背面立体结构示意图;
17.图4为本实用新型的车体、机箱内部结构示意图;
18.图5为本实用新型的安装座局部结构示意图。
19.图中:1、车体;101、控制器;102、驱动电机;103、驱动轮;2、检修门;201、通孔;3、光伏组件;301、支架;4、机箱;401、信号发射接收装置;402、远程遥控电脑;403、保护门;404、距离传感器;5、主轴电机;501、转轴座;502、调节轴臂一;503、调节轴臂二;6、安装座;601、三维结构光成像扫描摄像头;602、防飞溅喷嘴;603、连接管;7、中低速无刷电机;8、高压泵;9、可拆卸式锂电池。
具体实施方式
20.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
21.实施例一
22.如图1、图2、图3、图4和图5所示,本实用新型提出的一种屋面自动喷涂翻新机器人,包括车体1、机箱4和高压泵8,车体1的正面通过合页活动安装有检修门2,车体1的顶部前端通过支架301固定安装有光伏组件3,且支架301固定在光伏组件3的底部两侧,车体1的顶部后端固定安装有机箱4,机箱4的内部一侧固定安装有信号发射接收装置401,且机箱4的内部另一侧固定安装有远程遥控电脑402,机箱4的顶部固定安装有主轴电机5,主轴电机5的输出端安装有转轴座501,转轴座501的一侧通过轴承活动安装有调节轴臂一502,调节轴臂一502的顶部一侧通过轴承活动安装有调节轴臂二503,调节轴臂二503的顶部一侧通过轴承活动安装有安装座6,安装座6的顶部固定安装有三维结构光成像扫描摄像头601,安装座6的正面固定安装有防飞溅喷嘴602。
23.基于实施例一的屋面自动喷涂翻新机器人工作原理是:使用时可将装置放置在指定位置,并利用外置发射器与信号发射接收装置401进行无线连接,准备对装置进行远程遥控作业,信号发射接收装置401的无线遥控原理就是工作人员使用外置的发射器把控制的电信号先编码,无线调频、调幅,转换成无线信号发送给信号发射接收装置401,信号发射接收装置401收到载有信息的无线电波接收,放大,解码,得到原先的控制电信号,把这个电信号再进行功率放大通过远程遥控电脑402用来中低速无刷电机7、驱动电机102以及装置内部其他电气设备,实现无线的遥控,在此过程中利用可拆卸式锂电池9可为装置内部电气设备供电,需要喷涂前可先启动三维结构光成像扫描摄像头601,利用三维结构光成像扫描摄像头601对屋面进行扫描,形成点云数据,并将数据实时反馈给远程遥控电脑402,利用远程遥控电脑402对三维结构光成像扫描摄像头601的点云数据进行智能分析处理,加以ai算法、进行机器人路径自动规划、自动防碰撞等智能化技术,计算出当前屋面实时空间坐标,为引导机器人完成自动喷涂任务做好准备,并将信息通过信号发射接收装置401远程发送给操作人员的接收端,以方便工作人员远程对装置进行控制,高压泵8是装置内超高压喷涂系统的重要组成部件,利用高压泵8的通电运行可对外置的水性或油性涂料进行抽取,并输送给防飞溅喷嘴602进行喷涂,需要调节防飞溅喷嘴602的喷涂方向和喷涂角度时,通过三组中低速无刷电机7可分别对调节轴臂一502、调节轴臂二503、安装座6进行驱动,使装置在锁死任意一根轴臂的情况下可以实现绕该轴翻转,以实现安装座6左右或上下的移动,便于喷涂作业的进行,通过转轴座501、调节轴臂一502、调节轴臂二503、安装座6四轴臂旋转方式与三维结构光成像扫描摄像头601的扫描配合,可实现斜屋面自动翻转防飞溅喷嘴602,更好的对斜面屋顶进行喷涂作业,并且利用信号发射接收装置401与远程遥控电脑402的配合可便于装置进行远程控制,通过远程控制方便实现平稳自动喷涂作业,工作效率是人工的8-10倍,作业简便,无需围栏,天气因素影响小,仅需一人远程控制即可完成大面积作业。有效解决传统人工效率低,风险高,质量不稳定等因素,并且在三维结构光成像扫描摄像头601的作用下装置具有屋面自动识别功能,自动绕障碍功能,自动化程度高,方便使用。
24.实施例二
25.如图1、图2、图3、图4和图5所示,本实用新型提出的一种屋面自动喷涂翻新机器人,相较于实施例一,本实施例还包括:车体1内部的底部固定安装有控制器101,车体1的内
部两侧固定安装有两组驱动电机102,驱动电机102的输出端固定安装有驱动轮103,且控制器101与驱动电机102、高压泵8、远程遥控电脑402电性连接,检修门2的正面上方两侧等距开设有通孔201,且检修门2的正面上方固定安装有把手,机箱4的外部一侧通过合页活动安装有保护门403,且机箱4的正面上方一侧固定安装有距离传感器404,转轴座501、调节轴臂一502、调节轴臂二503的一侧安装有中低速无刷电机7,且中低速无刷电机7通过导线与远程遥控电脑402、可拆卸式锂电池9电性连接,安装座6的外部一侧固定安装有连接管603,且防飞溅喷嘴602通过连接管603与外置管道的配合与高压泵8的输出端连接。
26.本实施例中,如图1和图4所示,利用控制器101可控制驱动电机102进行运行,从而带动驱动轮103运转,使装置整体移动,而控制器101与远程遥控电脑402电性连接,控制器101的运行参数受远程遥控电脑402控制,便于工作人员对装置远程操控;如图2所示,利用检修门2可对车体1的内部进行保护,利用通孔201可便于车体1内部电气设备通风散热;如图2、图3、图4所示,利用保护门403可对机箱4进行保护,利用距离传感器404可对装置前方遮挡物进行检测,采用红外传感技术,能感应物体,并将感应信号传输给远程遥控电脑402进行处理;如图1所示,通过三组中低速无刷电机7可分别对调节轴臂一502、调节轴臂二503、安装座6进行驱动,使装置在锁死任意一根轴臂的情况下可以实现绕该轴翻转,以实现左右或上下的移动,便于喷涂作业的进行;如图1和图5所示,利用连接管603可便于使用外置管道将防飞溅喷嘴602与高压泵8连接,以便高压泵8通电运行将外部喷涂料输送至防飞溅喷嘴602,方便防飞溅喷嘴602对其进行喷涂。
27.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。