技术特征:
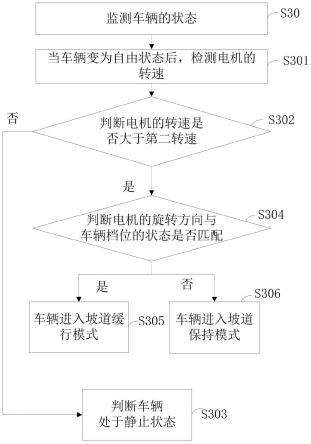
1.一种车辆制动控制方法,所述车辆上设置有电机,其特征在于,所述车辆制动控制方法包括:监测所述车辆的状态;当所述车辆变为自由状态后,检测所述电机的转速;判断所述电机的转速是否大于安全转速;当所述电机的转速大于所述安全转速时,判断所述电机的旋转方向与车辆档位的状态是否匹配;当所述电机的旋转方向与车辆档位的状态匹配时,车辆进入坡道缓行模式;当所述电机的旋转方向与车辆档位的状态不匹配时,车辆进入坡道保持模式。2.根据权利要求1所述的一种车辆制动控制方法,其特征在于,所述车辆内设置有加速装置和制动装置,当所述车辆变为自由状态后,所述加速装置处于自由状态,且所述制动装置处于自由状态。3.根据权利要求2所述的一种车辆制动控制方法,其特征在于,当所述车辆变为自由状态后,检测所述电机的转速包括:当所述加速装置由一定开度变为自由状态后,检测所述电机的转速。4.根据权利要求1所述的一种车辆制动控制方法,其特征在于,所述安全转速的范围为8rpm~15rpm。5.根据权利要求1所述的一种车辆制动控制方法,其特征在于,当所述车辆进入坡道缓行模式时,车辆进入转速控制模式,且所述电机以10rpm~20rpm的转速转动。6.根据权利要求1所述的一种车辆制动控制方法,其特征在于,当所述车辆进入坡道保持模式时,车辆进入转速控制模式,且所述电机以制动转速转动。7.根据权利要求6所述的一种车辆制动控制方法,其特征在于,所述制动转速通过以下公式获得:r=(n*p)/(g*cosa-f);其中,r为制动转速,n为制动系数,p为电机的最大制动功率,g为车的重力,a为坡道的坡度,f为车辆受到的摩擦力。8.根据权利要求3所述的一种车辆制动控制方法,其特征在于,当所述加速装置由一定开度变为自由状态后,检测所述电机的转速,所述一定开度的范围为大于零的开度。9.根据权利要求3所述的一种车辆制动控制方法,其特征在于,当所述加速装置动作时,开始累计时间为电机的检测时间。10.根据权利要求9所述的一种车辆制动控制方法,其特征在于,当所述检测时间到达设定的阈值时,检测所述电机的转速,所述检测时间的阈值的范围为450ms~550ms。11.根据权利要求1所述的一种车辆制动控制方法,其特征在于,当所述电机的转速小于或等于所述安全转速,判断所述车辆处于静止状态。12.一种车辆制动控制系统,其特征在于,所述车辆制动控制系统用于执行权利要求1所述车辆制动控制方法,且所述车辆制动控制系统包括:模拟量采集模块,用于监测所述车辆的状态;控制模块,用于控制所述车辆进入坡道缓行模式或坡道保持模式。
技术总结
本发明公开了一种车辆制动控制方法及系统,所述车辆制动控制方法包括:监测所述车辆的状态;当所述车辆变为自由状态后,检测所述电机的转速;判断所述电机的转速是否大于安全转速;当所述电机的转速大于所述安全转速时,判断所述电机的旋转方向与车辆档位的状态是否匹配;当所述电机的旋转方向与车辆档位的状态匹配时,车辆进入坡道缓行模式;当所述电机的旋转方向与车辆档位的状态不匹配时,车辆进入坡道保持模式。通过本公开的一种车辆制动控制方法及系统,车辆可实现在坡道上自动驻坡。车辆可实现在坡道上自动驻坡。车辆可实现在坡道上自动驻坡。
技术研发人员:薛嘉甫 许跃跃 丁士源
受保护的技术使用者:格力博(江苏)股份有限公司
技术研发日:2021.06.11
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。