透镜驱动装置、摄像机模块及摄像机搭载装置
1.本技术是申请日为2019年8月9日、申请号为201980053520.x、发明名称为“透镜驱动装置、摄像机模块及摄像机搭载装置”、申请人为米尼斯怀斯股份公司、三美电机株式会社的中国发明专利申请的分案申请。
技术领域
2.本发明涉及自动聚焦用及抖动修正用的透镜驱动装置、摄像机模块及摄像机搭载装置。
背景技术:
3.一般而言,在智能手机等便携终端中搭载有小型的摄像机模块。在这种摄像机模块中应用具有自动进行拍摄被拍摄物时的对焦的自动聚焦功能(以下称作“af功能”,af:auto focus,自动聚焦)、以及光学修正拍摄时产生的抖动(振动)以减轻图像模糊的抖动修正功能(以下称作“ois功能”,ois:optical image stabilization,光学防抖)的透镜驱动装置(例如,专利文献1)。
4.具有af功能及ois功能的透镜驱动装置具备用于使透镜部沿光轴方向移动的自动聚焦驱动部(以下称作“af驱动部”)、以及用于使透镜部在与光轴方向正交的平面内摆动的抖动修正驱动部(以下称作“ois驱动部”)。在专利文献1中,af驱动部及ois驱动部中适用了音圈电机(vcm:voice coil motor)。
5.另外,近年来,正在进行具有多个(典型地为两个)透镜驱动装置的摄像机模块的实用化(被称为“双镜头摄像机”)。双镜头摄像机能够同时摄像焦点距离不同的两张图像,或能够同时摄像静止图像和动态图像等,根据所使用的情景,具有各种可能性。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2013-210550号公报
9.专利文献2:国际公开第2015/123787号
技术实现要素:
10.发明要解决的问题
11.但是,如专利文献1那样的利用了vcm的透镜驱动装置受到外部磁性的影响,因此高精度的动作有可能被耽误。尤其是,在并置了透镜驱动装置的双镜头摄像机中,在透镜驱动装置间产生磁干扰的可能性较高。
12.另一方面,在专利文献2中公开了在af驱动部及ois驱动部中适用了超声电机的透镜驱动装置。专利文献2中公开的透镜驱动装置是无磁,从而能够减少外部磁性的影响,但其结构复杂,难以实现小型化及低高度化。
13.本发明的目的在于,提供能够减少外部磁性的影响并且能够实现小型化及低高度化的透镜驱动装置、摄像机模块及摄像机搭载装置。
14.解决问题的方案
15.本发明的一个方式的透镜驱动装置具备:
16.透镜支架,其容纳透镜,且构成为能够借助于自动聚焦驱动部而在光轴方向上移动;
17.抖动修正可动部,其具有沿所述光轴方向贯通的开口,且包括层叠于底座上的第一台层及第二台层,该抖动修正可动部以使所述透镜支架能够在所述光轴方向上移动的方式在所述开口内支撑所述透镜支架;以及
18.抖动修正驱动部,其使所述抖动修正可动部在与所述光轴正交的方向上移动,
19.所述抖动修正驱动部配置于所述第一台层及所述第二台层的外表面侧,所述自动聚焦驱动部配置于所述第一台层及所述第二台层的内表面侧。
20.本发明的一个方式的摄像机模块具备:
21.上述的透镜驱动装置;
22.所述透镜;以及
23.摄像部,对通过所述透镜成像的被拍摄物像进行摄像。
24.本发明的一个方式的透镜驱动装置具备:
25.自动聚焦部,具有配置于自动聚焦固定部的自动聚焦可动部、以及使所述自动聚焦可动部相对于所述自动聚焦固定部在沿着光轴的z方向上移动的自动聚焦驱动部;以及
26.抖动修正部,具有抖动修正固定部、包含所述自动聚焦部的抖动修正可动部、以及使所述抖动修正可动部相对于所述抖动修正固定部在与光轴正交的x方向及y方向上移动的抖动修正驱动部,该透镜驱动装置中,
27.所述抖动修正驱动部具有:第一抖动修正驱动部,沿着所述x方向配置,且使所述抖动修正可动部在所述x方向上移动;以及第二抖动修正驱动部,沿着所述y方向配置,且使所述抖动修正可动部在所述y方向上移动,其中
28.所述第一抖动修正驱动部及所述第二抖动修正驱动部分别具有:
29.抖动修正超声电机,由抖动修正压电元件和抖动修正共振部构成,且配置于所述抖动修正固定部,该抖动修正共振部与所述抖动修正压电元件的振动共振并将振动运动转换为所述x方向上或所述y方向上的直线运动;以及
30.抖动修正动力传递部,将所述抖动修正超声电机与所述抖动修正可动部连结,并将所述x方向上或所述y方向上的直线运动传递至所述抖动修正可动部,
31.所述自动聚焦驱动部具有:
32.自动聚焦超声电机,由自动聚焦压电元件和自动聚焦共振部构成,且配置于所述自动聚焦可动部,该自动聚焦共振部与所述自动聚焦压电元件的振动共振并将振动运动转换为所述z方向上的直线运动;以及
33.自动聚焦动力传递部,将所述自动聚焦超声电机与所述自动聚焦固定部连结,将所述直线运动传递至所述自动聚焦固定部,
34.在由配置有所述第一抖动修正驱动部及所述第二抖动修正驱动部的两个边规定的矩形中,所述自动聚焦驱动部沿着与所述两个边不同的边配置有所述自动聚焦驱动部。
35.本发明的一个方式的摄像机模块具备:
36.上述的透镜驱动装置;
37.透镜部,安装于所述自动聚焦可动部;以及
38.摄像部,对通过所述透镜部成像的被拍摄物像进行摄像。
39.本发明的摄像机搭载装置为信息设备或运输设备,该摄像机搭载装置具备:
40.上述的摄像机模块;以及
41.图像处理部,对由所述摄像机模块得到的图像信息进行处理。
42.发明效果
43.根据本发明,可提供能够减少外部磁性的影响,并且能够实现小型化及低高度化的透镜驱动装置、摄像机模块及摄像机搭载装置。
附图说明
44.图1a、图1b是表示搭载有本发明的一实施方式的摄像机模块的智能手机的图。
45.图2是摄像机模块的外观立体图。
46.图3a、图3b是摄像机模块的透视立体图。
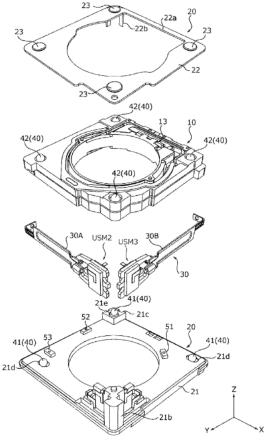
47.图4是透镜驱动装置的分解立体图。
48.图5是透镜驱动装置的分解立体图。
49.图6a、图6b是ois驱动部的立体图。
50.图7是ois可动部的分解立体图。
51.图8是ois可动部的分解立体图。
52.图9是ois可动部的分解立体图。
53.图10a、图10b是af可动部的立体图。
54.图11是表示透镜驱动装置的供电系统及信号系统的图。
55.图12a、图12b是表示作为搭载有车载用摄像机模块的摄像机搭载装置的汽车的图。
具体实施方式
56.以下,基于附图对本发明的实施方式进行详细说明。
57.图1a、图1b是表示搭载本发明的一实施方式的摄像机模块a的智能手机m(摄像机搭载装置)的图。图1a是智能手机m的主视图,图1b是智能手机m的后视图。
58.智能手机m具有由两个背面摄像机oc1、oc2构成的双镜头摄像机。在本实施方式中,背面摄像机oc1、oc2中适用了摄像机模块a。
59.摄像机模块a具备af功能及ois功能,能够自动地进行对被拍摄物进行拍摄时的对焦,并且能够光学修正在拍摄时产生的抖动(振动)来拍摄不模糊的图像。
60.图2是摄像机模块a的外观立体图。图3a、图3b是摄像机模块a的透视立体图。图3b表示将图3a绕z轴旋转180
°
后的状态。此外,图3a、图3b中省略了透镜部2。如图2、图3a及图3b所示,在本实施方式中,使用正交坐标系(x,y,z)来进行说明。在后述的图中,也用相同的正交坐标系(x,y,z)来表示。
61.以如下方式搭载摄像机模块a:在智能手机m实际进行拍摄的情况下,x方向为上下方向(或左右方向)、y方向为左右方向(或上下方向)、z方向为前后方向。即,z方向为光轴方向,图中上侧为光轴方向受光侧,下侧为光轴方向成像侧。另外,将与z轴正交的x方向及y方
向称作“光轴正交方向”,将xy面称作“光轴正交面”。
62.如图2、图3a及图3b所示,摄像机模块a具备实现af功能及ois功能的透镜驱动装置1、将透镜容纳于圆筒形的透镜筒中的透镜部2、对通过透镜部2成像的被拍摄物像进行摄像的摄像部(省略图示)、以及覆盖整体的罩3等。
63.罩3是从光轴方向观察的俯视时呈矩形的有盖的四棱筒状体。在本实施方式中,罩3在俯视时呈正方形。罩3在上表面具有概略圆形的开口3a。透镜部2从开口3a面向外部。罩3例如通过粘接固定于透镜驱动装置1的ois固定部20的底座21(参照图4)。罩3与透镜驱动装置1的上部(减震器23)接触。
64.摄像部(省略图示)被配置在透镜驱动装置1的光轴方向成像侧。摄像部(省略图示)例如具有图像传感器基板及安装于图像传感器基板的摄像元件。摄像元件例如由ccd(charge coupled device,电荷耦合器件)型图像传感器、cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)型图像传感器等构成。摄像元件对通过透镜部2成像的被拍摄物像进行摄像。透镜驱动装置1搭载于图像传感器基板(省略图示),并与其机械连接且电连接。进行透镜驱动装置1的驱动控制的控制部可以设置于图像传感器基板上,也可以设置于搭载摄像机模块a的摄像机搭载设备(在本实施方式中为智能手机m)上。
65.图4、图5是透镜驱动装置1的分解立体图。图5表示将图4绕z轴旋转180
°
后的状态。
66.如图4、图5所示,在本实施方式中,透镜驱动装置1具备ois可动部10、ois固定部20、ois驱动部30及ois支撑部40。此外,图4、图5中,省略了在底座21上形成的配线25(参照图11)。
67.ois可动部10是抖动修正时在光轴正交面内摆动的部分。ois可动部10包括af单元,该af单元具有af可动部11、第一台层12、第二台层16及af驱动部13(参照图7~图9)。ois可动部10相对于ois固定部20在光轴方向上间隔开配置,通过ois支撑部40与ois固定部20连结。关于ois可动部10的详细结构,将在后面说明。
68.ois固定部20是通过ois支撑部40与ois可动部10连接的部分。在本实施方式中,ois固定部20具有底座21及间隔件22。ois可动部10被底座21和间隔件22在光轴方向上夹持。
69.底座21是俯视时呈矩形的部件,在中央具有圆形的开口21a。底座21在矩形的一角具有配置有ois驱动部30的ois电机固定部21b。另外,底座21在ois电机固定部21b的对角位置具有配置间隔件22的支脚部22b的间隔件固定部21c。ois电机固定部21b及间隔件固定部21c形成为从底座面向光轴方向受光侧突出。
70.在底座21上配置有用于检测af可动部11(参照图7~图9)的z位置的第一霍尔元件51、以及用于检测ois可动部10的xy位置的第二霍尔元件52、53。此外,在af可动部11上,与第一霍尔元件51对置地配置有第一磁体61,在ois可动部10的第一台层12上,与第二霍尔元件52、53对置地配置有第二磁体62、63(参照图9)。
71.底座21例如是由包含聚芳酯(par)、par合金(例如,par/pc)、或液晶聚合物的成型材料形成的,该par合金是将含有par的多种树脂材料混合而成的。
72.优选底座21是形成有三维(3d)形状的配线25(参照图11)的树脂成型件(被称为“3d-mid(molded interconnect device),三维模塑互连器件)。由此,能够无须使用印刷配
线基板地形成复杂的配线25。配线25包括:第一霍尔元件51用的供电及信号线251、第二霍尔元件52用的供电及信号线252、第二霍尔元件53用的供电及信号线253、对af驱动部13供电的供电线254、以及对ois驱动部30供电的供电线255。配线25的端部被引出至底座21的侧面。
73.另外,底座21具有容纳滚珠41的滚珠容纳部21d、21e。形成于间隔件固定部21c的上表面的滚珠容纳部21e凹陷地形成为圆形,剩余的3个滚珠容纳部21d凹陷地形成为在x方向上延伸的长圆形形。另外,滚珠容纳部21d的侧面以越靠底面侧则槽宽越窄的方式形成为锥形。
74.间隔件22是俯视时呈矩形的部件,在与af可动部11(透镜支架111,参照图7~图9)对应的部分具有开口22a。另外,间隔件22在矩形的一角具有向光轴方向成像侧延伸的支脚部22b。间隔件22的支脚部22b嵌入并粘接于底座21的间隔件固定部21c,从而ois可动部10以可摆动的状态保持于底座21与间隔件22之间。间隔件22及ois支撑部40作为将ois可动部10按压到底座21的按压部发挥功能。具体而言,在将间隔件22安装于底座21时,第一台层12被向第二台层16按压,第二台层16被向底座21按压。这时,滚珠42介于间隔件22与ois可动部10的第一台层12之间,滚珠41介于ois可动部10的第二台层16与底座21之间。另外,滚珠43介于第一台层12与第二台层16之间(参照图7)。由此,能够以不颤动的状态保持ois可动部10。
75.另外,在间隔件22的上表面配置有减震器23。在本实施方式中,在间隔件的上表面的四角配置有减震器23。利用减震器23,可缓和在落下时来自罩3的冲击,因此耐冲击性得到提高。
76.ois支撑部40相对于ois固定部20,以在光轴方向上间隔开的状态支撑ois可动部10。在本实施方式中,ois支撑部40包括:介于ois可动部10与底座21之间的4个滚珠41、介于ois可动部10与间隔件22之间的4个滚珠42。滚珠41中的1个配置于底座21与第一台层12之间,剩余的3个配置于底座21与第二台层16之间。ois可动部10以相对于ois固定部20间隔开的状态被滚珠41及滚珠42支撑。另外,ois支撑部40在ois可动部10中包括介于第一台层12与第二台层16之间的3个滚珠43(参照图7)。
77.在本实施方式中,通过对构成ois支撑部40的滚珠41~43(共计11个)的可转动的方向进行限制,能够使ois可动部10在xy面内精度良好地摆动。此外,能够适当地变更构成ois支撑部40的滚珠41~43的数量。
78.ois驱动部30具有使ois可动部10在x方向上移动的第一ois驱动部30a、以及使ois可动部10在y方向上移动的第二ois驱动部30b。第一ois驱动部30a及第二ois驱动部30b均为超声电机式的致动器,固定于ois固定部20的ois电机固定部21b。第一ois驱动部30a以沿着x方向延伸的方式配置,第二ois驱动部30b以沿着y方向延伸的方式配置。即,第一ois驱动部30a与第二ois驱动部30b沿着彼此正交的边配置。在本实施方式中,将第一ois驱动部30a和第二ois驱动部30b固定于底座21的电机固定部21b,并使ois电机usm2、usm3邻近,从而将ois电机usm2、usm3用的配线255(参照图11)简化。
79.ois驱动部30的结构如图6a、图6b所示。图6a表示将第二ois驱动部30b的各部件组装后的状态,图6b表示将第二ois驱动部30b的各部件分解后的状态。此外,第一ois驱动部30a的结构与第二ois驱动部30b的结构相同,因此省略图示。
80.如图6a、图6b所示,第二ois驱动部30b具有产生驱动力的ois电机usm3及将驱动力传递至ois可动部10的ois动力传递部34。同样地,第一ois驱动部30a具有产生驱动力的ois电机usm2及将驱动力传递至ois可动部10的ois动力传递部34。
81.ois电机usm2、usm3分别具有ois压电元件31、32、ois共振部33及ois电极35。
82.ois压电元件31、32例如是由陶瓷材料形成的板状元件,通过施加高频电压来产生振动。
83.ois共振部33由导电性材料形成,且与ois压电元件31、32的振动共振并将振动运动转换为x方向或y方向上的直线运动。
84.ois共振部33具有躯干部33a及臂部33b。躯干部33a具有在左右边(图6b中,沿着z方向的边)上各形成有两个凹部33c的大致矩形板状。臂部33b形成为从躯干部33a的上下边(图6b中,沿着y方向的边)向上下边的延伸方向突出,端部33d与ois动力传递部34抵接(以下,称作“ois镊形件抵接部33d”)。
85.ois共振部33至少具有两种共振频率,相对于各个共振频率,以不同的动作变形。换言之,以使ois共振部33相对于两种共振频率以不同的动作变形的方式,设定ois共振部33的形状。不同的动作是指,使ois动力传递部34沿x方向或y方向前进的动作、以及使ois动力传递部34后退的动作。
86.ois压电元件31、32从厚度方向(图6a、图6b中,x方向)贴合到ois共振部33的躯干部33a,并被ois电极35夹持,从而它们彼此电连接。在底座21上所形成的配线255(参照图11)中的高压侧与ois电极35连接,低压侧与ois共振部33连接,由此ois压电元件31、32被施加电压,从而产生振动。
87.ois动力传递部34是与ois电机usm2、usm3连接的镊形件(以下,称作“ois镊形件34”)。ois镊形件34具有台层固定部34a、电机抵接部34b、以及连结部34c。台层固定部34a形成为相对于ois镊形件34的延伸方向弯折成直角,且固定于第一台层12的ois镊形件固定部12k(参照图8、图9)。电机抵接部34b形成为剖面大致u字状,与ois共振部33的ois镊形件抵接部33d抵接。连结部34c是将台层固定部34a与电机抵接部34b连结的部分,形成为从台层固定部34a分支为二且彼此平行。
88.ois电机抵接部34b、34b间的宽度设定为,比ois共振部33的ois镊形件抵接部33d、33d间的宽度宽。由此,在将ois镊形件34安装于ois电机usm2、usm3时,ois镊形件34作为板簧发挥功能,推压力作用于使ois镊形件抵接部33d张开的方向。通过该推压力,ois镊形件34保持于ois镊形件抵接部33d、33d间,因此来自ois共振部33的动力高效地传递至ois镊形件34。
89.另外,在本实施方式中,通过构成包括ois电机usm2、usm3及ois动力传递部34的ois驱动部30,能够增长ois可动部10的移动距离。
90.另外,在本实施方式中,在台层固定部34a与连结部34c之间设置有允许x方向或y方向上的移动的蛇腹状的柔性部34d。由此,能够防止一个ois电机(例如,ois电机usm2)所带来的ois可动部10的移动被与另一个ois电机(例如,ois电机usm3)连接的ois镊形件34阻碍的情况。即,能够防止ois可动部10的绕z轴的旋转,因此能够使ois可动部10在xy平面内精度良好地摆动。
91.图7~图9是ois可动部10的分解立体图。图8表示将图7绕z轴旋转180
°
后的状态。
图9是图8的下方立体图。
92.如图7~图9所示,在本实施方式中,ois可动部10具备af可动部11、af固定部12、af驱动部13及af支撑部14、15。
93.af可动部11是在对焦时在光轴方向上移动的部分。af可动部11相对于第一台层12间隔开配置,并通过af支撑部14、15与第一台层12连接。
94.af可动部11具有对透镜部2(参照图2)进行保持的透镜支架111。透镜支架111例如是由聚芳酯(par)、par合金、液晶聚合物等形成的,该par合金是将含有par的多种树脂材料混合而成的。透镜支架111具有筒状的透镜容纳部111a。透镜部2(参照图2)例如通过粘接固定于透镜容纳部111a。
95.透镜支架111在透镜容纳部111a的上部外周缘具有用于固定af支撑部14的上弹簧固定部111b。另外,透镜支架111在透镜容纳部111a的下部外周缘具有用于固定af支撑部15的下弹簧固定部111c。另外,透镜支架111在沿着x方向的一个侧部具有对af驱动部13进行固定的af电机固定部111d。另外,在透镜支架111上,以与第一霍尔元件51在z方向上对置的方式,配置有z位置检测用的第一磁体61。在本实施方式中,在af驱动部13的附近配置有第一磁体61。第一磁体61例如具有圆柱形状,且在z方向(长度方向)上被磁化。
96.第一台层12是通过af支撑部14、15对af可动部11进行支撑的部分。在第一台层12的光轴方向成像侧配置有第二台层16,第一台层12与第二台层16通过滚珠43连结。第一台层12在抖动修正时在x方向及y方向上移动,第二台层16在抖动修正时仅在x方向上移动。
97.第一台层12是大致矩形筒状的部件,例如由液晶聚合物形成。第一台层12在与透镜支架111对应的部分具有大致圆形的开口12a。开口12a在与af驱动部13对应的区域具有凹部12b,通过在该凹部12b配置外侧的af压电元件131(参照图10),从而实现小型化。
98.第一台层12在上表面具有容纳滚珠42的4个第一滚珠容纳部12c。第一滚珠容纳部12c凹陷地形成为圆形,在底面上形成有用于将滚珠42保持于中央的滚珠保持孔(省略附图标记)。
99.另外,第一台层12在下表面具有容纳滚珠43的3个第二滚珠容纳部12d、以及容纳滚珠41的第三滚珠容纳部12e。第二滚珠容纳部12d凹陷地形成为在y方向上延伸的长圆形形。第三滚珠容纳部12e凹陷地形成为圆形。另外,第二滚珠容纳部12d的侧面以越靠底面侧则槽宽越窄的方式形成为锥形。
100.第一台层12在沿着x方向的一个侧壁的上表面及外侧面具有用于固定af支撑部14的上弹簧固定部12f。另外,第一台层12在沿着x方向的一个侧壁的下表面具有用于固定af支撑部15的下弹簧固定部12g。
101.另外,在第一台层12中,在沿着y方向的一个侧壁的下表面上,以与第二霍尔元件52、53在z方向上对置的方式配置有xy位置检测用的第二磁体62、63。第二磁体62在y方向上被磁化,第二磁体63在x方向上被磁化。
102.另外,第一台层12在开口12a的上侧周缘部具有被配置af动力传递部134的af镊形件固定部12i。另外,第一台层12具有对af动力传递部134进行卡止的af镊形件卡止部12j。
103.第二台层16是l字状的部件,例如由液晶聚合物形成。第二台层16的内周面沿着透镜支架111的外形形成为圆弧状。即,在将af支撑部15固定于第一台层12时,第二台层16不位于与af支撑部15对应的区域中。若将第二台层16设置为矩形,则为了避免在af可动部11
向光轴方向成像侧移动时af支撑部15与第二台层16发生干扰,需要增大第一台层12与第二台层16的间隔距离。相对于此,在本实施方式中,通过将第二台层16设为l字状,能够减小间隔距离,能够实现低高度化。
104.第二台层16在上表面具有容纳滚珠43的3个第一滚珠容纳部16a。第一滚珠容纳部16a与第一台层12的第二滚珠容纳部12d对置。第一滚珠容纳部16a凹陷地形成为在y方向上延伸的长圆形形。另外,第一滚珠容纳部16a的侧面以越靠底面侧则槽宽越窄的方式形成为锥形。
105.另外,第二台层16在下表面具有容纳滚珠41的3个第二滚珠容纳部16b。第二滚珠容纳部16b与底座21的滚珠容纳部21d对置。第二滚珠容纳部16b凹陷地形成为在x方向上延伸的长圆形形。另外,第二滚珠容纳部16b的侧面以越靠底面侧则槽宽越窄的方式形成为锥形。
106.构成ois支撑部40的3个滚珠41以多点接触的方式被底座21的滚珠容纳部21d和第二台层16的第二滚珠容纳部16b夹持。因此,滚珠41稳定地在x方向上转动。
107.另外,滚珠43以多点接触的方式被第二台层16的第一滚珠容纳部16a和第一台层12的第二滚珠容纳部12d夹持。因此,滚珠43稳定地在y方向上转动。
108.另外,滚珠42被第一台层12的第一滚珠容纳部12c和间隔件22夹持。
109.af支撑部14是相对于第一台层12在光轴方向受光侧(上侧)支撑af可动部11(透镜支架111)的上侧弹性支撑部件。在本实施方式中,af支撑部14由两个板簧141、142构成(以下,称作“上弹簧141”、“上弹簧142”)。
110.上弹簧141、142整体具有沿着透镜支架111的透镜容纳部111a的周缘部的形状,例如由钛铜、镍铜、不锈钢等形成。上弹簧141、142以彼此不接触的方式配置于透镜支架111及第一台层12上。上弹簧141、142例如是通过对一张板金进行蚀刻加工及板金加工来形成的。
111.上弹簧141具有:固定于透镜支架111的透镜支架固定部141a、固定于第一台层12的台层固定部141b、以及连结透镜支架固定部141a与台层固定部141b的臂部141c。透镜支架固定部141a沿着透镜支架111的透镜容纳部111a的周缘部形成为圆弧状,开放端部141a-1具有与位于透镜支架111的af电机固定部111d的一端侧的上弹簧固定部111b对应的形状。台层固定部141b形成为直线状,一部分垂直地弯折(弯折部141d)。臂部141c形成为沿着y方向的直线状,伴随af可动部11的移动进行弹性变形。另外,上弹簧141具有配线部141e,该配线部141e自弯折部141d沿着第一台层12的侧壁的形状延伸,且与底座21的供电端子254a(参照图11)连接。配线部141e的端部形成为向z方向弯折,能够跟随af可动部11向z方向的移动。
112.上弹簧142具有:固定于透镜支架111的透镜支架固定部142a、固定于第一台层12的台层固定部142b、以及连结透镜支架固定部142a与台层固定部142b的臂部142c。透镜支架固定部142a具有与位于透镜支架111的af电机固定部111d的另一端侧的上弹簧固定部111b对应的形状。台层固定部142b形成为直线状,一部分垂直地弯折(弯折部142d)。臂部142c形成为沿着x方向的直线状,伴随af可动部11的移动进行弹性变形。另外,上弹簧142具有配线部142e,该配线部142e自弯折部142d沿着第一台层12的侧壁的形状延伸,且与底座21的供电端子254b(参照图11)连接。配线部142e的端部形成为向z方向弯折,能够跟随af可动部11向z方向的移动。
113.在本实施方式中,通过将透镜支架111的上弹簧固定部111b的定位凸起(省略附图标记)嵌插于透镜支架固定部141a、142a的固定孔(省略附图标记),来将上弹簧141、142相对于透镜支架111定位,例如通过粘接固定。另外,通过将台层固定部141b、142b的弯折部141d、142d配置于第一台层12的上弹簧固定部12f,来将上弹簧141、142相对于第一台层12定位,例如通过粘接固定。此外,上述的上弹簧141、142的定位方法及固定方法是一个例子,也可以适用其他公知的方法。
114.这时,如图11所示,上弹簧141的透镜支架固定部141a与af驱动部13的af电极135电连接,上弹簧142的透镜支架固定部142a与af驱动部13的af共振部133电连接。另外,配线部141e、142e以可变形的状态配置于第一台层12的侧壁,且与底座21的供电端子254a、254b电连接。由此,通过上弹簧141、142进行对af驱动部13的供电。
115.af支撑部15是相对于第一台层12在光轴方向成像侧(下侧)支撑af可动部11(透镜支架111)的下侧弹性支撑部件。在本实施方式中,af支撑部15由一个板簧构成(以下,称作“下弹簧15”)。
116.下弹簧15整体具有l字状,例如由钛铜、镍铜、不锈钢等形成。下弹簧15例如是通过对一张板金进行蚀刻加工来形成的。
117.下弹簧15具有:固定于透镜支架111的透镜支架固定部15a、15b、固定于第一台层12的台层固定部15c、连结透镜支架固定部15a与台层固定部15c的臂部15d、以及连结透镜支架固定部15b与台层固定部15c的臂部15e。透镜支架固定部15a具有与位于透镜支架111的af电机固定部111d的一侧的下弹簧固定部111c对应的形状。台层固定部15c形成为直线状。臂部15d、15e分别沿着x方向、y方向形成为直线状,伴随af可动部11的移动进行弹性变形。
118.下弹簧15在z方向与上弹簧141、142平行地配置。这时,下弹簧15的透镜支架固定部15a、台层固定部15c、臂部15d、臂部15e分别与上弹簧142的透镜支架固定部142a、上弹簧141、142的台层固定部141b、142b、上弹簧142的臂部142c、上弹簧141的臂部141c对应。由此,能够防止在使af可动部11在z方向上移动时产生倾斜的情况。
119.在本实施方式中,通过将透镜支架111的下弹簧固定部111c的定位凸起嵌插于透镜支架固定部15b的固定孔,来将下弹簧15相对于透镜支架111进行定位、固定。另外,通过将第一台层12的下弹簧固定部12g的定位凸起嵌插于台层固定部15c的固定孔,来将下弹簧15相对于第一台层12进行定位、固定。此外,上述的下弹簧15的定位方法及固定方法是一个例子,也可以适用其他公知的方法。
120.af驱动部13使af可动部11在z方向上移动。与ois驱动部30同样地,af驱动部13是超声电机式的致动器,且固定于af可动部11(透镜支架111的af电机固定部111d)。
121.af驱动部13的结构如图10a、图10b所示。图10a表示将af驱动部13的各部件组装后的状态,图10b表示将af驱动部13的各部件分解后的状态。
122.如图10a、图10b所示,af驱动部13具有产生驱动力的af电机usm1及将驱动力传递至af可动部11的af动力传递部134。
123.af电机usm1具有af压电元件131、132、af共振部133及af电极135。
124.af压电元件131、132例如是由陶瓷材料形成的板状元件,通过施加高频电压来产生振动。
125.af共振部133由导电性材料形成,且与af压电元件131、132的振动共振并将振动运动转换为z方向上的直线运动。
126.af共振部133具有躯干部133a及臂部133b。躯干部133a具有在上下边(图10b中,沿着x方向的边)上各形成有两个凹部133c的大致矩形板状。臂部133b形成为从躯干部133a的左右边(图10b中,沿着z方向的边)向上下边的延伸方向突出,端部133d与af动力传递部134抵接(以下,称作“af镊形件抵接部133d”)。
127.af共振部133至少具有两种共振频率,相对于各个共振频率,以不同的动作变形。换言之,以使af共振部133相对于两种共振频率以不同的动作变形的方式,设定af共振部133的形状。不同的动作是指,使af动力传递部134沿z方向前进的动作、以及使af动力传递部134后退的动作。
128.af压电元件131、132从厚度方向(在图10a、图10b中,y方向)贴合到af共振部133的躯干部133a,并被af电极135夹持,从而它们彼此电连接。成为高压侧的供电线的上弹簧141与af电极135连接,成为低压侧(gnd)的供电线的上弹簧142与af共振部133连接,由此af压电元件131、132被施加电压,从而产生振动。
129.af动力传递部134是将af电机usm1夹入的镊形件(以下,称作“af镊形件134”)。af镊形件134具有台层固定部134a、af电机抵接部134b、以及连结部134c。台层固定部134a大致为圆弧形,且固定于第一台层12的af镊形件固定部12i。af电机抵接部134b具有在yz面上扩展的平板形,与af共振部133的af镊形件抵接部133d抵接。连结部134c是连结台层固定部134a与af电机抵接部134b的部分,具有三维地弯折的曲柄形状。连结部134c配置于第一台层12的af镊形件卡止部12j的光轴方向成像侧。
130.af电机抵接部134b、134b间的宽度设定为,比af共振部133的af镊形件抵接部133d、133d间的宽度窄。由此,在将af镊形件134安装于af电机usm1时,af镊形件134作为板簧发挥功能,推压力作用于af驱动部13侧。通过该推压力,af驱动部13保持于af电机抵接部134b、134b间,因此来自af共振部133的动力高效地传递至af镊形件134。
131.另外,在本实施方式中,通过构成为包括af电机usm1及af动力传递部134的af驱动部13,能够增长af可动部11(透镜支架111)的移动距离。
132.在af驱动部13中,即使以将af镊形件134向光轴方向成像侧压下的方式驱动了af电机usm1,但由于af镊形件134的大部分固定于第一台层12的上表面,从而af镊形件134不会向光轴方向成像侧移动。另外,即使以将af镊形件134向光轴方向受光侧推上的方式驱动了af电机usm1,但由于af镊形件134的浮置的连结部134c卡止于第一台层12的af镊形件卡止部12j,从而af镊形件134也不会向光轴方向受光侧移动。这样,在af驱动部13中,af镊形件134牢固地固定于第一台层12从而不能在z方向上移动,因此若驱动了af驱动部13,则配置有af驱动部13的af可动部11在z方向上移动。
133.在透镜驱动装置1中,在af可动部11(透镜支架111)中配置有第一磁体61,在ois固定部20(底座21)中配置有第一霍尔元件51。第一霍尔元件51主要检测由第一磁体61形成的磁场。能够基于第一霍尔元件51的检测结果,来确定出z方向上的af可动部11的位置。
134.第一磁体61及第一霍尔元件51构成对af可动部11向z方向的移动进行检测的z位置检测部。通过设置z位置检测部,能够进行闭环控制,因此能够进行高精度的对焦。
135.在本实施方式中,第一磁体61具有圆柱形状,因此第一霍尔元件51的输出取决于
相对于第一磁体61的基准位置(不进行抖动修正时的xy平面中的位置)的位移(相当于以基准位置为原点的半径)。即,即使ois可动部10的xy平面中的位置(以下,称作“xy位置”)不同,只要相对于基准位置的位移相同,则第一霍尔元件51的输出也相同。因此,通过将ois可动部10的xy位置换算为半径并以位移进行表示,能够容易地计算为抵消抖动修正的影响所需的修正值。这样,即使由于抖动修正,ois可动部10在xy平面内摆动从而与第一霍尔元件51交叉的磁场发生变化,也能够容易地进行修正。
136.另外,在透镜驱动装置1中,在ois可动部10(第一台层12)中配置有第二磁体62、63,在ois固定部20(底座21)中配置有第二霍尔元件52、53。第二霍尔元件52主要检测由第二磁体62形成的磁场,第二霍尔元件53主要检测由第二磁体63形成的磁场。能够基于第二霍尔元件52、53的检测结果,确定出xy面内的ois可动部10的位置。
137.第二磁体62、63及第二霍尔元件52、53构成对ois可动部10向x方向及y方向的移动进行检测的xy位置检测部。通过设置xy位置检测部,能够进行闭环控制,因此能够进行高精度的抖动修正。
138.在透镜驱动装置1中,若对af驱动部13施加电压,则af压电元件131、132振动,af共振部133以与频率相应的动作来变形。由于af镊形件134固定于第一台层12,因此af驱动部13在z方向上滑动、移动。
139.这样,af可动部11在z方向上移动,从而进行对焦。这时,通过反馈z位置检测部的检测结果,能够准确控制af可动部11的平移移动。
140.在透镜驱动装置1中,若对ois驱动部30施加电压,则ois压电元件31、32振动,ois共振部33以与频率相应的动作变形。由此,ois镊形件34在x方向或y方向上滑动来移动。
141.具体而言,在第一ois驱动部30a受到驱动,从而ois镊形件34在x方向上移动的情况下,动力传递至第一台层12。由第一台层12和第二台层16夹持的滚珠43无法在x方向上转动,但由第二台层16和底座21夹持的滚珠41能够在x方向上转动。因此,能够在保持相对于底座21的、y方向上的位置不变的状态下,第一台层12和第二台层16一起在x方向上移动。
142.另一方面,在第二ois驱动部30b受到驱动,从而ois镊形件34在y方向上移动的情况下,动力传递至第一台层12。由第一台层12和第二台层16夹持的滚珠43能够在y方向上转动,但由第二台层16和底座21夹持的滚珠41无法在y方向上转动。因此,能够在保持相对于底座21的、x方向上的位置不变的状态下,只有第一台层12在y方向上移动。
143.这样,ois可动部10在xy平面内摆动,从而进行抖动修正。具体而言,以使摄像机模块a的角度抖动被抵消的方式,基于来自抖动检测部(例如陀螺仪传感器,省略图示)的表示角度抖动的检测信号,控制对ois驱动部30的通电电压。这时,通过反馈xy位置检测部的检测结果,能够准确控制ois可动部10的平移移动。
144.这样,透镜驱动装置1具备:自动聚焦部,具有配置于第一台层12的af可动部11、以及使af可动部11相对于第一台层12在沿着光轴的z方向上移动的af驱动部13;以及抖动修正部,具有ois固定部20、包含自动聚焦部的ois可动部10、以及使ois可动部10相对于ois固定部20在与光轴正交的x方向及y方向上移动的ois驱动部30。
145.ois驱动部30具有:第一ois驱动部30a,沿着x方向配置,且使ois可动部10在x方向上移动;以及第二ois驱动部30b,沿着y方向配置,且使ois可动部10在y方向上移动。
146.第一ois驱动部30a及第二ois驱动部30b分别具有:ois电机usm2、usm3(抖动修正
超声电机),由ois压电元件31、32和ois共振部33构成,且配置于ois固定部20,该ois共振部33与ois压电元件31、32的振动共振并将振动运动转换为x方向上或y方向上的直线运动;以及ois动力传递部34,将ois电机usm2、usm3与ois可动部10连结,并将x方向上或y方向上的直线运动传递至ois可动部10。
147.af驱动部13具有:af电机usm1(自动聚焦超声电机),由af压电元件131、132和af共振部133构成,且配置于af可动部11,该af共振部133与af压电元件131、132的振动共振并将振动运动转换为z方向上的直线运动;以及af动力传递部134,将af电机usm1与第一台层12连结,并将直线运动传递至第一台层12。
148.在由配置有第一ois驱动部30a及第二ois驱动部30b的两个边规定的矩形中,沿着与所述两个边不同的边配置有af驱动部13。
149.根据透镜驱动装置1,能够减少外部磁性的影响,并且能够实现小型化及低高度化。因此,即使如智能手机m那样,将具有透镜驱动装置1的摄像机模块a邻近地配置,也不会受到磁性的影响,因此非常适合用于双镜头摄像机。
150.以上,基于实施方式对由本发明者完成的发明进行了具体说明,但本发明并不限于上述实施方式,能够在不脱离其要点的范围内进行变更。
151.例如,在实施方式中,作为具备摄像机模块a的摄像机搭载装置,以作为作为带摄像机的便携终端的智能手机m为例进行了说明,但本发明能够用于具有摄像机模块和对由摄像机模块得到的图像信息进行处理的图像处理部的摄像机搭载装置。摄像机搭载装置包括信息设备及运输设备。信息设备例如包括带摄像机的便携电话机、笔记本电脑、平板终端、便携式游戏机、网络摄像机(web camera)、带摄像机的车载装置(例如,后方监控装置、行车记录仪装置)。另外,运输设备例如包括汽车。
152.图12a、图12b是表示作为搭载车载用摄像机模块vc(vehicle camera,车用摄像机)的摄像机搭载装置的汽车v的图。图12a是汽车v的主视图,图12b是汽车v的后方立体图。汽车v搭载实施方式中所说明的摄像机模块a作为车载用摄像机模块vc。如图12a、图12b所示,车载用摄像机模块vc例如朝向前方安装于挡风玻璃,或者朝向后方安装于尾门。该车载用摄像机模块vc被作为后方监控用、行车记录仪用、防碰撞控制用、自动驾驶控制用等的摄像机模块使用。
153.应该认为此次公开的实施方式在所有方面均为例示,而非用于限制。本发明的范围并非由上述说明表示,本发明的范围由权利要求书表示,且包括与权利要求书等同的含义及与权利要求书等同的范围内的所有变更。
154.在2018年8月13日提出的日本专利申请特愿2018-152250号中包含的说明书、附图及说明书摘要的公开内容全部引用于本技术。
155.附图标记说明
156.1 透镜驱动装置
157.10 ois可动部(抖动修正可动部)
158.11 af可动部(自动聚焦可动部)
159.111 透镜支架
160.12 第一台层(自动聚焦固定部)
161.13 af驱动部(自动聚焦驱动部)
162.131、132 af压电元件(自动聚焦压电元件)
163.133 af共振部(自动聚焦共振部)
164.134 af动力传递部、af镊形件(自动聚焦动力传递部)
165.135 af电极(自动聚焦电极)
166.14、15 af支撑部(自动聚焦支撑部)
167.16 第二台层
168.20 ois固定部(抖动修正固定部)
169.21 底座
170.22 间隔件
171.30 ois驱动部(抖动修正驱动部)
172.31、32 ois压电元件(抖动修正压电元件)
173.33 ois共振部(抖动修正共振部)
174.34 ois动力传递部、ois镊形件(抖动修正动力传递部)
175.35 ois电极(抖动修正电极)
176.40 ois支撑部(抖动修正支撑部)
177.41~43 滚珠
178.usm1 af电机(自动聚焦超声电机)
179.usm2、usm3 ois电机(抖动修正超声电机)
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。