1.本发明涉及一种组装系统,尤其涉及一种自动化车轮组装系统。
背景技术:
2.螺栓连接式车轮的轮辋焊合件与轮辐之间通常是采用螺栓、垫片、螺母进行连接的。这种连接方式目前都是由人工组装完成,操作人员除了完成组装工作外,还需要自己完成工件的搬运和固定工作,人力成本高,生产效率低,长时间的体力工作还存在安全隐患。
技术实现要素:
3.本发明的目的是克服现有的缺陷,提供一种自动化车轮组装系统,解决目前车轮组装工作存在人力成本高、生产效率低、安全性差的问题。
4.为了解决上述技术问题,本发明提供了如下的技术方案:
5.一种自动化车轮组装系统,包括磁吸转移装置,用于完成轮辐的磁吸及转移工作;第一夹持转移装置,用于夹持轮辋焊合件配合完成组装预紧及完成半成品车轮的转移工作;螺栓紧固装置,用于完成半成品车轮的轮辋焊合件与轮辐之间的螺栓紧固工作;第二夹持转移装置,结构与所述第一夹持转移装置相同,用于成品车轮的抓取和转移;气动控制溜槽,用于成品车轮的二次转移。
6.进一步地,包括电磁铁挡盘器,用于在组装过程中顶住螺栓头,所述电磁铁挡盘器利用第一吊具进行空间移动。
7.进一步地,所述电磁铁挡盘器包括挡料盘,所述挡料盘的下端面连接有若干第一电磁铁,所述第一电磁铁的外缘能够吸在轮辋内壁上;所述挡料盘和第一电磁铁之间设置有连接盘,所述连接盘下端面与所述第一电磁铁可拆卸连接,所述连接盘上端面通过连接杆与所述挡料盘的下端面连接;所述第一电磁铁均布于所述连接盘下端面的外缘并通过螺栓与连接盘连接;所述连接杆的上端与所述挡料盘固定连接,所述连接杆的下端贯穿所述连接盘,所述连接盘能够沿所述连接杆自由滑动,所述连接盘与连接杆之间设置有锁紧装置;所述锁紧装置为凸轮锁紧机构,所述凸轮锁紧机构的凸轮座固定在所述连接盘的下端面,所述凸轮座上通过凸轮转销安装有凸轮,所述凸轮连接有凸轮手柄;所述第一电磁铁用于磁吸的接触面由下至上向内倾斜;每个所述第一电磁铁的下端面设置有连接环,所述连接环通过尼龙绳共同连接有吊环,所述吊环与所述第一吊具连接。
8.进一步地,所述磁吸转移装置包括电磁铁吸盘件和第二吊具,所述电磁铁吸盘件包括固定盘,所述固定盘的上端与所述第二吊具连接,所述固定盘的下端面设置有若干第二电磁铁,所述电磁铁吸盘件利用所述第二吊具进行空间移动。
9.进一步地,所述固定盘上间隔设置有若干腰孔,每个所述腰孔的内端指向所述固定盘的圆心且轴线与所述固定盘的径向一致,每个所述第二电磁铁的上端连接有螺杆,所述螺杆穿过所述腰孔并螺纹连接有第一紧固螺栓。
10.进一步地,所述第一夹持转移装置包括支撑柱,所述支撑柱上套设有轴套,所述轴
套能够沿所述支撑柱自由滑动,所述轴套的外侧套设有机械手连接座,所述机械手连接座能够绕所述轴套自由旋转,所述机械手连接座的外侧面通过第一旋转驱动机构连接有装夹机械手;所述机械手连接座连接有第二旋转驱动机构和升降驱动机构,用于驱动所述机械手连接座进行水平旋转和竖直升降;所述第一旋转驱动机构包括固定座,所述固定座的一端与所述机械手连接座的外侧面连接,所述固定座的另一端连接有转轴套壳,所述转轴套壳内旋转连接有第一转轴,所述第一转轴的前端连接有所述装夹机械手;所述转轴套壳的外侧面设置有第一转动电机,所述第一转动电机的输出轴与所述第一转轴通过第一齿轮副传动连接;所述支撑柱的顶部连接有主齿轮,所述主齿轮的上端连接有旋转轴芯座,所述旋转轴芯座上套设有驱动固定座,所述驱动固定座能够绕所述旋转轴芯座自由旋转;所述升降驱动机构包括丝杆,所述丝杆的上端贯穿所述驱动固定座且与所述驱动固定座旋转连接,所述丝杆的下端贯穿所述机械手连接座且与所述机械手连接座螺纹连接,所述驱动固定座上端面设置有升降电机,所述升降电机的输出轴与所述丝杆的上端端部通过第二齿轮副传动连接;所述第二旋转驱动机构包括第二转轴,所述第二转轴贯穿所述驱动固定座且与所述驱动固定座旋转连接,所述第二转轴的下端套设有传动齿轮,所述传动齿轮与所述主齿轮啮合;所述驱动固定座上端面设置有第二转动电机,所述第二转动电机的输出轴与所述第二转轴的上端端部通过第三齿轮副传动连接。
11.进一步地,所述驱动固定座的下端面外缘设置有内齿轮,所述内齿轮与所述传动齿轮啮合;所述机械手连接座被所述丝杆下端贯穿的位置设置有贯穿孔,所述贯穿孔内设置有丝母套件和导向套,所述丝杆与所述丝母套件螺纹连接,所述丝杆能够在所述导向套内自由旋转。
12.进一步地,所述气动控制溜槽包括支架,所述支架下端面设置有若干可调节支脚,所述支架上端面设置有轨道槽组件,所述轨道槽组件包括两个平行相对设置的轨道槽板,两个所述轨道槽板能够水平滑动以改变两个所述轨道槽板之间的距离,每个所述轨道槽板与支架之间设置有第一限位结构使所述轨道槽板固定在指定位置;所述支架包括两个第一水平杆,两个所述第一水平杆与所述轨道槽板平行,两个所述第一水平杆的端部之间各设置有一个水平滑杆,每个所述水平滑杆分别与两个所述第一水平杆的端部垂直固定连接,每个所述水平滑杆上设置有两个滑套,每个所述滑套的上端对应连接一个所述轨道槽板的下端,每个所述滑套能够沿对应所述水平滑杆自由滑动;所述第一限位结构包括所述水平滑杆上的若干第一限位孔、所述滑套上的第二限位孔和第一定位销;每个所述可调节支脚包括两个平行相对设置的调节夹板,两个所述调节夹板内部铰接有一个旋转支撑脚,所述旋转支撑脚的上端与所述调节夹板铰接,所述旋转支撑脚的下端伸出至所述调节夹板的外部,所述旋转支撑脚与所述调节夹板之间设置有第二限位结构使所述旋转支撑脚固定在指定位置;所述第二限位结构包括所述调节夹板上的若干第三限位孔、所述旋转支撑脚上的第四限位孔和第二定位销或包括所述调节夹板上的弧形孔、所述旋转支撑脚上的第五限位孔和第二紧固螺栓,所述弧形孔旁设置有刻度表。
13.进一步地,两个所述第一水平杆之间垂直固定有气缸固定杆,所述气缸固定杆上设置有伸缩气缸,所述伸缩气缸的伸缩杆斜向上且朝向溜槽来料方向;所述伸缩气缸连接有电磁阀和时间继电器;所述伸缩杆的端部设置有橡胶头;所述旋转支撑脚的下端端部连接有带锁止结构的万向轮。
14.进一步地,包括自动升降机,用于将成品车轮抬升到指定高度;悬挂链挂钩机械手,用于将成品车轮固定在悬挂链上。
15.本发明一种自动化车轮组装系统,通过多种机械结构的组合,实现轮辋焊合件与轮辐的输送、定位和拼装工作以及成品车轮的输送工作,操作人员只需完成组装预紧工作,节省了人力,提高了生产效率,消除了安全隐患。
附图说明
16.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
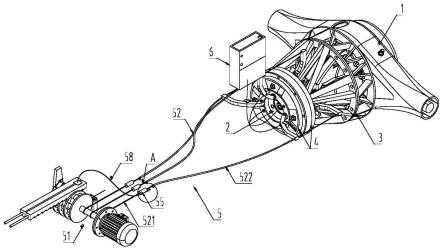
17.图1是本发明的整体结构示意图;
18.图2是本发明中电磁铁挡盘器的主视示意图;
19.图3是本发明中电磁铁挡盘器的仰视示意图;
20.图4是本发明中电磁铁吸盘件的结构示意图;
21.图5是本发明中第一夹持转移装置的结构示意图;
22.图6是本发明中装夹机械手位于入料地坑内时的状态示意图;
23.图7是本发明中气动控制溜槽的结构示意图;
24.图8是图7中h处的放大示意图。
具体实施方式
25.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
26.如图1-8所示,一种自动化车轮组装系统,包括磁吸转移装置,用于完成轮辐的磁吸及转移工作;两个第一夹持转移装置1,用于夹持轮辋焊合件配合完成组装预紧及完成半成品车轮的转移工作;螺栓紧固装置2(该装置为现有技术,详见申请号为202123023341.5的公开专利),用于完成半成品车轮的轮辋焊合件与轮辐之间的螺栓紧固工作;第二夹持转移装置3,结构与第一夹持转移装置1相同,用于成品车轮的抓取和转移;气动控制溜槽4,用于成品车轮的二次转移。
27.系统还包括两个电磁铁挡盘器5,用于在组装过程中顶住螺栓头,电磁铁挡盘器5利用第一吊具6进行空间移动,第一吊具采用龙门吊。
28.电磁铁挡盘器5包括挡料盘51,挡料盘51的下端面连接有四个第一电磁铁52,第一电磁铁52的外缘能够吸在轮辋a内壁上;挡料盘51和第一电磁铁52之间设置有连接盘53,连接盘53下端面与第一电磁铁52可拆卸连接,连接盘53上端面通过连接杆54与挡料盘51的下端面连接;第一电磁铁52均布于连接盘53下端面的外缘并通过螺栓与连接盘53连接;连接杆54的上端与挡料盘51固定连接,连接杆54的下端贯穿连接盘53,连接盘53能够沿连接杆54自由滑动,连接盘53与连接杆54之间设置有锁紧装置;锁紧装置为凸轮锁紧机构,凸轮锁紧机构的凸轮座55固定在连接盘53的下端面,凸轮座55上通过凸轮转销安装有凸轮56,凸轮56连接有凸轮手柄57;每个第一电磁铁52的下端面设置有连接环58,连接环58通过尼龙绳59共同连接有吊环510,吊环510与第一吊具6连接。
29.电磁铁挡盘器的优点有:
30.根据不同轮辋的内径尺寸,采用对应尺寸的连接盘和挡料盘与电磁铁连接;根据不同轮辋的宽度,调节挡料盘和连接盘之间的距离并利用凸轮锁紧机构将二者的位置相对固定(凸轮旋转顶住连接杆实现锁紧),保证电磁铁磁吸的同时挡料盘能顺利顶住螺栓头。
31.电磁铁挡盘器的工作原理:
32.先将螺栓b插入到轮辋焊合件c的预制孔内,然后将本装置放入轮辋a内,使挡料盘将螺栓头顶住并利用电磁铁使装置吸在轮辋a内,然后将轮辋a翻转(90
°
或180
°
均可),安装垫片d到螺栓b上,然后放上轮辐e使螺栓b插入轮辐e的预制孔内,最后再拧紧螺母f完成轮辋焊合件c与轮辐e的连接。图2中,左半面为轮辐安装前,右半面为螺母安装后。
33.磁吸转移装置包括电磁铁吸盘件7和第二吊具8,电磁铁吸盘件7包括固定盘71,固定盘71的上端与第二吊具8连接,固定盘71的下端面设置有三个第二电磁铁72,电磁铁吸盘件7利用第二吊具8进行空间移动,第二吊具采用平衡吊。
34.固定盘71上间隔设置有三个腰孔73,每个腰孔73的内端指向固定盘71的圆心且轴线与固定盘71的径向一致,每个第二电磁铁72的上端连接有螺杆,螺杆穿过腰孔73并螺纹连接有第一紧固螺栓74。根据不同的轮辐尺寸,调节第二电磁铁的位置,保证磁吸的稳定性。
35.第一夹持转移装置1包括支撑柱101,支撑柱101上套设有轴套102,轴套102能够沿支撑柱101自由滑动,轴套102的外侧套设有机械手连接座103,机械手连接座103能够绕轴套102自由旋转(机械手连接座与轴套之间设置有轴承件),机械手连接座103的外侧面通过第一旋转驱动机构连接有装夹机械手104(采用气缸或丝杆传动以实现夹爪的开合,属于公知技术);机械手连接座103连接有第二旋转驱动机构和升降驱动机构,用于驱动机械手连接座103进行水平旋转和竖直升降;第一旋转驱动机构包括固定座105,固定座105的一端与机械手连接座103的外侧面连接,固定座105的另一端连接有转轴套壳106,转轴套壳106内旋转连接有第一转轴107(转轴套壳与第一转轴之间设置有轴承件),第一转轴107的前端连接有装夹机械手104;转轴套壳106的外侧面设置有第一转动电机108,第一转动电机108的输出轴与第一转轴107通过第一齿轮副传动连接;支撑柱101的顶部连接有主齿轮109,主齿轮109的上端连接有旋转轴芯座110,旋转轴芯座110上套设有驱动固定座111,驱动固定座111能够绕旋转轴芯座110自由旋转;升降驱动机构包括丝杆112,丝杆112的上端贯穿驱动固定座111且与驱动固定座111旋转连接(驱动固定座与丝杆之间设置有轴承件),丝杆112的下端贯穿机械手连接座103且与机械手连接座103螺纹连接,驱动固定座111上端面设置有升降电机113,升降电机113的输出轴与丝杆112的上端端部通过第二齿轮副传动连接;第二旋转驱动机构包括第二转轴114,第二转轴114贯穿驱动固定座111且与驱动固定座111旋转连接(驱动固定座与第二转轴之间设置有轴承件),第二转轴114的下端套设有传动齿轮115,传动齿轮115与主齿轮109啮合;驱动固定座111上端面设置有第二转动电机116,第二转动电机116的输出轴与第二转轴114的上端端部通过第三齿轮副传动连接。
36.第一夹持转移装置的工作原理:
37.支撑柱的两侧分别设置有入料地坑和出料地坑,装夹机械手的初始位置位于入料地坑的上方,第一转动电机控制第一转轴转动使装夹机械手的两个夹爪旋转至竖直平面内,升降电机控制丝杆转动使机械手连接座带动装夹机械手下降至入料地坑内,如图6所示,操作人员将待组装轮辋g滚到夹爪之间后,控制装夹机械手将待组装轮辋夹紧;
38.升降电机控制丝杆转动使机械手连接座带动装夹机械手上升至组装指定高度,第一转动电机控制第一转轴转动使装夹机械手的两个夹爪旋转至水平平面内,第二转动电机控制第二转轴转动使驱动固定座转动,进而带动机械手连接座转动使装夹机械手旋转到组装指定位置,操作人员在组装指定位置完成轮辐与轮辋的组装工作;
39.第二转动电机控制第二转轴使驱动固定座转动,进而带动机械手连接座转动使装夹机械手旋转至出料地坑的上方,第一转动电机控制第一转轴转动使装夹机械手的两个夹爪旋转至竖直平面内,升降电机控制丝杆转动使机械手连接座带动装夹机械手下降至出料地坑内,控制装夹机械手将组装好的轮辋释放,操作人员将组装好的轮辋滚出夹爪之间,以便进行下一道工序;
40.升降电机控制丝杆转动使机械手连接座带动装夹机械手上升到复位指定高度,第二转动电机控制第二转轴使驱动固定座转动,进而带动机械手连接座转动使装夹机械手旋转至初始位置。
41.气动控制溜槽4包括支架,支架下端面设置有若干可调节支脚,支架上端面设置有轨道槽组件,轨道槽组件包括两个平行相对设置的轨道槽板41,两个轨道槽板41能够水平滑动以改变两个轨道槽板41之间的距离,每个轨道槽板41与支架之间设置有第一限位结构使轨道槽板41固定在指定位置;支架包括两个第一水平杆42,两个第一水平杆42与轨道槽板41平行,两个第一水平杆42的端部之间各设置有一个水平滑杆43,每个水平滑杆43分别与两个第一水平杆42的端部垂直固定连接,每个水平滑杆43上设置有两个滑套44,每个滑套44的上端对应连接一个轨道槽板41的下端,每个滑套44能够沿对应水平滑杆43自由滑动;第一限位结构包括水平滑杆43上的若干第一限位孔、滑套44上的第二限位孔和第一定位销(图中未示出);每个可调节支脚包括两个平行相对设置的调节夹板45,两个调节夹板45内部铰接有一个旋转支撑脚46,旋转支撑脚46的上端与调节夹板45铰接,旋转支撑脚46的下端伸出至调节夹板45的外部,旋转支撑脚46与调节夹板45之间设置有第二限位结构使旋转支撑脚46固定在指定位置。
42.第一套第二限位结构包括调节夹板45上的若干第三限位孔、旋转支撑脚46上的第四限位孔和第二定位销(图中未示出);第二套第二限位结构包括调节夹板45上的弧形孔47、旋转支撑脚46上的第五限位孔和第二紧固螺栓(图中未示出),弧形孔47旁设置有刻度表(图中未示出)。
43.该气动控制溜槽能够实现高度及宽度的调节,宽度调节工作原理:
44.根据车轮的实际尺寸来确定两个轨道槽板的间距,进而确定与间距对应的第一限位孔的位置,然后在保证车轮中心线与溜槽中心线一致的前提下,对称调整轨道槽板的位置,当滑套上的第二限位孔到达指定的第一限位孔位置后,将第一定位销依次插入第二限位孔和第一限位孔。
45.高度调节工作原理:
46.当采用第一套第二限位结构时,根据实际使用的需求,来确定溜槽的高度,进而确定与高度对应的第三限位孔的位置,转动旋转支撑脚,当第四限位孔到达指定的第三限位孔的位置后,将第二定位销依次插入第三限位孔和第四限位孔;
47.当采用第二套第二限位结构时,根据实际使用的需求,来确定溜槽的高度,进而确定与高度对应的弧形孔的刻度,转动旋转支撑脚,当旋转支撑脚到达指定的刻度后,将紧固
螺栓旋紧。
48.系统还包括自动升降机9(该装置为现有技术,详见申请号为202023167453.3的公开专利),用于将成品车轮抬升到指定高度;悬挂链挂钩机械手10(该装置为现有技术,详见申请号为202023167424.7的公开专利),用于将成品车轮固定在悬挂链上。
49.整套系统设置在电泳轮辋溜槽11和电泳轮辐输送带12的旁侧,系统整体的工作流程为:
50.1.人工将电泳轮辋溜槽内的轮辋焊合件,滚入第一夹持转移装置中的装夹机械手内,装夹机械手夹紧轮辋焊合件;
51.2.装夹机械手通过升降电机件带动上升离开入料地坑,并通过第一转动电机带动装夹机械手旋转至水平位置,再调整上升到人体上螺栓适合的高度;
52.3.先将平衡吊上的电磁铁吸盘件调整到对应轮辐的尺寸,再用电磁铁吸盘件吸住轮辐,通过平衡吊将轮辐吊入装夹机械手上水平夹持的轮辋焊合件内,对正螺栓孔;
53.4.人工穿螺栓;
54.5.接着将龙门吊上的电磁铁挡盘器调整对应轮辋的尺寸,再将电磁铁挡盘器放入穿好螺栓的轮辋内,顶住螺栓头;
55.6.装夹机械手通过第一转动电机翻转180度;
56.7.人工将垫片放入螺栓内,并用电动小风炮上螺母,预紧;
57.8.第二转动电机带动装夹机械手将预紧好的半成品车轮旋转至螺栓紧固装置上方,升降电机带动装夹机械手下降,将半成品车轮放入螺栓紧固装置中进行定心和螺栓紧固,得到成品车轮;
58.9.第一夹持转移装置的装夹机械手回到初始位置;
59.10.第二夹持转移装置的装夹机械手抓取成品车轮并通过第一转动电机带动装夹机械手旋转至竖直位置,再通过第二转动电机带动装夹机械手将成品车轮旋转至气动控制溜槽的上方,升降电机带动装夹机械手下降,将成品车轮放到气动控制溜槽上;
60.11.气动控制溜槽将成品车轮送到自动升降机;
61.12.自动升降机将成品车轮抬升至指定高度,悬挂链挂钩机械手将成品车轮固定在悬挂链上,悬挂链将成品车轮送至后续工位。
62.第一电磁铁52用于磁吸的接触面由下至上向内倾斜,保证电磁铁能够顺利进入轮辋内部,并与轮辋内轮廓面贴合,完成磁吸。
63.驱动固定座111的下端面外缘设置有内齿轮117,内齿轮117与传动齿轮115啮合,用于辅助驱动固定座的旋转,使驱动固定座的旋转更加稳定。
64.机械手连接座103被丝杆112下端贯穿的位置设置有贯穿孔,贯穿孔内设置有丝母套件118和导向套119,丝杆112与丝母套件118螺纹连接,丝杆112能够在导向套119内自由旋转。丝母套件用于实现机械手连接座的升降,导向套保证升降的稳定性,采用上述结构,贯穿孔更易加工,降低了机械手连接座的制造难度。
65.两个第一水平杆42之间垂直固定有气缸固定杆48,气缸固定杆48上设置有伸缩气缸49,伸缩气缸49的伸缩杆斜向上且朝向溜槽来料方向。利用伸缩气缸的间歇性动作,根据后面工序的实际需求来控制溜槽的上料节奏,提高生产效率,防止物料堆积。
66.伸缩气缸49连接有电磁阀(图中未示出)和时间继电器(图中未示出),可以根据实
际需求设置伸缩气缸的动作间隔时间,实现自动控制,节省人力。
67.伸缩杆的端部设置有橡胶头410,橡胶头410与车轮接触时起缓冲作用,防止车轮表面有磕碰伤。
68.旋转支撑脚46的下端端部连接有带锁止结构的万向轮411,便于溜槽整机的转移。
69.本发明一种自动化车轮组装系统,通过多种机械结构的组合,实现轮辋焊合件与轮辐的输送、定位和拼装工作以及成品车轮的输送工作,操作人员只需完成组装预紧工作,节省了人力,提高了生产效率,消除了安全隐患。
70.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。