1.本发明属于水环境修复和治理领域,具体是涉及自驱动式固定化生物反应带复合生物浮床、矩阵系统及测控方法。
背景技术:
2.在自然条件下,河流夹带的冲积物和不同水生生物残骸经过水流搬运后会不断沉降在水流速度缓慢的湖泊底部,进而使湖泊演变为沼泽和陆地。然而,湖泊富营养化正加速这一原本缓慢的衰退过程。
3.通常,浮游植物所需的大量元素有c、o、n、p,光合作用和呼吸作用是浮游植物获取c、o的主要途径,而n、p无法直接获取。因此水体中的含n、p营养盐成了控制富营养化的主要因素。生物浮床是常用的原位生物修复技术,通常采用轻质床体搭载水生植物,通过植物根部的吸收、吸附作用将水体中含n、p营养盐从水体中转入生物相,从而达到净化水质的目的。
4.生物浮床经济实用、治污效果明显,不但可以改善动植物生长环境,有助于再造自然生态平衡,而且能起到消波护岸作用,进一步保护水利设施,同时可用于鱼塘水体种植无公害蔬菜,在打造花园城市、美丽乡村等领域有着重要作用。目前,对于生物浮床的研究热点主要集中在水生植物先锋种筛选和浮床材料和结构两部分,聚焦的都是单个浮床的性能提升。但在微生物作用强化、融合以及水域多个浮床联动协调方面仍然欠缺。
5.现有研究表明,微生物是全球氮磷循环的主要贡献者,利用微生物强化生物浮床对氮磷营养盐的去除效率将大大提高水质净化效果。同时,现有生物浮床通常无法自行驱动,一般为定点投放或随水流或风向漂浮,无法实现水域的精确分区处理,从而无法保障大水域湖泊的水质要求,使得效率低下。此外,在强风及以上气象条件下,生物浮床多有倾覆风险。综合以上,现有生物浮床在处理效果、精确水域治理、防倾覆等方面仍有不足。
技术实现要素:
6.针对现有技术中的不足与难题,本发明的目的在于提供自驱动式固定化生物反应带复合生物浮床、矩阵系统及测控方法。
7.为实现上述目的,本发明采用的技术方案是:
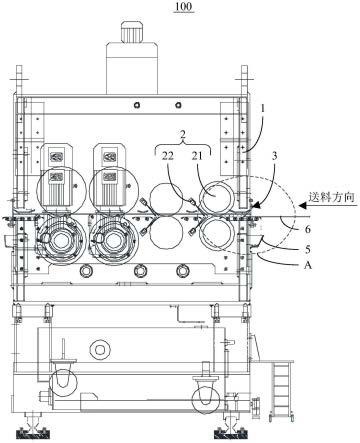
8.本发明提供了自驱动式固定化生物反应带复合生物浮床,包括决策模块、动力模块、感知模块、行进模块和工作模块,所述的工作模块包括轻态浮床;
9.所述的浮床床体边缘包括固定桅杆一、固定桅杆二、固定桅杆三、固定桅杆四、固定桅杆五、固定桅杆六;
10.所述的感知模块,包括水质传感器、气象传感器和位置传感器,其中水质传感器透过轻态浮床插入水体中;气象传感器固定在固定桅杆二上,可360
°
绕固定桅杆二旋转;位置传感器固定在轻态浮床中央;
11.所述的行进模块,包括浮力气囊、高压空气软管、高压空气软管卷轴、空气压缩泵、安全绳、安全绳卷轴、浮床稳定锚、动力螺旋桨、风帆一、风帆二、风帆三、风帆四、风帆五、风帆六、其中安全绳卷轴位于轻态浮床中央,通过数据线与分析控制器相连;高压空气软管轴卷位于轻态浮床中央;浮床稳定锚位于轻态浮床底部,通过安全绳缠绕于轻态浮床上的安全绳卷轴上;浮力气囊固定在浮床稳定锚底部,通过高压空气软管缠绕于轻态浮床上的高压空气软管卷轴上;空气压缩泵位于轻态浮床中央,通过高压空气软管与浮力气囊相连;动力螺旋桨固定于固定桅杆底端伸入水中,可360
°
绕固定桅杆旋转;风帆一、风帆二、风帆三、风帆四、风帆五、风帆六固定在固定桅杆上,开启时风帆左右上角行至桅杆顶端,关闭时风帆左右上角行至桅杆底端;
12.所述的工作模块包括植物、植物定植篮、固定化微生物处理带、复氧硬管、复氧软管、复氧软管卷轴、复氧喷头,其中植物通过植物定植篮呈辐射状固定于轻态浮床上;固定化微生物处理带呈手风琴状,上端固定于轻态浮床底部,下端固定于浮床稳定锚上;复氧软管卷轴固定于轻态浮床中央;复氧软管缠绕复氧软管卷轴后上端接复氧硬管、下端穿透轻态浮床后深入水体中;复氧硬管固定于轻态浮床中央,上端与复氧喷头连接,下端与复氧软管连接;
13.所述的动力模块,包括太阳能电池板和蓄电池,其中蓄电池固定在轻态浮床中央,太阳能电池板固定于固定桅杆上,可随光照角度变化调整太阳能面板与固定桅杆的角度使得接收光能最大,太阳能电池板通过电线与蓄电池相连;
14.所述的决策模块,包括无线通讯器和分析控制器,其中分析控制器固定在轻态浮床中央,通过数据线与无线通讯器、太阳能电池板、水质传感器、气象传感器、位置传感器、空气压缩泵、高压空气软管卷轴、安全绳卷轴、复氧软管卷轴、动力螺旋桨、风帆一、风帆二、风帆三、风帆四、风帆五、风帆六、复氧喷头相连。
15.进一步的,所述的固定化微生物处理带,由使用固定编绳依照竹席编织方法编制将依序排列的细长圆柱体状固定化微生物仓和电子受体/供体载体编制成带状组成,上下两条带状固定化微生物仓与中间一条带状电子受体/供体载体包裹形成“三明治”式固定化微生物处理带;固定化微生物仓和电子受体/供体载体可更换、可补充。
16.本发明还提供了自驱动式固定化生物反应带复合生物浮床矩阵系统,所述矩阵系统由多个上述的自驱动式固定化生物反应带复合生物浮床组成。
17.本发明还提供了上述的自驱动式固定化生物反应带复合生物浮床矩阵系统的测控方法,包括以下步骤:
18.s1,根据待处理水域的面积、水深和水质状况,确定自驱动式固定化生物反应带复合生物浮床矩阵系统中生物浮床数量,开启生物浮床电源,通过无线通讯给矩阵系统内各生物浮床赋编码a,并指定各生物浮床的初始目标位置b;
19.s2,根据水质目标,设定报警参数、运行参数、监测频率和数据采集分析周期,并调整固定桅杆二相对浮床中央为正东方向;记报警参数ph下限为ph
min
、ph上限为ph
max
、氨氮上限为nh
3-n
max
、溶解氧下限为do
min
、溶解氧上限为do
max
、风速上限vw
max
,记运行参数空气压缩泵排气时间为t
排
、空气压缩泵充气时间为t
充
、安全绳行进距离为deepth,矩阵系统内浮床间相对距离上限de;
20.s3,浮床进入行进模式,开启气象传感器,对风向和风速进行测定,记即时风向w
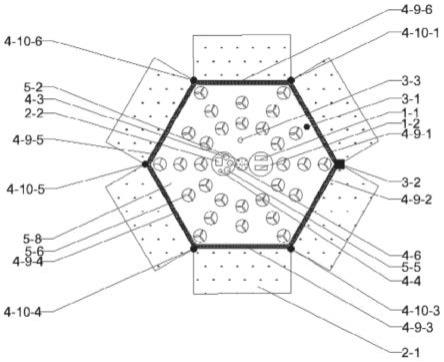
t
、
即时风速vw
t
,开启位置传感器测定生物浮床位置,记浮床即时位置为o;
21.s4,分析控制器判断初始目标位置b与即时位置o的相对关系,记相对方位角为α,记相对距离为d,以w
t
、vw
t
为关键参数,求解启动风帆序号和动力螺旋桨的行进参数,记动力螺旋桨行进角度a、浮床速度大小vm、风帆序号i;
22.s5,启动风帆i,启动动力螺旋桨,调整行进角度a至α,以速度vm朝初始目标位置b行进;
23.s6,重复步骤s4-s5,直至d<de,关闭风帆i和动力螺旋桨,开启空气压缩泵排出浮力气囊中的气体,经过t
排
后空气压缩泵关闭,安全绳卷轴、高压空气软管卷轴、复氧软管卷轴同步顺时针方向转动,浮床稳定锚下降;安全绳行进deepth后浮床稳定锚触底,安全绳卷轴、高压空气软管卷轴、复氧软管卷轴同步停止;
24.s7,浮床进入工作状态,开启水质传感器对水体ph、氨氮和溶解氧进行监测,记ph即时监测值ph
t
、氨氮即时监测值nh
3-n
t
、溶解氧即时监测值do
t
,通过无线通讯器向矩阵系统内生物浮床共享传感器数据;
25.s8,当do
t
<do
min
,复氧喷头开启,进入复氧状态,记浮床状态参数为ii,当do
t
>do
min
时,复氧喷头关闭,进入正常状态,记浮床状态参数为iii,各传感器监测数据转入存储,进入下一数据采集分析周期;
26.s9,当vw
t
>vw
max
,为防止浮床倾覆,浮床行进模式锁定无法进入,即刻保持工作模式;
27.s10,在vw
t
<vw
max
条件下,当ph
t
<ph
min
、ph
t
>ph
max
、nh
3-n
t
>nh
3-n
max
任一条件满足时,启动水质恶化报警,记状态参数为i,进入警报状态,报警浮床编号记为y,行进模式锁定无法进入:分析控制器分析矩阵系统内其他生物浮床的状态参数,并计算与状态参数为iii生物浮床的相对距离,记相对距离矩阵d,记相对距离最小的生物浮床为协助浮床x,向协助浮床发送协助指令,指定浮床y现状位置o为协助浮床x目标位置s;
28.s11,协助浮床x接收协助指令后,空气压缩泵开启向浮力气囊注入空气,经过t
充
后空气压缩泵关闭,安全绳卷轴、高压空气软管卷轴、复氧软管卷轴同步逆时针方向转动,浮床稳定锚上浮;安全绳行进deepth距离后浮床稳定锚上浮置顶,安全绳卷轴、高压空气软管卷轴、复氧软管卷轴同步停止;
29.s12,协助浮床x按照步骤s3-s6行进至目标位置s,进入工作模式,通过无线通讯器向矩阵系统内生物浮床共享各传感器数据;
30.s13,当报警浮床y水质参数ph
t
>ph
min
且ph
t
<ph
max
、nh
3-n
t
<nh
3-n
max
条件同时满足时,解除报警模式,进入工作模式;
31.s14,当协助浮床x水质参数ph
t
>ph
min
且ph
t
<ph
max
、nh
3-n
t
<nh
3-n
max
条件同时满足时,解除协助模式,赋予初始编号,按照步骤s4-s6返回初始设定位置b。
32.与现有技术相比,本发明有益效果是:
33.本发明致力于提升生物浮床在处理效果,整合了传统生物浮床和固定化微生物技术,以溶解氧、氨氮及ph为主要水质参数进行精确水域水环境治理,并以稳定锚提高生物浮床系统防倾覆性能,结合风向、风力的判断为生物浮床移动提供清洁能源从而达到节能目标,可实现矩阵系统内各生物浮床间的通讯和智能判断,构建出一套可移动的自驱动固定化生物反应带复合生物浮床智能矩阵系统。
附图说明
34.图1为本发明生物浮床工作模式下的主体结构示意图;
35.图2为本发明生物浮床行进模式下的主体结构示意图;
36.图3为本发明生物浮床的平面布置示意图;
37.图4为本发明生物浮床中固定化微生物处理带结构示意图;
38.图5为本发明系统的调控示意图。
39.图示说明:1-1为分析控制器、1-2为无线通讯器、2-1为太阳能电池板、2-2为蓄电池、3-1为水质传感器、3-2为气象传感器、3-3为位置传感器、4-1为浮力气囊、4-2为高压空气软管、4-3为高压空气软管卷轴、4-4为空气压缩泵、4-5为安全绳、4-6为安全绳卷轴、4-7为浮床稳定锚、4-8为动力螺旋桨、4-9-1为风帆一、4-9-2为风帆二、4-9-3为风帆三、4-9-4为风帆四、4-9-5为风帆五、4-9-6为风帆六、4-10-1为固定桅杆一、4-10-2为固定桅杆二、4-10-3为固定桅杆三、4-10-4为固定桅杆四、4-10-5为固定桅杆五、4-10-6为固定桅杆六、5-1为固定化微生物处理带、5-1-1为固定化微生物仓、5-1-2为电子受体/供体载体、5-1-3为固定编绳、5-2为复氧喷头、5-3为复氧硬管、5-4为复氧软管、5-5为复氧软管卷轴、5-6为植物、5-7为植物定植篮、5-8为轻态浮床、6为复合生物浮床i、7为复合生物浮床ii、8为复合生物浮床iii、9为复合生物浮床iv、10为污水管网渗漏点、11为渗漏污染羽边界。
具体实施方式
40.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步的详细说明。此处所描述的具体实施例仅用于解释本发明技术方案,并不限于本发明。
41.参照图5,自驱动式固定化生物反应带复合生物浮床矩阵系统,由多个自驱动式固定化生物反应带复合生物浮床组成。
42.参照图1-图3,单个自驱动式固定化生物反应带复合生物浮床主要包括决策模块、动力模块、感知模块、行进模块和工作模块。
43.所述的浮床床体边缘包括固定桅杆一4-10-1、固定桅杆二4-10-2、固定桅杆三4-10-3、固定桅杆四4-10-4、固定桅杆五4-10-5、固定桅杆六4-10-6。
44.所述的决策模块,包括无线通讯器1-2和分析控制器1-1,其中分析控制器1-1固定在轻态浮床5-8中央,通过数据线与无线通讯器1-2、太阳能电池板2-1、水质传感器3-1、气象传感器3-2、位置传感器3-3、空气压缩泵4-4、高压空气软管卷轴4-3、安全绳卷轴4-6、复氧软管卷轴5-5、动力螺旋桨4-8、风帆一4-9-1、风帆二4-9-2、风帆三4-9-3、风帆四4-9-4、风帆五4-9-5、风帆六4-9-6、复氧喷头5-2相连。
45.所述的动力模块,包括太阳能电池板2-1和蓄电池2-2,其中蓄电池2-2固定在轻态浮床5-8中央,太阳能电池板2-1固定于固定桅杆上,可随光照角度变化调整太阳能面板与固定桅杆的角度使得接收光能最大,太阳能电池板2-1分别通过电线和数据线与蓄电池2-2和分析控制器1-1相连。
46.所述的感知模块,包括水质传感器3-1、气象传感器3-2和位置传感器3-3,其中水质传感器3-1透过轻态浮床5-8插入水体中;气象传感器3-2固定在固定桅杆二4-10-2上,可360
°
绕固定桅杆二4-10-2旋转;位置传感器3-3固定在轻态浮床5-8中央。
47.所述的行进模块,包括浮力气囊4-1、高压空气软管4-2、高压空气软管卷轴4-3、空气压缩泵4-4、安全绳4-5、安全绳卷轴4-6、浮床稳定锚4-7、动力螺旋桨4-8、风帆一4-9-1、风帆二4-9-2、风帆三4-9-3、风帆四4-9-4、风帆五4-9-5、风帆六4-9-6、其中安全绳卷轴4-6位于轻态浮床5-8中央,通过数据线与分析控制器1-1相连;高压空气软管轴卷位于轻态浮床5-8中央,通过数据线与分析控制器1-1相连;浮床稳定锚4-7位于轻态浮床5-8底部,通过安全绳4-5缠绕于轻态浮床5-8上的安全绳卷轴4-6上;浮力气囊4-1固定在浮床稳定锚4-7底部,通过高压空气软管4-2缠绕于轻态浮床5-8上的高压空气软管卷轴4-3上;空气压缩泵4-4位于轻态浮床5-8中央,分别通过数据线和高压空气软管4-2与分析控制器1-1和浮力气囊4-1相连;动力螺旋桨4-8固定于固定桅杆底端伸入水中,可360
°
绕固定桅杆旋转,并通过数据线与分析控制器1-1相连;风帆一4-9-1、风帆二4-9-2、风帆三4-9-3、风帆四4-9-4、风帆五4-9-5、风帆六4-9-6固定在固定桅杆上,开启时风帆左右上角行至桅杆顶端,关闭时风帆左右上角行至桅杆底端。
48.所述的工作模块主要包括植物5-6、植物定植篮5-7、固定化微生物处理带5-1、复氧硬管5-3、复氧软管5-4、复氧软管卷轴5-5、复氧喷头5-2和轻态浮床5-8,其中植物5-6通过植物定植篮5-7呈辐射状固定于轻态浮床5-8上;固定化微生物处理带5-1呈手风琴状,上端固定于轻态浮床5-8底部,下端固定于浮床稳定锚4-7上;复氧软管卷轴5-5固定于轻态浮床5-8中央;复氧软管5-4缠绕复氧软管卷轴5-5后上端接复氧硬管5-3、下端穿透轻态浮床5-8后深入水体中;复氧硬管5-3固定于轻态浮床5-8中央,上端与复氧喷头5-2连接,下端与复氧软管5-4连接;复氧喷头5-2下接复氧硬管5-3并通过数据线与分析控制器1-1连接。
49.参照图4,所述的固定化微生物处理带5-1,由使用固定编绳5-1-3依照竹席编织方法编制将依序排列的细长圆柱体状固定化微生物仓5-1-1和电子受体/供体载体5-1-2编制成带状组成,上下两条带状固定化微生物仓5-1-1与中间一条带状电子受体/供体载体5-1-2包裹形成“三明治”式固定化微生物处理带5-1;固定化微生物仓5-1-1和电子受体/供体载体5-1-2可更换、可补充。
50.自驱动式固定化生物反应带复合生物浮床矩阵系统,其测控方法包括以下步骤:
51.(1)根据待处理水域的面积、水深和水质状况,确定自驱动式固定化生物反应带复合生物浮床矩阵系统中生物浮床数量,开启生物浮床电源,通过无线通讯给矩阵系统内各生物浮床赋编码a,并指定各生物浮床的初始目标位置b,以某城市湖泊-内湖为例,水域面积5.1公顷,平均水深4米,水质达到《地表水环境质量标准》(gb 3838-2002)中iv类标准,布置4台自驱动式固定化生物反应带复合生物浮床,编码分别为复合生物浮床i6、复合生物浮床ii7、复合生物浮床iii8、复合生物浮床iv9,以东和北分别为xy正方向,4台自驱动式固定化生物反应带复合生物浮床初始位置为点0(-3,-3),对应初始目标位置坐标分别为b1(-1,-1)、b2(0,0)、b3(2,2)、b4(-3,0);
52.(2)根据水质目标,设定报警参数、运行参数、监测频率和数据采集分析周期,并调整固定桅杆二4-10-2相对浮床中央为正东方向;记报警参数ph下限为ph
min
、ph上限为ph
max
、氨氮上限为nh
3-n
max
、溶解氧下限为do
min
、溶解氧上限为do
max
、风速上限vw
max
,记运行参数空气压缩泵4-4排气时间为t
排
、空气压缩泵4-4充气时间为t
充
、安全绳4-5行进距离为deepth,矩阵系统内浮床间相对距离上限de,内湖水质目标为iii类,设报警参数定ph
min
=6.0、ph
max
=9.0、nh
3-n
max
=1.0、do
min
=5.0、do
max
=6.0、vw
max
=14.0m/s,设运行参数t
充
=30s、t
排
=
15s,deepth=4m、de=5m;
53.(3)浮床进入行进模式,开启气象传感器3-2,对风向和风速进行测定,记即时风向w
t
、即时风速vw
t
,如w
t
为ne,vmt=10m/s,开启位置传感器3-3测定生物浮床位置,记浮床即时位置为o;
54.(4)分析控制器1-1判断初始目标位置b与即时位置o的相对关系,记相对方位角为α,记相对距离为d,以w
t
、vw
t
为关键参数,求解启动风帆序号和动力螺旋桨4-8的行进参数,记动力螺旋桨4-8行进角度a、浮床速度大小vm、风帆序号i;对于复合生物浮床i,ii=1,ai=45
°
,vmi=5m/s,对于复合生物浮床ii,i
ii
=1,a
ii
=45
°
,vm
ii
=5m/s,对于复合生物浮床iii,i
iii
=1,a
iii
=45
°
,vm
iii
=5m/s,对于复合生物浮床iv,i
iv
=6,a
iv
=90
°
,vm
iv
=7m/s;
55.(5)启动风帆i,启动动力螺旋桨4-8,调整行进角度a,以速度vm朝初始目标位置b行进;15min后复合生物浮床i、ii、iii、iv分别到达b1(-1,-1)、b2(0,0)、b3(2,2)、b4(-3,0);
56.(6)重复步骤(4)-(5),直至d<5m,15min后复合生物浮床i6、复合生物浮床ii7、复合生物浮床iii8、复合生物浮床iv9分别到达b1(-1,-1)、b2(0,0)、b3(2,2)、b4(-3,0);复合生物浮床i6、复合生物浮床ii7、复合生物浮床iii8分别关闭风帆一4-9-1和动力螺旋桨4-8,复合生物浮床iv9关闭风帆六4-9-6以及动力螺旋桨4-8,开启空气压缩泵4-4排出浮力气囊4-1中的气体,经过15s后空气压缩泵4-4关闭,安全绳卷轴4-6、高压空气软管卷轴4-3、复氧软管卷轴5-5同步顺时针方向转动,浮床稳定锚4-7下降;安全绳4-5行进4m后浮床稳定锚4-7触底,安全绳卷轴4-6、高压空气软管卷轴4-3、复氧软管卷轴5-5同步停止;
57.(7)浮床进入工作状态,开启水质传感器3-1对水体ph、氨氮和溶解氧进行监测,记ph即时监测值ph
t
、氨氮即时监测值nh
3-n
t
、溶解氧即时监测值do
t
,通过无线通讯器1-2向矩阵系统内生物浮床共享传感器数据,如图5(a),具体数据如下表所示;
58.生物浮床即时位置oph
t
nh
3-n
t
do
t
状态参数复合生物浮床i6(-1,-1)5.51.05.5i复合生物浮床ii7(0,0)6.50.955.3iii复合生物浮床iii8(2,2)7.00.903.1ii复合生物浮床iv9(-3,0)7.10.935.2iii
59.(8)对于复合生物浮床iii8,当do
t
=3.1<5.0,复氧喷头5-2开启,进入复氧状态,记浮床状态参数为ii,10min后,当do
t
=5.1>5.0时,复氧喷头5-2关闭,进入正常状态,记浮床状态参数为iii,各传感器监测数据转入存储,进入下一数据采集分析周期;
60.(9)当vw
t
>vw
max
,为防止浮床倾覆,浮床行进模式锁定无法进入,即刻保持工作模式,如对于复合生物浮床iv9,vw
t
=14.2>14.0,复合生物浮床iv9行进模式锁定;
61.(10)在vw
t
<vw
max
条件下,当ph
t
<ph
min
、ph
t
>ph
max
、nh
3-n
t
>nh
3-n
max
任一条件满足时,启动水质恶化报警,记状态参数为i,进入警报状态,报警浮床编号记为y,行进模式锁定无法进入:分析控制器1-1分析矩阵系统内其他生物浮床的状态参数,并计算与状态参数为iii生物浮床的相对距离,记相对距离矩阵d,记相对距离最小的生物浮床为协助浮床x,向协助浮床发送协助指令,指定浮床y现状位置o为协助浮床x目标位置s;如复合生物浮床i6、复合生物浮床ii7、复合生物浮床iii8所测vwt分别为8.5m/s、9.0m/s和6.5m/s,风向为ne,此时复合生物浮床i6测得ph
t
=5.5<6.0,进入警报状态,复合生物浮床i6编号记为y,行进
模式锁定无法进入,分析控制器1-1分析发现复合生物浮床ii7距离最近,将复合生物浮床ii7编号为x响应协助,目标位置s(-1,-1),如图5(b);
62.(11)协助浮床x,接收协助指令后,空气压缩泵4-4开启向浮力气囊4-1注入空气,经过30s后空气压缩泵4-4关闭,安全绳卷轴4-6、高压空气软管卷轴4-3、复氧软管卷轴5-5同步逆时针方向转动,浮床稳定锚4-7上浮;安全绳4-5行进4m后浮床稳定锚4-7上浮置顶,安全绳卷轴4-6、高压空气软管卷轴4-3、复氧软管卷轴5-5同步停止,如图5(c);
63.(12)协助浮床x调整动力螺旋桨至角度225
°
,vm=20m/s,按照步骤(3)-(6)行进至目标位置s(-1,-1),进入工作模式,通过无线通讯器1-2向矩阵系统内生物浮床共享各传感器数据;
64.(13)当报警浮床y水质参数ph
t
>ph
min
且ph
t
<ph
max
、nh
3-n
t
<nh
3-n
max
条件同时满足时,解除报警模式,进入工作模式,如协助浮床x,到达目标位置s(-1,-1)2天后,报警浮床y即复合生物浮床i6测得ph
t
=6.1、nh
3-n
t
=0.95,报警浮床y解除报警模式,编号重新赋值为复合生物浮床i6,进入工作模式;
65.(14)当协助浮床x水质参数ph
t
>ph
min
且ph
t
<ph
max
、nh
3-n
t
<nh
3-n
max
条件同时满足时,解除协助模式,赋予初始编号,按照步骤(4)-(6)返回初始设定位置b,如协助浮床x水质监测数据为ph
t
=6.1、nh
3-n
t
=0.95,风向wt为ne,vwt=10m/s,协助浮床x解除协助模式,赋予初始编号复合生物浮床ii7,调整动力螺旋桨方向为45
°
,vm=10m/s,按照(3)-(6)步返回初始位置b2(0,0),如图5(d)。
66.综上,本发明的自驱动式固定化生物反应带复合生物浮床矩阵系统,由多个复合生物浮床组成,所述复合生物浮床主要包括决策、动力、感知、行进和工作模块。决策模块分析参数并与阈值比对,若达到报警条件则发出警报并指示系统内浮床行进;动力模块通过太阳能电池板向蓄电池充电;感知模块采用水质、气象、位置传感器获得溶解氧、ph、氨氮、风向、风速、光强及角度、坐标参数;行进模块通过气囊、锚、安全绳卷轴决定浮床状态,螺旋桨、风帆电机改变浮床行进方向和速度;工作模块通过植物、固定化微生物反应带和复氧喷头改善水质;本发明可实现水质在线监测、污染事件远程警报、浮床智能部署,实现日常运营智能化。
67.以上所述仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。