1.本发明涉及安全监控技术领域,具体涉及一种施工现场安全风险识别报警方法。
背景技术:
2.建筑施工是指工程建设实施阶段的生产活动。建筑施工包括基础工程施工、主体结构施工、屋面工程施工、装饰工程施工等。施工作业的场所称为“建筑施工现场”或叫“施工现场”,也叫工地。建筑施工是一个技术复杂的生产过程,需要在有限的时间和一定的空间上进行着多工种工人操作。进行成百上千种材料的供应、各种机械设备的运行,必须要有科学的、先进的组织管理措施。其中安全管理是一项重要的工作。目前施工现场存在安全管理人员工作不到位,安全检查流于形式,使安全隐患不能全部的得到及时发现和排除。影响了施工现场的安全保障,造成施工事故隐患长时间存在。为此,有必要研究施工现场安全风险的识别和报警的技术,以保障施工现场的安全。
3.现有技术公开了一种施工安全监控预警方法及系统,其技术方案包括获取主受力杆件的实时状态数据,实时状态数据包括应力数据、应变数据、倾斜数据和沉降数据中的至少一种;将实时状态数据与预先设置的主受力杆件属性数据进行比较;当实时数据状态偏离属性数据时,向终端发送安全预警提示信息。将实时数据与预先设置的主受力杆件属性数据进行比较时,包括:预设属性数据的偏离值;计算实时状态数据偏离主受力杆件属性数据的实时偏离值;当存在至少一个实时偏离值偏离属性数据的偏离值时,向终端发送安全预警提示信息。其技术方案能够解决施工现场主受力杆出现安全隐患时的预警,但不能解决施工现场存在的其他安全风险的预警。
技术实现要素:
4.本发明所要解决的技术问题:目前缺乏施工现场安全风险监控方案的技术问题。提出了一种施工现场安全风险识别报警方法,能够对施工现场出现的安全风险进行识别和报警,帮助及时处置风险,保障施工现场安全。
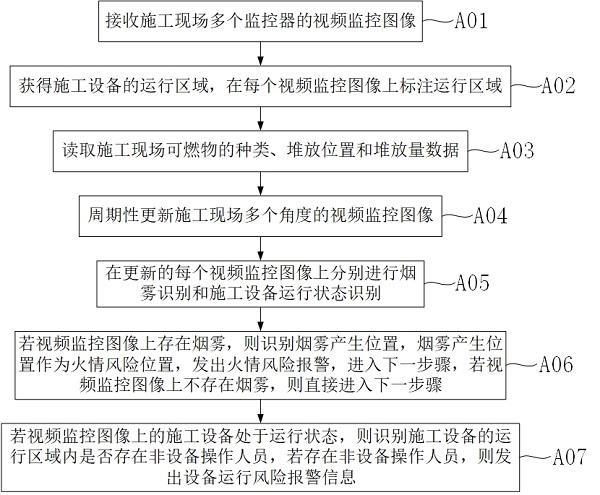
5.解决上述技术问题,本发明采用如下技术方案:一种施工现场安全风险识别报警方法,包括以下步骤:接收施工现场多个监控器的视频监控图像;获得施工设备的运行区域,在每个视频监控图像上标注所述运行区域;读取施工现场可燃物的种类、堆放位置和堆放量数据;周期性更新施工现场多个角度的视频监控图像;在更新的每个视频监控图像上分别进行烟雾识别和施工设备运行状态识别;若视频监控图像上存在烟雾,则识别烟雾产生位置,烟雾产生位置作为火情风险位置,发出火情风险报警,进入下一步骤,若视频监控图像上不存在烟雾,则直接进入下一步骤;若视频监控图像上的施工设备处于运行状态,则识别施工设备的运行区域内是否存在非设备操作人员,若存在非设备操作人员,则发出设备运行风险报警信息。
6.作为优选,进行烟雾识别的方法包括:提取视频监控图像中预设色彩范围的颜色区域;若所述颜色区域覆盖的像素面积超过预设的阈值,则判定视频监控图像中存在烟雾,反之,则判定视频监控图像中不存在烟雾。
7.作为优选,获得预设色彩范围的方法包括:读取若干个历史火情的烟雾图像;分别提取每个烟雾图像中烟雾的色彩范围;全部烟雾图像的色彩范围的并集构成预设色彩范围。
8.作为优选,获得预设色彩范围的方法包括:读取若干个历史火情的烟雾图像,将烟雾图像关联可燃物种类;剔除关联有多个可燃物种类的烟雾图像;分别提取剩余的每个烟雾图像中烟雾的色彩范围,将色彩范围关联可燃物种类;全部烟雾图像的色彩范围的集合,构成预设色彩范围。
9.作为优选,判断烟雾产生位置的方法包括:根据视频监控图像上的烟雾的色彩,获得对应的可燃物种类;与施工现场可燃物的种类比对,获得符合的可燃物种类的堆放位置,作为烟雾产生位置的推测位置;获得视频监控图像上的烟雾的像素分布区域,像素分布区域的底部作为烟雾产生位置的观测位置;所述推测位置和观测位置均作为火情风险位置。
10.作为优选,还包括识别烟雾覆盖面积的方法,在识别烟雾产生位置后,执行识别烟雾覆盖面积的方法,所述识别烟雾覆盖面积的方法包括:获得视频监控图像上的烟雾的像素分布区域,统计所述像素分布区域的像素面积s;根据烟雾产生位置和监控器的位置,获得烟雾产生位置和监控器的距离l;计算烟雾的覆盖面积c=k*s*l,k为预设系数;将覆盖面积c与预先设置的将覆盖面积与预设的风险等级划分方案比对,获得风险等级;所述火情风险报警包括火情风险位置和风险等级。
11.作为优选,所述风险等级划分方案包括若干个覆盖面积的数值区间和对应的风险等级,获得风险等级划分方案的方法包括:读取若干个标注火情等级的历史火情的烟雾图像;将烟雾图像按照火情等级分组;识别每组烟雾图像中的覆盖面积并计算均值,作为火情等级对应的覆盖面积;将相邻火情等级对应的覆盖面积的均值作为分界值,获得风险等级划分方案。
12.作为优选,施工设备运行状态识别的方法包括:读取施工设备多个工作姿态的图像模板,记为设备模板;将视频监控图像中运行区域内的图像与设备模板比对,获得施工设备的工作姿态;
获得连续的多个周期的视频监控图像中的施工设备的工作姿态;若连续的多个周期的视频监控图像中,施工设备的工作姿态不全部相同,则判定施工设备处于运行状态,反之,则判定施工设备处于非运行状态。
13.作为优选,非设备操作人员识别的方法包括:将视频监控图像中运行区域内的图像与设备模板比对,获得施工设备占据的区域,记为设备区域;在运行区域内识别人员,若人员位于设备区域外,则判定为非设备操作人员,反之,若人员位于设备区域内,则判定为设备操作人员。
14.作为优选,所述风险识别报警方法还包括可燃物火情预测方法,所述可燃物火情预测方法包括:获取施工现场的风向;根据烟雾产生位置和风向,依次判断施工现场的可燃物是否位于烟雾产生位置的下风口;若可燃物位于烟雾产生位置的下风口,则发出可燃物火情预警,所述可燃物火情预警包括可燃物种类、堆放位置和堆放量,若无可燃物位于烟雾产生位置的下风口,则不做操作。
15.本发明的有益技术效果包括:通过监控器获得的视频监控图像,结合烟雾识别,能够快速识别施工现场出现的烟雾,及时发现施工现场出现的火情;结合施工现场可燃物的堆放情况,识别出的烟雾产生位置,能够对火情下一步的发展提供预测,有助于制定火情处置方案;通过烟雾推测出可燃物的类型,帮助定位火情风险发生位置,并有助于火情的有效处置;通过识别施工设备的运行状态,识别施工设备工作区域的非设备操作人员,实现施工设备运行风险的识别和报警,保障施工设备的安全运行。
16.本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
附图说明
17.下面结合附图对本发明做进一步的说明:图1为本发明实施例全风险识别报警方法流程示意图。
18.图2为本发明实施例进行烟雾识别方法流程示意图。
19.图3为本发明实施例获得预设色彩范围方法流程示意图。
20.图4为本发明实施例关联可燃物种类方法流程示意图。
21.图5为本发明实施例判断烟雾产生位置方法流程示意图。
22.图6为本发明实施例识别烟雾覆盖面积方法流程示意图。
23.图7为本发明实施例获得风险等级划分方案方法流程示意图。
24.图8为本发明实施例施工设备运行状态识别方法流程示意图。
25.图9为本发明实施例非设备操作人员识别方法流程示意图。
26.图10为本发明实施例可燃物火情预测方法流程示意图。
具体实施方式
27.下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下
述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
28.在下文描述中,出现诸如术语“内”、“外”、“上”、“下”、“左”、“右”等指示方位或者位置关系仅是为了方便描述实施例和简化描述,而不是指示或暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
29.在介绍本实施例技术方案前,对本实施例的应用背景做介绍。本实施例技术方案用于施工现场的安全风险识别报警,用于提高施工现场的安全程度。施工现场主要指楼宇或专用建筑的施工现场,尤其是指天然气站建设施工或者改造施工,以及楼宇施工的装修阶段。这些施工现场存在较大的火情风险,同时还会使用到如大型吊车、推土机或者塔吊之类的施工设备。用于吊装专用的天然气存储或者输送设备,或者吊运装修物料。这些设备在运行过程中,也存在坠物伤人或者运动构建伤人的安全风险。
30.施工现场的管理是一项复杂的工作,施工现场的人员、物料、设备以及进行的活动不断变化,通过人员监管的方式,难以有效实现施工现场的管理。业内出现了通过现场安装监控器,拍摄现场的视频图像。同时在现场布设大量的传感器,如温度、湿度、风速及噪声等传感器,以期通过传感器获得施工现场出现的安全风险情况,及时发现安全风险并获得当前风险的状态以制定处置方案。但由于施工现场物料变化较快,风险可能发生的位置变化也较快。而且还需要对布设的传感器进行供电和故障维护等。当传感器发生故障时,更换传感器是一件耗费人力的任务。通过布设的固定传感器即存在布设工作量大,也存在风险识别缺乏针对性、识别率低的问题。
31.随着图像识别技术的发展,通过对现场监控图像的智能识别,不仅能够实现对物的识别,还能够实现对物的状态以及人员获得状态进行识别。图像识别技术为施工现场的安全管控提供了新的技术途径。被使用的图像识别技术主要有特征识别神经网络模型和图卷积神经网络模型,均属于神经网络模型的范畴。通过神经网络模型虽然能够获得施工现场的各类信息,如物品堆放位置、物品的种类、人员位置、人员活动状态、设备种类、设备工作状态、火焰区域及烟雾区域等,能够有效提高施工现场掌控程度,一定程度上有助于提高施工现场的安全程度。但借助神经网络模型技术存在以下不足:神经网络模型运行需要消耗大量的算力,对硬件提出了更多的要求;神经网络模型需要大量的素材进行训练,而素材的来源有限;当出现新的风险情况时,神经网络模型往往不能有效识别;还存在移植性较差的问题。这些不足导致借助神经网络模型识别,用于施工现场安全监控时,存在识别效率低和识别风险类型有限的问题。
32.为有效提高施工现场的安全水平,本实施例提供了通过监控器拍摄施工现场的视频监控图像,对视频监控图像进行色彩和模板匹配识别的方案,并结合施工现场堆放可燃物的相关信息,实现火情以及施工设备安全风险的识别和报警。并对风险的扩散情况做了预测,能够识别施工现场风险并及时报警,同时还能够提供风险的相关位置信息,帮助正确进行风险处置方案的制定和实施。
33.本实施例提供的一种施工现场安全风险识别报警方法,请参阅附图1,包括以下步骤:步骤a01)接收施工现场多个监控器的视频监控图像;步骤a02)获得施工设备的运行区域,在每个视频监控图像上标注运行区域;
步骤a03)读取施工现场可燃物的种类、堆放位置和堆放量数据;步骤a04)周期性更新施工现场多个角度的视频监控图像;步骤a05)在更新的每个视频监控图像上分别进行烟雾识别和施工设备运行状态识别;步骤a06)若视频监控图像上存在烟雾,则识别烟雾产生位置,烟雾产生位置作为火情风险位置,发出火情风险报警,进入下一步骤,若视频监控图像上不存在烟雾,则直接进入下一步骤;步骤a07)若视频监控图像上的施工设备处于运行状态,则识别施工设备的运行区域内是否存在非设备操作人员,若存在非设备操作人员,则发出设备运行风险报警信息。
34.通过色彩范围识别烟雾及烟雾区域,结合可燃物堆放的位置,能够基本的确定发生火情的可燃物种类和堆放位置,以及现场堆放的堆放量。火灾产生的烟雾颜色具有较为固定的范围,且与背景的颜色具有明显的区别。通过识别色彩范围,能够方便的提取出烟雾的范围。通常建筑工地出现的火灾的烟雾的颜色有白色、黑色和灰色。在极少情况下,当建筑工地堆放有有毒化学物质时,会产生彩色的烟雾,且以黄绿色居多。不过本实施例所指建筑工地通常为居民建筑或者办公建筑,通常不会出现大量可燃有毒的化学物料。当应用于承建化工厂设施的建筑工地时,需要根据实际建筑工地上存在的化学物料种类,获得其燃烧时的烟雾颜色。可燃物种类有助于正确的选择灭火措施,堆放位置有助于正确的安排人员疏散,并执行灭火措施。可燃物的堆放量,能够帮助确定后续火情的发展趋势。即如果堆放量较少,则火情将不会太大,若堆放量较多,则需要考虑随着时间的推移,火势将大幅增大的情况。通过识别施工设备的工作状态和运行区域内是否存在非设备操作人员,若存在非设备操作人员,则发出报警,提示施工设备运行时存在安全风险。
35.请参阅附图2,进行烟雾识别的方法包括:步骤b01)提取视频监控图像中预设色彩范围的颜色区域;步骤b02)若颜色区域覆盖的像素面积超过预设的阈值,则判定视频监控图像中存在烟雾,反之,则判定视频监控图像中不存在烟雾。火情产生的烟雾色彩具有规律可循。与发生火情的可燃物的种类有关。通常火情产生的烟雾从黑色到灰白色。而施工现场中,处于黑色至灰白色的色彩区域通常范围不大。很容易通过色彩范围提取出烟雾区域。在步骤b02)中,仅考虑属于烟雾的颜色区域进行像素面积判断。
36.再者烟雾会向上扩展,因此烟雾的色彩区域一定会到达从监控器视界的上边界。若未到达上边界,则不属于烟雾的色彩范围。据此,本实施例具体提供了提取视频监控图像中预设色彩范围的颜色区域的方法,包括:提取视频监控图像中色彩与预设色彩范围符合的全部色块区域;判断色块区域是否与视频监控图像的上边界接触,若色块区域与上边界接触,则判定色块区域属于烟雾的颜色区域,若色块区域不与上边界接触,则判定色块区域不属于烟雾的颜色区域。
37.请参阅附图3,获得预设色彩范围的方法包括:步骤c01)读取若干个历史火情的烟雾图像;步骤c02)分别提取每个烟雾图像中烟雾的色彩范围;步骤c03)全部烟雾图像的色彩范围的并集构成预设色彩范围。
38.通过读取历史火情的烟雾图像,能够获得烟雾的色彩范围,用于后续烟雾的识别。历史火情中可燃物的种类覆盖越多,则获得的预设色彩范围用于识别烟雾时就越准确。
39.可燃物的种类不同,所产生的烟雾颜色也不同。比如有白烟、黑烟、黑烟、彩色烟等。如表1所示,为烟雾颜色与火势关系表。
40.表1 烟雾颜色与火势关系表烟雾的颜色不仅能够反映火势,还能够反映可燃物的种类,具体而言:通常木材燃烧时,若空间较为充分,则燃烧的烟雾颜色为白色,若空间不充分,木材燃烧不充分,烟雾中会夹杂大量的碳粒而呈现黑色。而塑料等高分子材料燃烧时,通常产生黑色烟雾。若视频监控图像上识别出白色的烟雾,则表明燃烧还不剧烈,温度也较低。一段时间后,仍然为白色烟雾,则表明燃烧物为木材,或者已经有人员使用水灭火。若产生黑色的烟雾,则表明可燃物为有机高分子物料或者燃烧不充分的木材。有机高分子物料燃烧产生的烟雾毒性较强,燃烧不充分的木材则需要注意其中包含的一氧化碳。
41.仅根据烟雾颜色识别可燃物的方法,识别的准确度较低。仅在建筑工地上,木材或者有机高分子物料相距较远。监控器的视界范围内仅存在其中一种时,能够准确识别。为此本实施例提供了结合烟雾移动速度,更为准确识别火灾时燃烧可燃物种类的方案,包括:识别视频监控图像中烟雾的上升速率;根据烟雾的上升速率和烟雾的颜色,确定产生烟雾的可燃物种类。
42.另一方面,本实施例提供了识别视频监控图像中烟雾的上升速率的方法,包括:读取一帧视频监控图像,截取烟雾的部分区域图像;等待预设时长后,读取一帧视频监控图像,在新读取的视频监控图像中找到与所述部分区域图像相符的相符区域;计算相符区域相对部分区域图像的移动像素距离,将移动像素距离与预设时长的商作为烟雾的上升速率。
43.通过预设时长内,烟雾区域的移动距离判断烟雾的上升速率,需要截取的烟雾的部分区域图像内的图像变化较小。否则,在等待预设时长后,将无法找到相符区域。在火势较大时,烟雾翻滚较快,会导致上升速率的计算准确度降低。进一步的,本实施例还提供了另一种识别视频监控图像中烟雾的上升速率的方法,作为替代方法,包括:提取视频监控图像中预设色彩范围的颜色区域,作为烟雾区域;在预设时长内,周期性采集烟雾区域内每个像素点的像素值,获得每个像素点在不同时间的多个像素值;
计算每个像素点的多个像素值的方差,计算全部像素点的方差的均值;将均值与预设系数的乘积作为烟雾的上升速率。
44.通过计算烟雾区域内像素变化的快慢,来表征烟雾的上升速率,具有计算速度快,且计算准确度高的优点。通过预设的划分区间,将烟雾上升速率划分为慢和快两个区间。
45.当烟雾为白色,且上升速率慢时,表明燃烧物为木材等非高分子材质的物料,且燃烧不剧烈。当烟雾为白色且上升速率快时,表明燃烧物为木材、燃烧剧烈且燃烧充分。当烟雾为黑色且上升速度慢时,表明燃烧物为高分子材质的物料,且燃烧不剧烈。当烟雾为黑色且上升速度快时,表明燃烧物为高分子材质的物料且燃烧剧烈,或者为剧烈但不充分燃烧的木材。但烟雾颜色为灰色时,表明燃烧物为木材与高分子材质的物料的混合物。
46.另一实施例中,采用了不同的预设色彩范围获取方案。请参阅附图4,获得预设色彩范围的方法包括:步骤d01)读取若干个历史火情的烟雾图像,将烟雾图像关联可燃物种类;步骤d02)剔除关联有多个可燃物种类的烟雾图像;步骤d03)分别提取剩余的每个烟雾图像中烟雾的色彩范围,将色彩范围关联可燃物种类;步骤d04)全部烟雾图像的色彩范围的集合,构成预设色彩范围。
47.历史获取的烟雾图像不仅包括了烟雾的色彩信息,还包括了可燃物种类的信息,通过将烟雾图像关联可燃物种类,能够将色彩范围与可燃物种类关联。从而使可燃物种类能够被识别,为火情提供了更为丰富的报警信息。对于建筑工地而言,其可燃物种类并不多,通过历史火情的烟雾图像,进行提取即可获得针对建筑工地的可燃物识别准确度较高的预设色彩范围。
48.请参阅附图5,判断烟雾产生位置的方法包括:步骤e01)根据视频监控图像上的烟雾的色彩,获得对应的可燃物种类;步骤e02)与施工现场可燃物的种类比对,获得符合的可燃物种类的堆放位置,作为烟雾产生位置的推测位置;步骤e03)获得视频监控图像上的烟雾的像素分布区域,像素分布区域的底部作为烟雾产生位置的观测位置;步骤e04)推测位置和观测位置均作为火情风险位置。
49.通过识别烟雾的颜色范围,即可实现可燃物种类的推断。虽然实际火情下,可能存在多种同时燃烧的可燃物种类,产生的烟雾混合后颜色发生变化。但由于可燃物并不会总是混合堆放,因此产生的烟雾也不会完全的混合,在未混合的区域,仍然能够识别出可燃物种类。烟雾沿上升方向快速扩散,形成一种倒喇叭口的形状,通过识别烟雾在视频监控图像中的两侧边界,两侧边界的交点即为烟雾产生位置,也即可燃物的堆积点。
50.本实施例提供了通过识别烟雾底部的作为观测位置,同时结合可燃物在现场的堆放位置意见烟雾的颜色,将烟雾颜色符合的可燃物的堆放位置作为烟雾产生位置的推测位置。同时提供观测位置和推测位置作为火情风险位置,能够更好的处置火情。
51.另一方面,本实施例还提供了识别烟雾覆盖面积的方法,在识别烟雾产生位置后,执行识别烟雾覆盖面积的方法。请参阅附图6,识别烟雾覆盖面积的方法包括:步骤f01)获得视频监控图像上的烟雾的像素分布区域,统计像素分布区域的像素
面积s;步骤f02)根据烟雾产生位置和监控器的位置,获得烟雾产生位置和监控器的距离l;步骤f03)计算烟雾的覆盖面积c=k*s*l,k为预设系数;步骤f04)将覆盖面积c与预先设置的将覆盖面积与预设的风险等级划分方案比对,获得风险等级;步骤f05)火情风险报警包括火情风险位置和风险等级。
52.通过根据烟雾产生位置和监控器的位置,获得烟雾产生位置和监控器的距离l。距离l越大,同样的像素面积对应的烟雾覆盖面积就越大。因此采用步骤f03)提供的计算方法,能够更准确的计算出烟雾的覆盖面积。本实施例中计算出的烟雾覆盖面积并非烟雾的真实面积,仅将出现在监控器的监控视界内,在视频监控图像上的覆盖面积。通过视频监控图像上的覆盖面积来表征火情的大小。火势越大产生的烟雾越多,同时烟雾的上升速率也更快。
53.另一方面,本实施例还提供了通过烟雾的上升速率划分火情风险等级的方案。包括:提取视频监控图像中预设色彩范围的颜色区域,作为烟雾区域;在预设时长内,周期性采集烟雾区域内每个像素点的像素值,获得每个像素点在不同时间的多个像素值;计算每个像素点的多个像素值的方差,计算全部像素点的方差的均值;将均值与预设系数的乘积作为烟雾的上升速率。通过计算烟雾区域内像素变化的快慢,来表征烟雾的上升速率,具有计算速度快,且计算准确度高的优点。将方差的均值划分区间,每个区间对应一个风险等级即可。
54.具体的,本实施例中风险等级划分方案包括若干个覆盖面积的数值区间和对应的风险等级。请参阅附图7,获得风险等级划分方案的方法包括:步骤g01)读取若干个标注火情等级的历史火情的烟雾图像;步骤g02)将烟雾图像按照火情等级分组;步骤g03)识别每组烟雾图像中的覆盖面积并计算均值,作为火情等级对应的覆盖面积;步骤g04)将相邻火情等级对应的覆盖面积的均值作为分界值,获得风险等级划分方案。
55.通过对历史火情的烟雾图像进行标注,标注时,将历史火情的烟雾图像裁剪为与视频监控图像大小相符,能够使火情等级标注更加准确。通过制定分界值避免火情等级边界时,划分火情等级不够准确的问题。通过将相邻火情等级应的覆盖面积的均值作为分界值,能够借助历史数据,获得更好的分界值,划分出的火情等级更加科学。
56.请参阅附图8,施工设备运行状态识别的方法包括:步骤h01)读取施工设备多个工作姿态的图像模板,记为设备模板;步骤h02)将视频监控图像中运行区域内的图像与设备模板比对,获得施工设备的工作姿态;步骤h03)获得连续的多个周期的视频监控图像中的施工设备的工作姿态;
步骤h04)若连续的多个周期的视频监控图像中,施工设备的工作姿态不全部相同,则判定施工设备处于运行状态,反之,则判定施工设备处于非运行状态。
57.通过施工设备的工作姿态的图像模板,能够匹配出视频监控图像中施工设备的状态,在多个视频监控图像中,施工设备的状态若发生变化,则表示施工设备当前处于工作中,反之,若在多个视频监控图像中,施工设备的状态未发生变化,则表示施工设备当前处于非工作状态。如通过识别挖掘机的机械臂的多个姿态,来判断挖掘机当前是否处于工作状态中。若多个视频监控图像中,挖掘机的机械臂的姿态不同,则挖掘机处于工作状态。若多个视频监控图像中,挖掘机的机械臂的姿态相同,则挖掘机处于非工作状态。挖掘机处于非工作状态时,挖掘机的工作区域内不会存在安全风险。
58.请参阅附图9,非设备操作人员识别的方法包括:步骤i01)将视频监控图像中运行区域内的图像与设备模板比对,获得施工设备占据的区域,记为设备区域;步骤i02)在运行区域内识别人员,若人员位于设备区域外,则判定为非设备操作人员,反之,若人员位于设备区域内,则判定为设备操作人员。
59.当施工设备处于工作状态时,非设备操作人员应当远离。如挖掘机工作时,在挖掘机的工作范围内,应该无非设备操作人员,否则将存在安全风险。通过与设备模板比对能够获得设备的工作状态和位置,通过设备的位置和作业半径,即可获得施工设备占据的区域,即设备区域。
60.另一方面,在另外的实施例中,还提供了风险识别报警方法还包括可燃物火情预测方法,请参阅附图10,可燃物火情预测方法包括:步骤j01)获取施工现场的风向;步骤j02)根据烟雾产生位置和风向,依次判断施工现场的可燃物是否位于烟雾产生位置的下风口;步骤j03)若可燃物位于烟雾产生位置的下风口,则发出可燃物火情预警,可燃物火情预警包括可燃物种类、堆放位置和堆放量,若无可燃物位于烟雾产生位置的下风口,则不做操作。
61.通过网络获取气象数据,气象数据包括了施工现场的风向。识别施工现场的烟雾产生位置,若烟雾产生位置的下风口存在其他可燃物堆放,则堆放的可燃物将大概率被引燃,发生获取的蔓延。因此应及时的发出预警,提示制定针对的处置措施,进一步提高施工现场的安全。
62.综上,本实施例提供的技术方案所能取得的有益技术效果包括:通过监控器获得的视频监控图像,结合烟雾识别,能够快速识别施工现场出现的烟雾,及时发现施工现场出现的火情;结合施工现场可燃物的堆放情况,识别出的烟雾产生位置,能够对火情下一步的发展提供预测,有助于制定火情处置方案;通过烟雾推测出可燃物种类,帮助定位火情风险发生位置,并有助于火情的有效处置;通过识别施工设备的运行状态,识别施工设备工作区域的非设备操作人员,实现施工设备运行风险的识别和报警,保障施工设备的安全运行。
63.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。