1.本发明属于智能假肢领域,特别是涉及一种基于二叉树支持向量机的仿生手控制系统及方法。
背景技术:
2.智能仿生手是智能假肢领域一个重要的研究方向,依托于机器学习技术实现对截肢残端表面肌电信号的分类识别以及仿生手的运动控制,其对表面肌电信号的分类识别能力将直接影响智能仿生手的控制水平与穿戴体验。在智能仿生手开发过程中,需要深入考虑相关机器学习方法对生物表面肌电信号的分类识别准确率以及整体运算复杂度,它们将直接影响智能仿生手的质量以及成本。支持向量机(support vector machine,svm)机器学习算法,相比于其他算法,如贝叶斯算法,线性判别分析等往往具有更高的识别准确率。svm主要针对二分类问题,对于表面肌电信号多分类问题,svm常采用一类vs另一类的分类方法,然而随着类别数量的增加,需要训练的支持向量会急剧增加;svm一类vs其余类的分类方法,计算复杂度相比于前一种方法显著降低,但训练过程中存在两种类别间训练样本量严重不平衡问题,影响分类识别准确率。因此急需一种能够在保证识别准确率的情况下减少计算复杂度的表面肌电信号分类识别方法。
技术实现要素:
3.本发明的目的是提供一种基于二叉树支持向量机的仿生手控制系统及方法,以解决上述现有技术存在的问题。
4.为实现上述目的,本发明提供了一种基于二叉树支持向量机的仿生手控制系统及方法,包括:动作训练过程和实时控制过程;
5.其中,所述动作训练过程包括多动作离线训练和单一动作在线训练,通过对表面肌电信号采集、预处理和训练,得到训练完成的多维参数矩阵;
6.所述实时控制过程将所述多维参数矩阵载入,用于实现手势动作识别与仿生手实时控制。
7.可选的,所述多动作离线训练包括:
8.依据预先定义的多种手势动作,完成相关手势动作表面肌电信号的采集;在电脑端离线进行表面肌电信号的预处理、以及二叉树支持向量机模型的训练;训练完成后将二叉树支持向量机模型的多维参数矩阵输入至仿生手嵌入式控制系统平台。
9.可选的,在所述表面肌电信号采集前,需要进行预采集,所述预采集过程为:观察表面肌电信号波形,待每个动作波形相对稳定之后再进入正式采集。
10.可选的,所述表面肌电信号基于传感器采集,所述传感器采样频率均设置为1000hz,采样时间保持同步,每只传感器采样得到的样本数据量相同。
11.可选的,所述表面肌电信号的预处理过程为:截取相关手势的表面肌电信号,设定滑动时间窗为200ms,重叠参数为50%,分别对8只表面肌电传感器所采集的数据提取以下4
个时域特征:平均绝对值、斜率符号变化、过零率、波形长度,并将8只传感器提取的特征数据合并为一个32维的特征数据矩阵,用于后续二叉树支持向量机模型的训练。
12.可选的,所述二叉树支持向量机模型创建过程为:
13.依据专家先验知识,判断待识别手势动作基于表面肌电信号识别的难度,并基于二叉树的遍历思想,按照手势识别难度进行结合分组,将相关手势动作每次分为两组,逐级划分直至每一类手势动作均划分到不同的叶子结点,其中最易识别的组别位于二叉树根结点;将划分结果用于二叉树支持向量机模型训练。
14.可选的,所述二叉树支持向量机模型训练过程为:在二叉树支持向量机模型中进行多动作的离线训练,进行多动作的离线训练;利用相关手势动作的多维特征数据矩阵,依次训练每个根节点下面的两组手势动作,获得相应的支持向量机模型参数,并保存每个根节点训练获得的支持向量机模型参数;待各根节点均训练完成后,将每个结点对应的支持向量机模型参数合并为一个多维参数矩阵;将所述多维参数矩阵输入至仿生手嵌入式控制系统平台,用于后续手势动作的识别以及仿生手的实时控制。
15.可选的,所述单一动作在线训练包括:
16.进行自定义手势动作表面肌电信号的采集,嵌入式控制平台在线完成表面肌电信号的预处理、以及二叉树支持向量机模型的训练,训练完成后将模型的参数矩阵存储至仿生手嵌入式控制系统平台;
17.其中,所述单一动作在线训练中电信号采集和预处理工作与所述多动作离线训练相关工作相同。
18.可选的,所述实时控制过程具体包括:
19.训练完成的svm模型参数矩阵、以及相关手势动作的仿生手手指舵机驱动参数,并进行手臂表面肌电信号的实时采集与处理、手势动作的识别、以及仿生手实时控制。
20.本发明还提供了一种基于二叉树支持向量机的仿生手控制系统,所述控制系统包括支持向量机模型训练模块和仿生手实时控制模块,所述支持向量机模型训练模块和所述仿生手实时控制模块通过模型参数矩阵连接;
21.所述支持向量机模型训练模块,通过手臂表面肌电信号的采集、表面肌电信号的预处理、二叉树支持向量机模型的创建、二叉树支持向量机模型的训练、以及模型参数矩阵的存储,用于支持多动作离线训练模式和单一动作在线训练模式;
22.所述仿生手实时控制模块,通过svm模型参数的载入、表面肌电信号的实时采集与处理、手势动作的识别、以及仿生手的实时控制,用于支持多动作实时识别控制模式和单一动作实时识别控制模式。
23.本发明的技术效果为:
24.本发明支持多动作离线训练模式、单一动作在线训练模式、多动作实时识别控制模式、以及单一动作实时识别控制模式,能够在支持预先定义的多种手势动作的离线训练、分类识别与实时控制基础上,支持截肢用户自定义单一手势动作的在线训练、分类识别与实时控制。
附图说明
25.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实
施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
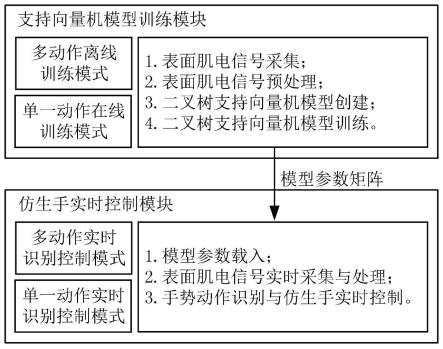
26.图1为本发明实施例中的一种基于二叉树支持向量机的仿生手控制系统的架构示意图;
27.图2为本发明实施例中的一种基于二叉树支持向量机的仿生手控制方法的基本流程图;
28.图3为本发明实施例中的一种基于二叉树支持向量机的仿生手控制方法的二叉树支持向量机模型示意图。
具体实施方式
29.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
30.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
31.实施例一
32.如图1所示,本实施例中提供一种基于二叉树支持向量机的仿生手控制系统,包括:svm模型训练模块和仿生手实时控制模块,其中svm模型训练模块支持多动作离线训练模式和单一动作在线训练模式,仿生手实时控制模块支持多动作实时识别控制模式和单一动作实时识别控制模式;
33.svm模型训练模块,支持多动作离线训练模式和单一动作在线训练模式两种模式,主要进行手臂表面肌电信号的采集、表面肌电信号的预处理、二叉树支持向量机模型的创建、二叉树支持向量机模型的训练、以及模型参数矩阵的存储。
34.仿生手实时控制模块,支持多动作实时识别控制模式和单一动作实时识别控制模式两种模式,主要进行svm模型参数的载入、表面肌电信号的实时采集与处理、手势动作的识别、以及仿生手的实时控制。
35.实施例二
36.在上述实施例的基础上,本发明还公开一种基于二叉树支持向量机的仿生手控制方法,如图2所示,包括:
37.步骤1:多动作离线训练。依据预先定义的多种手势动作,完成相关手势动作表面肌电信号的采集,并在电脑端离线进行表面肌电信号的预处理、以及二叉树支持向量机模型的训练,训练完成后将模型的多维参数矩阵下载至仿生手嵌入式控制系统平台;
38.步骤2:单一动作在线训练。截肢用户可根据实际需要,开启嵌入式控制平台单一动作训练模式,并进行自定义手势动作表面肌电信号的采集,嵌入式控制平台在线完成表面肌电信号的预处理、以及svm模型的训练,训练完成后将模型的参数矩阵存储至仿生手嵌入式控制系统平台;
39.步骤3:实时控制。依据截肢用户设置的工作模式,载入训练完成的svm模型参数矩阵、以及相关手势动作的仿生手手指舵机驱动参数,并进行手臂表面肌电信号的实时采集与处理、手势动作的识别、以及仿生手实时控制。
40.进一步地,步骤1包括:
41.步骤1.1:表面肌电信号采集。根据手臂肌群的生理学分布情况,将8只表面肌电传感器沿手臂圆周均匀布置,用于采集截肢用户不同手势动作下的手臂表面肌电信号;相关传感器采样频率均设置为1000hz,采样时间保持同步,每只传感器采样得到的样本数据量相同;采集的手势主要包括以下5种激活态手势:腕部内收、腕部外展、ok手势、抓握圆柱体、三指捏取以及1个放松态动作;正式采集表面肌电信号数据之前,需先进行预采集,观察表面肌电信号波形,待每个动作波形相对稳定之后再进入正式采集;正式采集表面肌电信号过程中,截肢用户想象截肢部位健在,并根据屏幕提示模仿做出屏幕中的手势动作,每个动作持续2s,每个动作重复5次,系统依次记录不同手势样本数据并对数据标注标签。
42.步骤1.2:表面肌电信号预处理。截取相关手势的表面肌电信号,设定滑动时间窗为200ms,重叠参数为50%,分别对8只表面肌电传感器所采集的数据提取以下4个时域特征:平均绝对值(mav)、斜率符号变化(ssc)、过零率(zc)、波形长度(wl),并将8只传感器提取的特征数据合并为一个32维的特征数据矩阵,用于后续svm模型的训练;
43.步骤1.3:二叉树支持向量机模型创建。依据专家先验知识,判断待识别手势动作基于表面肌电信号识别的难度,并基于二叉树的遍历思想,按照手势识别难度进行结合分组,将相关手势动作每次分为两组,逐级划分直至每一类手势动作均划分到不同的叶子结点,其中最易识别的组别位于二叉树根结点;依据划分结果,创建用于后续训练的二叉树支持向量机模型;二叉树支持向量机模型依据二叉树模型排列而成,每个根节点下面都有两个子结点,每个子结点对应一组类别,每个根节点对应一组判断子结点类别的支持向量;二叉树支持向量机模型,如图3所示;
44.步骤1.4:二叉树支持向量机模型训练。在电脑端根据创建的二叉树支持向量机模型,进行多动作的离线训练;利用相关手势动作的32维特征数据矩阵,依次训练每个根节点下面的两组手势动作,获得相应的svm模型参数,并保存每个根节点训练获得的svm模型参数;待各根节点均训练完成后,将每个结点对应的svm模型参数合并为一个多维参数矩阵;将多维参数矩阵下载至仿生手嵌入式控制系统平台,用于后续手势动作的识别以及仿生手的实时控制;
45.进一步地,步骤2包括:
46.步骤2.1:表面肌电信号采集。相关准备工作与权利要求2步骤1.1相同,在8只表面肌电传感器部署并设置完成后,用户开启单一动作在线训练模式;并根据嵌入式控制系统液晶界面提示信息,进行单一动作表面肌电信号的采集;截肢用户想象截肢部位健在,并根据提示做出想要定制识别的手势动作,持续2s,然后放松2s,动作重复5次,采集到的数据将被直接存储于嵌入式控制系统平台,并将激活态数据与放松态数据分别标注上“1”和
“‑
1”标签,用于后续svm模型的在线训练;
47.步骤2.2:表面肌电信号在线预处理。在线预处理工作与权利要求2
48.步骤1.2基本相同,相关工作在嵌入式控制系统平台上完成;主要工作为截取待识别定制手势动作的表面肌电信号,设定滑动时间窗,完成对8只表面肌电传感器所采集数据时域特征的提取,并构建定制动作32维的特征数据矩阵,用于后续svm模型的在线训练;
49.步骤2.3:svm模型在线训练。在嵌入式控制系统平台上,利用定制手势动作的32维特征数据矩阵完成svm模型的在线训练,并保存相应的svm模型参数矩阵,用于后续单一动作的识别以及仿生手的实时控制;
50.进一步地,步骤3包括:
51.步骤3.1:模型参数载入。依据用户在嵌入式控制系统平台设置的工作模式,载入相应的svm模型参数,同时载入相关手势动作的仿生手手指舵机驱动参数;若设置为多动作模式时,则载入权利要求3步骤1.4所训练的多维参数矩阵;若设置为单一动作模式时,则载入权利要求4步骤2.3所训练的参数矩阵;
52.步骤3.2:表面肌电信号实时采集与处理。8只表面肌电传感器在前臂部署完成后以1000hz频率采样;嵌入式控制系统以200ms滑动时间窗、50%重叠的窗口实时提取8只传感器的4个时域特征,并获得32维的特征数据矩阵,用于后续手势动作识别与仿生手实时控制;
53.步骤3.3:手势动作识别与仿生手实时控制。
54.将实时获得的32维特征数据矩阵输入训练好的svm模型,计算并辨识手势动作类别标签;根据标签决策仿生手舵机运动模式,实现仿生手实时控制。
55.综上,本发明针对现有的基于svm的一类vs另一类的分类方法存在计算量过高,难以应用于嵌入式智能假肢控制系统问题,本发明提出了一种基于二叉树支持向量机的仿生手控制系统及方法,通过增加专家先验知识,判断待识别手势动作基于表面肌电信号识别的难度,并构建基于二叉树的svm模型,在保证表面肌电信号分类识别准确率的情况下减少不必要的运算消耗,显著降低计算复杂度。
56.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。