一种基于小波分解与残差神经网络的船舶imo的检测方法
技术领域
1.本发明涉及目标检测领域,尤其是指基于小波分解与残差神经网络的船舶imo的检测方法及船舶识别方法。
背景技术:
2.船舶名称代码采用国际海事组织进行统一登记,全称是international maritime organization(以下简称imo),其规定的劳氏船舶登记号即是imo对应的编号。登记码结构作为船舶名称的主体代码结构,结合我国集装箱船舶在imo的登记情况加以分类。
3.目标检测是计算机视觉的重要研究领域之一,同时也是解决图像分割、场景理解、目标追踪、图像描述和事件检测等更高层次的视觉任务的基础。目标检测在人工智能和信息技术的许多领域都有广泛的应用,包括机器人视觉、消费电子产品、安保、自动驾驶、人机交互、基于内容的图像检索、智能视频监控和增强现实。当前目标检测的对象主要包括人、自行车、猫和狗等,对船舶imo的目标检测研究非常少,而船舶imo的检测又是海港口岸中无人机或无人船对在港指定船舶实现自动巡船监护的重要基础条件。不同于有明显界限物体的检测,例如人,车,猫,狗以及车牌等,针对船舶imo的检测没有明显的界限,且背景颜色多变,观测角度多变,这极大地增加了检测的难度。其原始图像中存在不同频率的特征信息,不同频率特征信息之间又存在信息干扰的问题,这使得现有的神经网路模型在图像特征信息的提取过程中,容易忽略一些重要的特征信息而导致识别率低下,根据现有sota(state-of-the-art)技术手段对船舶imo检测识别准确率较低,平均准确率仅为49.84%(根据实验平台的不同可能略有差距),查准率为80.10%,查全率为39.65%,而f1-score为59%,现有技术针对船舶imo的检测仍存在巨大的改进空间。使得船舶出入境管理部门不能通过无人机自动完成港区船舶的巡船监护。
4.在文献“mallat s g.a theory for multiresolution signal decomposition:the wavelet representation[j].ieee transactions on pattern analysis&machine intelligence,1989,11(4).”中,mallat提出了利用小波分析技术(小波变换)进行图像的分解与合成的工程实践,小波变换是从傅里叶变换优化改进而来,与傅里叶变换从整体的角度考虑信号的频谱特性不同,小波变换从较短的时间或空间内来分析信号的频谱特性,因此小波变换本质上是一种时-频或空-频分析方法。在文献“lin t y,goyal p,girshick r,et al.focal loss for dense object detection[j].ieee transactions on pattern analysis&machine intelligence,2017,pp(99):2999-3007.”中,lin等人提出了一种针对损失函数交叉熵的优化改进focal loss,用于提高不易分类样本的样本识别率,在该损失函数中设置了两个超参数α和β,通过调节两个超参数来降低易分类样本的权重,使深度学习模型能够偏重于一些不易分类的样本,进而提高模型的分类能力。在文献“zhou x,wang d,p krhenb
ü
hl.objects as points[j].2019.”中,zhou等人提出了一种先验框无关(anchor-free)的目标检测方法,相比于同类型方法具有更高的检测准确度,但是该方法主要用于多目标检测,且神经网络规模巨大,因此不利于针对单目标检测的工程应用,同时该
方法和以往的方法一样对输入图像信息的特征分析不够充分。基于此,本发明引入了一种基于小波分解和残差神经望楼的船舶imo的检测方法及其形成的船舶识别方法。
技术实现要素:
[0005]
为实现上述目的,本发明所提供的技术方案为:
[0006]
一种基于小波分解与残差神经网络的船舶imo的检测方法,其特征在于,包括以下步骤:
[0007]
1)利用小波技术对输入船舶imo图像进行小波分解并形成小波分解模块,获得输出特征图c0,
…
,c
j-1
;
[0008]
2)通过对步骤1)得出的特征图c0,
…
,c
j-1
中每一层进行卷积、加权平均等处理获得最终的特征图输出o0;同时形成残差神经网络模块;
[0009]
3)通过对步骤2)得出的o0进行反卷积,卷积,批标准化和激活操作完成输入图像船舶imo的检测识别。
[0010]
所述步骤1)采用如下公式获得输出特征图c0,
…
,c
j-1
:
[0011][0012][0013][0014][0015]
[0016][0017]
式中,l2(r)表示实数域上所有平方可积的函数集合,{{vj;j∈z};φ(x)}是l2(r)上的一个正交多分辨分析,{vj;j∈z}是l2(r)上的一列闭子空间的集合,φ(x)是l2(r)中满足正交多分辨分析的一个函数,是空间vj的标准正交基,wj为v
j 1
中vj的正交补,是空间wj的标准正交基,《
·
,
·
》表示两个函数在其定义域上的内积,hj(ω)和γj(ω)为小波技术对信号分解时的低通滤波器lpfj和高通滤波器hpfj的频率响应,j为正整数表示小波分解的当前层次,和为hj(ω)和γj(ω)的系数序列,和分别表示和的共轭复数,δ表示单位冲激函数,hj和γj为两个系数矩阵,矩阵的尺寸为n/2
×
n,n表示输入图像信号的宽和高,本发明中输入图像的宽和高相等,和表示hj和γj的共轭转置矩阵,caj表示输入图像信号,ca
j-1
,ch
j-1
,cv
j-1
,cd
j-1
分别表示caj经过小波分解的尺度分量、水平小波分量、垂直小波分量、对角小波分量,cat函数表示对矩阵进行拼接(或串联),c
j-1
表示经过矩阵拼接后的输出。
[0018]
所述步骤2)是对图像信号产生的小波分解c0,
…
,c
j-1
进行处理,对c
j-1
进行卷积,最大池化,批标准化和激活等操作获得一个特征图尺寸同c
j-2
相同但深度不同的输出o
j-1
,然后对c
j-2
进行卷积操作使其深度同o
j-1
相同,然后依照o
j-1
和c
j-2
在原图像信号中所占的比重对这两个输出进行加权平均,重复上述步骤直到输出o0。
[0019]
所述步骤2)采用的数学表达式如下:
[0020]
(n
in
×nin
×min
)*(k
×k×mout
)
s,p
=(n
out
×nout
×mout
)
ꢀꢀꢀ
(7)
[0021]nout
=floor[(n
in-k 2
×
p)/s 1]
ꢀꢀꢀ
(8)
[0022][0023][0024][0025]
式中,n
in
表示神经网络中当前输入特征图(隐层)的宽和高,m
in
表示输入特征图的深度,*表示卷积操作,k表示卷积核的尺寸,s表示卷积核对输入特征图进行卷积的步长,p表示对输入特征图的填充大小,n
out
表示神经网络中输出特征图的宽和高,函数floor表示向下取整,m
out
表示输出特征图的深度,xi表示第i个训练样本某个特征图中的某个神经元的取值,m表示训练样本数量,统计量和s2分别为该神经元在m个训练样本中取值的均值和方差的点估计,∈为一个大于零的常量避免分母为零,为xi标准正态化输出,为的修正输出,其中γ和β为修正中使用的超参数,relu为激活函数。
[0026]
所述步骤3)包括如下:
[0027]
采用步骤2)的输出进行上采样操作,获得特征图的宽高为n
in
/2,其n
in
表示原始图
像的宽高,深度为m
out
,且不小于16m
in
,m
in
表示原始图像的深度的输出,从该输出引出三个并联的特征图输入线路,第一条线路通过卷积,批标准化,激活等操作获得输出尺寸为n
in
/2
×nin
/2
×
1的特征图,特征图中的每一个神经元用于判断该神经元对应的图片位置内是否含有船舶imo,第二条线路通过卷积等操作获得输出尺寸为n
in
/2
×nin
/2
×
2的两层特征图,两层特征图中对应的神经元用于定位船舶imo所在原始图像的中心点位置,第三条线路通过卷积等操作获得输出尺寸为n
in
/2
×nin
/2
×
2的两层特征图,两层特征图中对应的神经元用于得出船舶imo在原始图像的宽度和高度,最后合并三条路线的信息来完成原始图像中船舶imo的定位。
[0028]
所述步骤3)采用的数学表达式如下实现:
[0029][0030][0031][0032]
式中,为反卷积时输入特征图的宽高,为反卷积时输出特征图的宽高,表示反卷积运算,sigmoid为激活函数,其他参数的定义同步骤2)。
[0033]
所述步骤1)获得输出特征图c0,
…
,c
j-1
,具体包括以下步骤:
[0034]
1.1)根据公式(1),可得以及vj分解后的各个正交子空间的标准正交基;
[0035]
1.2)根据公式(2),可得vj分解为v
j-1
和w
j-1
所使用滤波器的频率响应分别为hj(ω)和γj(ω),且根据两个滤波器输出的频率成分,可将hj(ω)和γj(ω)分别记为低通滤波器lpfj和高通滤波器hpfj的频率响应,同时得出两个频率响应的系数序列和
[0036]
1.3)根据公式(3),可得系数序列和之间约束关系;
[0037]
1.4)根据公式(4),可构造两个系数矩阵hj和γj,矩阵的尺寸为n/2
×
n,n表示输入图像信号的宽和高,本发明中输入图像的宽和高相等;
[0038]
1.5)根据公式(5),对输入图像信号caj进行分解,易得系数矩阵hj和γj的共轭转置和最后通过矩阵乘法运算即可获得caj的尺度分量、水平小波分量、垂直小波分量和对角小波分量,分别记为ca
j-1
,ch
j-1
,cv
j-1
,cd
j-1
;
[0039]
1.6)根据公式(6),当j》1时,对ch
j-1
,cv
j-1
,cd
j-1
进行矩阵拼接并输出c
j-1
,当j=1时,对ca0,ch0,cv0,cd0进行矩阵拼接并输出c0,最终输出特征图c0,
…
,c
j-1
。
[0040]
在步骤2)中,通过对特征图c0,
…
,c
j-1
中每一层进行卷积、加权平均等处理获得最终的特征图输出o0;包括以下步骤:
[0041]
2.1)根据公式(7)(8),对输入特征图c
j-1
进行卷积操作或者最大池化操作,卷积的次数可根据实际情况自定义,但是最终输出的特征图的宽和高同c
j-2
相同,深度可根据实际情况自定义,但是不能小于c
j-2
的深度,并将最终输出特征图记为o
j-1
;
[0042]
2.2)根据公式(9)(10)(11),对2.1)中每一次卷积结果进行批标准化和激活操作(默认为relu激活操作);
[0043]
2.3)根据公式(7)(8)(9)(10)(11),对c
j-2
进行卷积,批标准化和激活操作,输出的特征图尺寸同o
j-1
一样,然后根据c
j-1
和c
j-2
在原始输入图像中的比重对o
j-1
和经过操作后的c
j-2
进行加权平均;
[0044]
2.4)重复步骤2.1)2.2)2.3)直至输出o0。
[0045]
在步骤3)中,通过对o0进行反卷积,卷积,批标准化和激活操作完成输入图像船舶imo的检测识别;包括以下步骤:
[0046]
3.1)根据公式(9)(10)(11)(12)(13),对输入o0进行多次反卷积操作,反卷积的次数(记为k)可根据实际情况自定义,且每一次反卷积以后进行批标准化和激活操作,保证最终的输出特征图(记为o
j k-1
)的宽高为原图宽高的四分之一并向下取整,深度不小于原图深度的16倍;
[0047]
3.2)根据公式(7)(8)(9)(10)(11)(14),对o
j k-1
引出三条并联的线路,对第一条进行卷积,批标准化和激活操作,卷积次数根据实际情况自定义,获得宽高不变,深度为1的特征图,并对该特征图中的每一个神经元进行sigmoid激活,则激活后的每一个神经元用于判断该神经元对应的图片位置内是否含有船舶imo,然后对另外两条线路进行卷积,批标准化和激活操作,卷积次数根据实际情况自定义,获得宽高不变,深度为2的特征图,分别用于预测船舶imo的中心点位置和宽高,对第一个特征图采用focal loss进行神经网络参数学习,对另外两个特征图可通过l1绝对损失函数或者l2平方损失函数进行参数学习。
[0048]
一种如上述的基于小波分解与残差神经网络的船舶imo的检测方法形成的船舶登记号的识别方法。
[0049]
本发明与现有技术相比,具有如下优点与有益效果:
[0050]
1、基于小波分解与残差神经网络的船舶imo的检测方法,其检测或识别的结果重叠率不小于0.5,本检测方法预测的平均准确率分别为56.22%,查准率为83.33%,查全率为45.45%,。因此本发明的测量或识别的结果在平均准确率上提高6.38%,查准率上提高3.23%,查全率上提高5.8%,f1-score上提高6%;
[0051]
2、通过本发明方法对船舶imo的检测,使得船舶出入境管理部门可以通过无人机和视频监控自动完成港区船舶的巡船监护,从而提高警务效能。
附图说明
[0052]
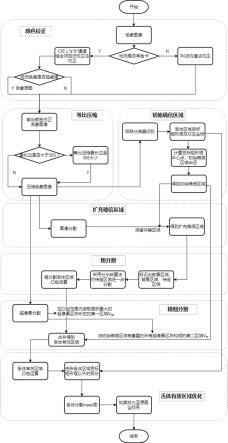
图1为本发明对船舶imo目标检测的整体运行框架图。
[0053]
图2为利用小波分析技术进行一次图像分解的流程图。
[0054]
图3为本发明针对具体输入图像的小波分解模块实现图。
[0055]
图4为本发明针对具体输入图像的残差神经网络模块实现图。
[0056]
图5为本发明针对具体输入图像的目标检测模块实现图。
具体实施方式
[0057]
下面结合具体实施例对本发明作进一步说明。
[0058]
如图1、图2、图3、图4和图5所示,本实施例所述的一种基于小波分解与残差神经网
络的船舶imo的检测方法,其具体情况如下:
[0059]
1)小波技术对输入船舶imo图像进行小波分解或小波分解模块构建
[0060]
主要利用小波技术对输入船舶imo图像进行小波分解,小波分解模块实现的数学表达式如下:
[0061][0062][0063][0064][0065][0066][0067]
式中,l2(r)表示实数域上所有平方可积的函数集合,{{vj;j∈z};φ(x)}是l2(r)上的一个正交多分辨分析,{vj;j∈z}是l2(r)上的一列闭子空间的集合,φ(x)是l2(r)中满足正交多分辨分析的一个函数,是空间vj的标准正交基,wj为v
j 1
中vj的正交补,是空间wj的标准正交基,《
·
,
·
》表示两个函数在其定义域上的内积,hj(ω)和γj(ω)为小波技术对信号分
解时的低通滤波器lpfj和高通滤波器hpfj的频率响应,j为正整数表示小波分解的当前层次,和为hj(ω)和γj(ω)的系数序列,和分别表示和的共轭复数,δ表示单位冲激函数,hj和γj为两个系数矩阵,矩阵的尺寸为n/2
×
n,n表示输入图像信号的宽和高,本发明中输入图像的宽和高相等,和表示hj和γj的共轭转置矩阵,caj表示输入图像信号,ca
j-1
,ch
j-1
,cv
j-1
,cd
j-1
分别表示caj经过小波分解的尺度分量、水平小波分量、垂直小波分量、对角小波分量,cat函数表示对矩阵进行拼接(或串联),c
j-1
表示经过矩阵拼接后的输出。
[0068]
假设caj的宽高为n,那么利用小波分析技术进行一次图像分解的流程(附图2)为:caj的每一行与lpfj进行卷积,然后保存卷积结果的偶数列,并输出尺寸为n
×
n/2的图像矩阵,该图像矩阵的每一列与lpfj进行卷积,保存卷积结果的偶数行并输出尺寸为n/2
×
n/2的尺度分量ca
j-1
,该图像矩阵的每一列与hpfj进行卷积,保存卷积结果的偶数行并输出尺寸为n/2
×
n/2的水平小波分量ch
j-1
;caj的每一行与hpfj进行卷积,然后保存卷积结果的偶数列并输出尺寸为n
×
n/2的图像矩阵,该图像矩阵的每一列与lpfj进行卷积,保存卷积结果的偶数行并输出尺寸为n/2
×
n/2的垂直小波分量cv
j-1
,该图像矩阵的每一列与hpfj进行卷积,保存卷积结果的偶数行并输出尺寸为n/2
×
n/2的对角小波分量cd
j-1
。如果输入的图像尺寸为n
×n×
3,那么就需要对每一层进行小波分解,并将各个分量对应的结果进行矩阵拼接来获得各个分量的输出。
[0069]
假设输入图像的具体尺寸为512
×
512
×
3,小波分解层次j=4,那么本发明的小波分解模块针对该图像的具体实施流程(附图3)为:通过小波分解获得尺寸为256
×
256
×
3的四个分量ca3、ch3、cv3、cd3,对分量ch3、cv3、cd3进行矩阵拼接获得尺寸为256
×
256
×
9的特征输出;对ca3进行小波分解获得尺寸为128
×
128
×
3的四个分量ca2、ch2、cv2、cd2,对分量ch2、cv2、cd2进行矩阵拼接获得尺寸为128
×
128
×
9的特征输出;对ca2进行小波分解获得尺寸为64
×
64
×
3的四个分量ca1、ch1、cv1、cd1,对分量ch1、cv1、cd1进行矩阵拼接获得尺寸为64
×
64
×
9的特征输出;对ca1进行小波分解获得尺寸为32
×
32
×
3的四个分量ca0、ch0、cv0、cd0,对四个分量进行矩阵拼接获得尺寸为32
×
32
×
12的特征输出;
[0070]
2)小波分解模块对图像信号产生的小波分解c0,
…
,c
j-1
进行处理或形成残差神经网络模块
[0071]
主要利用步骤1)小波分解模块对图像信号产生的小波分解c0,
…
,c
j-1
进行处理,对c
j-1
进行卷积,最大池化,批标准化和激活等操作获得一个特征图尺寸同c
j-2
相同但深度不同的输出o
j-1
,然后对c
j-2
进行卷积等操作使其深度同o
j-1
相同,然后依照o
j-1
和c
j-2
在原图像信号中所占的比重对这两个输出进行加权平均,重复上述步骤直到输出o0,残差神经网络模块实现的相关数学表达式如下:
[0072]
(n
in
×nin
×min
)*(k
×k×mout
)
s,p
=(n
out
×nout
×mout
)
ꢀꢀꢀ
(7)
[0073]nout
=floor[(n
in-k 2
×
p)/s 1]
ꢀꢀꢀ
(8)
[0074][0075]
[0076][0077]
式中,n
in
表示神经网络中当前输入特征图(隐层)的宽和高,m
in
表示输入特征图的深度,*表示卷积操作,k表示卷积核的尺寸,s表示卷积核对输入特征图进行卷积的步长,p表示对输入特征图的填充大小,n
out
表示神经网络中输出特征图的宽和高,函数floor表示向下取整,m
out
表示输出特征图的深度,xi表示第i个训练样本某个特征图中的某个神经元的取值,m表示训练样本数量,统计量和s2分别为该神经元在m个训练样本中取值的均值和方差的点估计,∈为一个大于零的常量避免分母为零,为xi标准正态化输出,为的修正输出,其中γ和β为修正中使用的超参数,relu为激活函数。
[0078]
为了更好地描述残差神经网络模块的实施流程,需要定义三个神经网络子模块(附图4)identity块,conv1卷积块和conv2卷积块,三个子模块的具体功能如下:
[0079]
identity块:特征图输入尺寸与输出尺寸大小相同,假设输入为x(尺寸n
×n×
m),则x的深度为m。首先对x进行卷积操作,卷积核1
×
1,卷积核的深度等于输入特征图的深度(下同),输出深度为m/4,则输出的特征尺寸为n
×n×
m/4,对输出进行批标准化操作(记为bn)和激活函数操作;然后进行卷积核为3
×
3和输出深度为m/4的卷积操作(记为3
×
3,m/4),并进行批标准化和激活操作(记为bn&relu);最后进行(3
×
3,m/4)卷积操作,同时进行bn处理,获得输出f(x)(尺寸n
×n×
m),将f(x) x的求和结果进行输出;
[0080]
conv1:卷积块输出特征图的深度为输入深度的4倍,宽高不变;
[0081]
conv2:卷积块对输入尺寸为n
×n×
m的特征图进行卷积,输出的结果为n/2
×
n/2
×
2m。
[0082]
用c3,c2,c1和c0表示由图3分解的尺寸分别为256
×
256
×
9,128
×
128
×
9,64
×
64
×
9和32
×
32
×
12的特征图,则本发明的残差神经网络模块针对这些特征图的具体实施流程(附图4)为:
[0083]
(1)对c3进行(3
×
3,64)的卷积操作和bn&relu操作,输出尺寸为256
×
256
×
64的特征图,再经过最大池化操作,池化核3
×
3,步长为2,输出深度为64,得到128
×
128
×
64的特征图,并进行bn操作,再经过conv1卷积块和2个identity块,得到128
×
128
×
256的特征图(记为o3);
[0084]
(2)对c2进行(3
×
3,256)的卷积操作和bn&relu操作,输出尺寸为128
×
128
×
256的特征图,并将其赋值给c2,易求出o3和c2在原信号中的比重分别为3/4和3/16,然后通过加权平均求出尺寸为128
×
128
×
256的特征图,经过conv2卷积块和3个identity块,得到64
×
64
×
512的特征图(记为o2);
[0085]
(3)对c1进行(3
×
3,512)的卷积操作和bn&relu操作,输出尺寸为64
×
64
×
512的特征图,并将其赋值给c1,易求出o2和c1在原信号中的比重分别为15/16和3/64,然后通过加权平均求出尺寸为64
×
64
×
512的特征图,经过conv2卷积块和5个identity块,得到32
×
32
×
1024的特征图(记为o1);
[0086]
(4)对c0进行(3
×
3,1024)的卷积操作和bn&relu操作,输出尺寸为32
×
32
×
1024的特征图,并将其赋值给c0,易求出o1和c0在原信号中的比重分别为63/64和1/64,然后通过加权平均求出尺寸为32
×
32
×
1024的特征图,经过conv2卷积块和2个identity块,得到16
×
16
×
2048的特征图(记为o0),并输出;
[0087]
3)形成目标检测模块
[0088]
主要利用步骤2)的输出进行上采样(本发明采用反卷积)操作,获得特征图的宽高为n
in
/2(n
in
表示原始图像的宽高),深度为m
out
(不小于16m
in
,m
in
表示原始图像的深度)的输出。从该输出引出三个并联的特征图输入线路,第一条线路通过卷积,批标准化,激活等操作获得输出尺寸为n
in
/2
×nin
/2
×
1的特征图,特征图中的每一个神经元用于判断该神经元对应的图片位置内是否含有船舶imo,第二条线路通过卷积等操作获得输出尺寸为n
in
/2
×nin
/2
×
2的两层特征图,两层特征图中对应的神经元用于定位船舶imo所在原始图像的中心点位置,第三条线路通过卷积等操作获得输出尺寸为n
in
/2
×nin
/2
×
2的两层特征图,两层特征图中对应的神经元用于得出船舶imo在原始图像的宽度和高度,最后合并三条路线的信息来完成原始图像中船舶imo的定位,目标检测模块的相关数学表达式如下:
[0089][0090][0091][0092]
式中,为反卷积时输入特征图的宽高,为反卷积时输出特征图的宽高,表示反卷积运算,sigmoid为激活函数,其他参数的定义同步骤2);
[0093]
本发明的目标检测模块针对由图4输出的特征图o0的具体实施流程(附图5)为:
[0094]
(1)对残差神经网络模块输出的特征图o0进行反卷积操作,反卷积核4
×
4,步长为2,填充不变,输出层数为512(简记为4
×
4,stride=2,516),然后进行bn&relu操作,输出尺寸为32
×
32
×
512的特征图(记为o4),对o4进行(4
×
4,stride=2,256)的反卷积和bn&relu操作,输出尺寸为64
×
64
×
256的特征图(记为o5),对o5进行(4
×
4,stride=2,64)的反卷积和bn&relu操作,输出尺寸为128
×
128
×
64的特征图(记为o6);
[0095]
(2)从o6引出三条并联线路,对第一条进行(3
×
3,64)卷积和bn&relu操作,以及(1
×
1,64)卷积和bn&relu操作,输出尺寸为128
×
128
×
1的特征图,并对该特征图中的每一个神经元进行sigmoid激活,则激活后的每一个神经元用于判断该神经元对应的图片位置内是否含有船舶imo,然后对另外两条线路进行(3
×
3,64)卷积和bn&relu操作,以及(1
×
1,64)卷积和bn&relu操作,输出两个尺寸为128
×
128
×
1的特征图,分别用于预测船舶imo的中心点位置和宽高。
[0096]
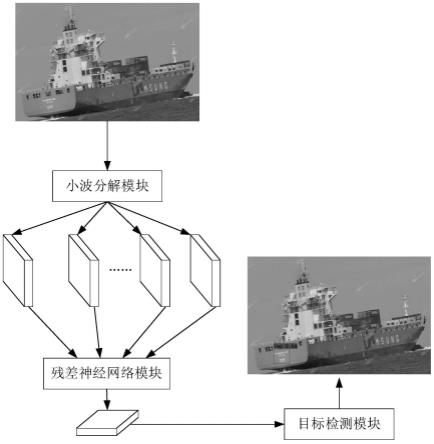
其首先利用小波分解模块对输入图像进行小波分解,分解出若干个层次(层次数目可依据实际情况自定义)的目标特征信息,每一个层次依照该层次在原始信号中所占的比重与残差神经网络模块中相应(相同的特征尺寸)特征层进行加权平均,并通过残差神经网络模块对结果进行编码处理,最后通过目标检测模块对编码结果进行解码和解耦处理,分离出三个用于检测imo的特征图,并通过这三个特征图的特征信息检测出船舶的imo。
[0097]
通过小波分解技术对输入图像进行分解,获取更多和更细致的图像特征信息,使得深度学习模型可以获得更多的图像输入信息进行学习;利用小波分解特定的公式步骤或模块可以提取不同频率的特征信息,同时与残差神经网络模块的特定公式步骤处理,从而避免原始图像中不同频率特征信息之间可能出现的干扰问题,最后供于船舶imo的检测,是针对海上环境、imo检测设计的,且能利用通过无人机或视频自动监控使用检测方法。
[0098]
通过在某市边检口岸和船讯网采集100余张船舶imo图片,同时借助图片增强技术生成2000张imo图片,其中1768张可用,选择1372张进行训练和验证,396张用于测试,设置预测结果的重叠率不小于0.5,实验结果显示现有sota算法预测的平均准确率为49.84%,查准率为80.10%,查全率为39.65%,f1-score为53%;本发明预测的平均准确率分别为56.22%,查准率为83.33%,查全率为45.45%,f1-score为59%。因此本发明的测量或识别的结果在平均准确率上提高6.38%,查准率上提高3.23%,查全率上提高5.8%,f1-score上提高6%;
[0099]
通过对船舶imo的检测,使得船舶出入境管理部门可以通过无人机和视频监控自动完成港区船舶的巡船监护,从而提高警务效能。
[0100]
以上所述实施例子只为本发明较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。