技术特征:
1.一种基于二叉树支持向量机的仿生手控制方法,其特征在于,包括动作训练过程和实时控制过程;其中,所述动作训练过程包括多动作离线训练和单一动作在线训练,通过对表面肌电信号采集、预处理和训练,得到训练完成的多维参数矩阵;所述实时控制过程将所述多维参数矩阵载入,用于实现手势动作识别与仿生手实时控制。2.根据权利要求1所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述多动作离线训练包括:依据预先定义的多种手势动作,完成相关手势动作表面肌电信号的采集;在电脑端离线进行表面肌电信号的预处理、以及二叉树支持向量机模型的训练;训练完成后将二叉树支持向量机模型的多维参数矩阵输入至仿生手嵌入式控制系统平台。3.根据权利要求2所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,在所述表面肌电信号采集前,需要进行预采集,所述预采集过程为:观察表面肌电信号波形,待每个动作波形相对稳定之后再进入正式采集。4.根据权利要求2所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述表面肌电信号基于传感器采集,所述传感器采样频率均设置为1000hz,采样时间保持同步,每只传感器采样得到的样本数据量相同。5.根据权利要求2所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述表面肌电信号的预处理过程为:截取相关手势的表面肌电信号,设定滑动时间窗为200ms,重叠参数为50%,分别对8只表面肌电传感器所采集的数据提取以下4个时域特征:平均绝对值、斜率符号变化、过零率、波形长度,并将8只传感器提取的特征数据合并为一个32维的特征数据矩阵,用于后续二叉树支持向量机模型的训练。6.根据权利要求2所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述二叉树支持向量机模型创建过程为:依据专家先验知识,判断待识别手势动作基于表面肌电信号识别的难度,并基于二叉树的遍历思想,按照手势识别难度进行结合分组,将相关手势动作每次分为两组,逐级划分直至每一类手势动作均划分到不同的叶子结点,其中最易识别的组别位于二叉树根结点;将划分结果用于二叉树支持向量机模型训练。7.根据权利要求6所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述二叉树支持向量机模型训练过程为:在二叉树支持向量机模型中进行多动作的离线训练,进行多动作的离线训练;利用相关手势动作的多维特征数据矩阵,依次训练每个根节点下面的两组手势动作,获得相应的支持向量机模型参数,并保存每个根节点训练获得的支持向量机模型参数;待各根节点均训练完成后,将每个结点对应的支持向量机模型参数合并为一个多维参数矩阵;将所述多维参数矩阵输入至仿生手嵌入式控制系统平台,用于后续手势动作的识别以及仿生手的实时控制。8.根据权利要求1所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述单一动作在线训练包括:进行自定义手势动作表面肌电信号的采集,嵌入式控制平台在线完成表面肌电信号的预处理、以及二叉树支持向量机模型的训练,训练完成后将模型的参数矩阵存储至仿生手
嵌入式控制系统平台;其中,所述单一动作在线训练中电信号采集和预处理工作与所述多动作离线训练相关工作相同。9.根据权利要求1所述的基于二叉树支持向量机的仿生手控制方法,其特征在于,所述实时控制过程具体包括:训练完成的svm模型参数矩阵、以及相关手势动作的仿生手手指舵机驱动参数,并进行手臂表面肌电信号的实时采集与处理、手势动作的识别、以及仿生手实时控制。10.一种基于二叉树支持向量机的仿生手控制系统,所述控制系统包括支持向量机模型训练模块和仿生手实时控制模块,所述支持向量机模型训练模块和所述仿生手实时控制模块通过模型参数矩阵连接,其特征在于,所述支持向量机模型训练模块,通过手臂表面肌电信号的采集、表面肌电信号的预处理、二叉树支持向量机模型的构建、二叉树支持向量机模型的训练、以及模型参数矩阵的存储,支持多动作离线训练模式和单一动作在线训练模式;所述仿生手实时控制模块,通过二叉树支持向量机模型参数的载入、表面肌电信号的实时采集与处理、手势动作的识别、以及仿生手的实时控制,用于支持多动作实时识别控制模式和单一动作实时识别控制模式。
技术总结
本发明公开了一种基于二叉树支持向量机的仿生手控制系统及方法,包括:动作训练过程和实时控制过程;其中,所述动作训练过程还包括多动作离线训练和单一动作在线训练,通过对表面肌电信号采集、预处理和训练,得到训练完成的参数矩阵;所述实时控制过程将所述参数矩阵载入,用于实现手势动作识别与仿生手实时控制。本发明支持多动作离线训练模式、单一动作在线训练模式、多动作实时识别控制模式、以及单一动作实时识别控制模式,能够在支持预先定义的多种手势动作的离线训练、分类识别与实时控制基础上,支持截肢用户自定义单一手势动作的在线训练、分类识别与实时控制。分类识别与实时控制。分类识别与实时控制。
技术研发人员:任雷 牛小茹 王坤阳 钱志辉 张定国 张尧
受保护的技术使用者:吉林大学
技术研发日:2022.10.21
技术公布日:2023/1/13
再多了解一些
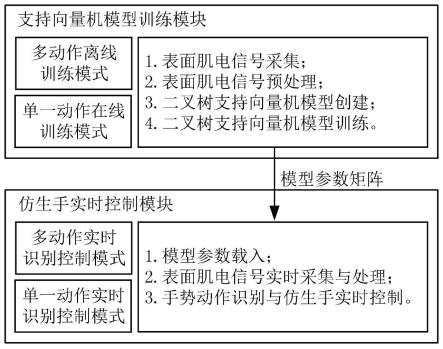
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。