xvyvzv下轴线的参数方程,并对位姿参数进行求解,
12.步骤5:改变3d眼镜或交互笔位置,重复步骤3-4,求解并记录至少10组轴线位姿参数;
13.步骤6:利用最优化方法求取所有轴线的交点坐标,即标志点在定位相机坐标系下的坐标;
14.步骤7:改变n次显示器上标志点的显示位置,重复n次步骤2~步骤6,得到多个标志点在显示器坐标系及定位相机坐标系下的坐标,根据立体解析几何理论,完成显示器坐标系和定位相机坐标系间位姿关系矩阵,即定位相机的安装参数。
15.所述步骤4的视觉系统坐标系o
v-xvyvzv下轴线的参数方程是:下轴线的参数方程是:i=1,2
…
m,p
i、
qi、ri为参数方程的系数。
16.所述步骤6标志点在定位相机坐标系下的坐标(x
v0
,y
v0
,z
v0
)的计算:建立以交点到所有轴线的距离和建立目标函数:其中其中利用l-m或其他最优化算法对(x
v0
,y
v0
,z
v0
)进行最优化求解。
17.所述步骤7得到定位相机的安装参数的计算:显示器坐标系和定位相机坐标系间位姿关系矩阵为[r
vd
|t
vd
],其中,r
vd
为3
×
3矩阵,为两坐标系的旋转关系,t
vd
为3
×
1向量,为两坐标系的平移关系;将多个标志点在显示器坐标系下的坐标值(x
di
,y
di
,z
di
),及其对应在定位相机坐标系下的坐标值(x
vi
,y
vi
,z
vi
)代入[x
vi
,y
vi
,z
vi
]
t
=r
vd
[x
di
,y
di
,z
di
]
t
t
vd
,利用最优化算法,即求解出定位相机和显示器坐标系间的位姿关系矩阵,即定位相机的安装参数。
[0018]
所述n次n≥3。
[0019]
所述m大于10。
[0020]
有益效果
[0021]
本发明提出的一种虚拟现实设备中定位相机安装参数的自标定方法,利用系统中3d显示器、3d眼镜或交互笔、视觉定位组件,无需借助外部标定设备,即可实现定位相机在系统中安装参数的标定。首先,在显示器上显示标志点并记录坐标位置,然后,基于视觉测量原理求解出该标志点在定位相机坐标系下的坐标,根据至少3组空间点在显示器坐标系和相机坐标系下的对应关系,即可实现定位相机在系统中安装参数的标定。该标定方法环境搭建便捷,无需专业人员及专业设备的协助,操作步骤简单,标定精度满足应用需求,增强了桌面级虚拟现实系统的实用性和可维护性。
[0022]
本发明充分结合桌面级虚拟现实系统特点,利用系统自身部件即可快速方便的完成定位相机安装参数的标定,增强了系统的实用性和可维护性。
附图说明
[0023]
图1是典型桌面级虚拟现实系统示意图。
[0024]
图2是显示器显示标志点示意图。
[0025]
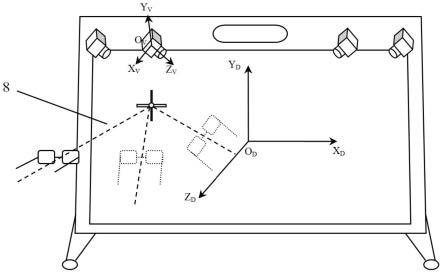
图3是基于3d眼镜的参数自标定示意图。
[0026]
图4是基于触笔的参数自标定示意图。
[0027]
其中,1. 3d显示器,2.相机,3. 3d眼镜,4.眼镜标志点,5.交互笔,6.交互笔标志点,7.显示器显示的标志点,8.眼镜视轴线,9.触笔轴线。
具体实施方式
[0028]
现结合实施例、附图对本发明作进一步描述:
[0029]
本发明提出的虚拟现实设备中定位相机安装参数自标定方法,主要是利用系统中的显示设备、3d眼镜或交互笔,无需借助外部设备,完成定位相机安装参数标定。通过在显示器上显示标志点,用户操作3d眼镜或交互笔,基于视觉测量理论,建立显示器坐标系和定位相机坐标系中若干空间点坐标的对应关系,进而完成显示器和定位相机坐标系间位姿参数的标定求解。
[0030]
结合图1所示的一款典型的桌面级虚拟现实系统,包含有3d显示器、3d眼镜、交互笔、以及4个相机组成的视觉定位组件,其中,3d眼镜和交互笔上布置有定位标志点。下面结合图3和图4具体阐述本发明提出的自标定方法。
[0031]
标定步骤如下:
[0032]
1.在显示器上显示一明显标志点,如图2所示,记录该点在显示器坐标系o
d-xdydzd下的坐标(x
d0
,y
d0
,z
d0
);
[0033]
2.操作者佩戴3d眼镜,改变头部姿态使视轴方向对准视显示器上的标志点,如图3所示,或者操作者操纵交互笔,使笔轴方向对准显示器上的标志点,如图4所示;
[0034]
3.利用视觉定位组件对眼镜的视轴线或交互笔轴线的位姿进行求解,得到视觉系统坐标系o
v-xvyvzv下轴线的参数方程;
[0035]
4.操作者移动3d眼镜或触笔位置,重复步骤2-3,记录多组不同位姿轴线的参数方程i=1,2
…
n,推荐n≥10,x
vi
、y
vi
、z
vi
、pi、qi、ri为空间直线方程参数;
[0036]
5.求解以上各轴线的交点坐标(x
v0
,y
v0
,z
v0
),即显示器标志点在定位相机坐标系下的坐标值,理论上交点(x
v0
,y
v0
,z
v0
)满足但由于存在测量误差,以交点到所有轴线的距离和建立目标函数:
[0037]
其中
[0038]
利用l-m或其他最优化算法对(x
v0
,y
v0
,z
v0
)进行最优化求解,轴线数越多,结果越精确;
[0039]
6.改变显示器上标志点的显示位置,重复上述步骤1-5,记录至少3组标志点在显示器坐标系下的坐标值(x
di
,y
di
,z
di
),及其对应在定位相机坐标系下的坐标值(x
vi
,y
vi
,z
vi
);设显示器坐标系和定位相机坐标系间位姿关系矩阵为[r
vd
|t
vd
],其中,r
vd
为3
×
3矩阵,描述了两坐标系的旋转关系,t
vd
为3
×
1向量,描述了两坐标系的平移关系;将上述坐标值代入[x
vi
,y
vi
,z
vi
]
t
=r
vd
[x
di
,y
di
,z
di
]
t
t
vd
,利用最优化算法,即可求解出定位相机和显示器坐标系间的位姿关系矩阵,即定位相机的安装参数,坐标对数越多,标定结果越精确。
[0040]
至此,系统参数自标定完成。
[0041]
以上所述,仅为本发明的一个具体实施例而已,并非用于限定本发明的保护范围,
凡在本发明的思想和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
