技术特征:
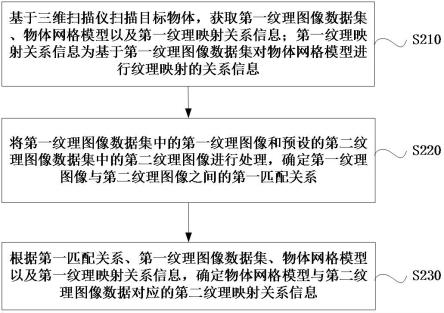
1.一种基于纹理映射的纹理图像前置置换方法,其特征在于,包括:基于三维扫描仪扫描目标物体,获取第一纹理图像数据集、物体网格模型以及第一纹理映射关系信息;所述第一纹理映射关系信息为基于第一纹理图像数据集对物体网格模型进行纹理映射的关系信息;将所述第一纹理图像数据集中的第一纹理图像和预设的第二纹理图像数据集中的第二纹理图像进行处理,确定所述第一纹理图像与所述第二纹理图像之间的第一匹配关系;根据所述第一匹配关系、所述第一纹理图像数据集、所述物体网格模型以及所述第一纹理映射关系信息,确定所述物体网格模型与所述第二纹理图像数据对应的第二纹理映射关系信息。2.根据权利要求1所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述第一纹理映射关系信息包括第一相机参数集和第一转换矩阵集;所述第一相机参数集为第一相机参数的集合;所述第一相机参数与所述第一纹理图像数据集中的第一纹理图像一一对应;所述第一转换矩阵集为在相机坐标系下的所述第一纹理图像与在世界坐标系下的物体网格模型之间的第一转换矩阵的集合。3.根据权利要求2所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述根据所述第一匹配关系、所述第一纹理图像数据集、所述物体网格模型以及所述第一纹理映射关系信息,确定与所述第二纹理图像数据对应的第二纹理映射关系信息,包括:根据第一特征集、所述第一转换矩阵集、所述物体网格模型以及所述第一相机参数集,确定与所述第一特征集中特征点对应的三维坐标集;所述三维坐标集在所述世界坐标系下;所述第一特征集为对所述第一纹理图像数据集中的每个第一纹理图像进行特征检测得到;以具有所述第一匹配关系的两幅纹理图像为一组,确定所述第二纹理图像与所述三维坐标集所在坐标系之间的第二转换矩阵,及与所述第二纹理图像对应的第二相机参数;遍历所有具有所述第一匹配关系的两幅纹理图像,集合对应的所述第二转换矩阵,得到第二转换矩阵集;集合对应的所述第二相机参数,得到第二相机参数集。4.根据权利要求3所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述根据第一特征集、所述第一转换矩阵集、所述物体网格模型以及所述第一相机参数集,确定与所述第一特征集中特征点对应的三维坐标集,包括:根据所述第一转换矩阵集和所述第一相机参数集,在各相机坐标系下构建所述三维扫描仪的相机光心至所述第一特征集中的每个特征点的射线;将所述物体网格模型转换到所述射线对应的相机坐标系下;以所述射线与所述物体网格模型的交点为筛选条件,确定与所述第一特征集中特征点对应的三维坐标集;基于所述第一转换矩阵集将所述三维坐标集转换到世界坐标系下。5.根据权利要求2所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述根据所述第一匹配关系、所述第一纹理图像数据集、所述物体网格模型以及所述第一纹理映射关系信息,确定与所述第二纹理图像数据对应的第二纹理映射关系信息,包括:根据第一特征集、所述第一转换矩阵集以及所述第一相机参数集,确定与所述第一特
征集中特征点对应的三维坐标集;所述第一特征集为对所述第一纹理图像数据集中的每个第一纹理图像进行特征检测得到;以具有所述第一匹配关系的两幅纹理图像为一组,确定所述第二纹理图像与所述三维坐标集所在坐标系之间的第三转换矩阵,及与所述第二纹理图像对应的第二相机参数;遍历所有具有所述第一匹配关系的两幅纹理图像,集合对应的所述第三转换矩阵,得到第三转换矩阵集;集合对应的所述第二相机参数,得到第二相机参数集;基于三维坐标集与物体网格模型所在坐标系之间的第四转换矩阵,对所述第三转换矩阵集中的第三转换矩阵进行处理,得到第二转换矩阵集。6.根据权利要求5所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述根据第一特征集、所述第一转换矩阵集以及所述第一相机参数集,确定与所述第一特征集中特征点对应的三维坐标集,包括:根据所述第一转换矩阵集和所述第一相机参数集,在各相机坐标系下对所述第一特征集中的每个特征点进行三维重建,确定与所述第一特征集中特征点对应的三维坐标集。7.根据权利要求1所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述第二纹理图像的分辨率比所述第一纹理图像的分辨率高。8.根据权利要求1所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述将所述第一纹理图像数据集中的第一纹理图像和预设的第二纹理图像数据集中的第二纹理图像进行处理,确定所述第一纹理图像与所述第二纹理图像之间的第一匹配关系,包括:对所述第一纹理图像数据集中的每个第一纹理图像进行特征检测,得到第一特征集;对所述第二纹理图像数据集中的每个第二纹理图像进行特征检测,得到第二特征集;对所述第一特征集和所述第二特征集进行特征匹配,确定所述第一纹理图像与所述第二纹理图像之间的第一匹配关系。9.根据权利要求7所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述方法还包括:在将所述第一纹理图像数据集中的第一纹理图像和预设的第二纹理图像数据集中的第二纹理图像进行处理之前,对所述第一纹理图像数据集和所述第二纹理图像数据集中的纹理图像进行相似度检测;筛选相似度大于相似度阈值的所述纹理图像作为处理的对象。10.根据权利要求1至权利要求9中任一项所述的基于纹理映射的纹理图像前置置换方法,其特征在于,所述方法还包括:利用纹理贴图算法,根据所述第二纹理图像数据集和所述第二纹理映射关系信息对所述物体网格模型进行纹理映射。11.一种基于纹理映射的纹理图像前置置换方法,其特征在于,包括:基于三维扫描仪扫描目标物体,获取物体网格模型、所述物体网格模型的模型皮肤展开图以及所述物体网格模型与所述模型皮肤展开图对应的第三纹理映射关系信息;将所述模型皮肤展开图和预设的第二纹理图像数据集中的第二纹理图像进行处理,确定所述模型皮肤展开图与所述第二纹理图像之间的第二匹配关系;根据所述第二匹配关系、所述模型皮肤展开图、所述物体网格模型以及所述第三纹理映射关系信息,确定所述物体网格模型与所述第二纹理图像数据对应的第二纹理映射关系
信息。12.一种基于纹理映射的纹理图像前置置换装置,其特征在于,包括:第一扫描模块、第一处理模块以及第一置换模块;所述第一扫描模块,用于基于三维扫描仪扫描目标物体,获取第一纹理图像数据集、物体网格模型以及第一纹理映射关系信息;所述第一纹理映射关系信息为基于第一纹理图像数据集对物体网格模型进行纹理映射的关系信息;所述第一处理模块,用于将所述第一纹理图像数据集中的第一纹理图像和预设的第二纹理图像数据集中的第二纹理图像进行处理,确定所述第一纹理图像与所述第二纹理图像之间的第二匹配关系;所述第一置换模块,用于根据所述第二匹配关系、所述第一纹理图像数据集、所述物体网格模型以及所述第一纹理映射关系信息,确定所述物体网格模型与所述第二纹理图像数据对应的第二纹理映射关系信息。13.一种计算机设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至权利要求11中任一项所述的基于纹理映射的纹理图像前置置换方法的步骤。14.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至权利要求11中任一项所述的基于纹理映射的纹理图像前置置换方法的步骤。
技术总结
本申请涉及一种基于纹理映射的纹理图像前置置换方法、装置和存储介质,其中,该方法包括:基于三维扫描仪扫描目标物体,获取第一纹理图像数据集、物体网格模型以及第一纹理映射关系信息;将第一纹理图像数据集中的第一纹理图像和预设的第二纹理图像数据集中的第二纹理图像进行处理,确定第一纹理图像与第二纹理图像之间的第一匹配关系;根据第一匹配关系、第一纹理图像数据集、物体网格模型以及第一纹理映射关系信息,确定物体网格模型与第二纹理图像数据对应的第二纹理映射关系信息。通过本申请,解决了存在后置处理运算复杂,对三维扫描仪的配置需求高,且处理效率低的问题,实现了自动完成纹理映射中纹理图像的前置置换,提高处理效率。高处理效率。高处理效率。
技术研发人员:王江峰 张立旦 何振贵 陈尚俭 郑俊
受保护的技术使用者:思看科技(杭州)股份有限公司
技术研发日:2022.11.29
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。