1.本发明涉及雷达标定技术领域,尤其涉及一种雷达接收机动态范围自动标定方法。
背景技术:
2.衡量一款雷达接收机性能好坏的指标多种多样,包括接收机动态范围、反射率、灵敏度、噪声系数等性能指标和标定方法,不同的性能指标,从不同的角度反应一款雷达接收机性能的好坏,但是一款雷达接收机的线性程度也是衡量该接收机的重要性能指标,因此,如何准确得到该指标,并且高度自动化的获取该指标,是现阶段需要考虑的问题。
3.需要说明的是,在上述背景技术部分公开的信息只用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点,提供了一种雷达接收机动态范围自动标定方法,解决了现有技术存在的不足。
5.本发明的目的通过以下技术方案来实现:一种雷达接收机动态范围自动标定方法,所述自动标定方法包括:步骤一、通过测试终端程控信号源设置输出信号的各个参数,并根据设置的步进值为间隔逐次采集,得到n组包括信号源功率和采集雷达终端采集信号功率的数据;步骤二、设置拟合曲线y=k1
×
x b1和多个中间变量,根据n组数据和中间变量计算出拟合曲线中的k1和b1,再将n组数据代入拟合曲线中得到的上拐点ph和下拐点pl,并根据上拐点ph和下拐点pl对应的功率计算出动态范围d。
6.所述通过测试终端程控信号源设置输出信号的各个参数包括:设置输出信号频率为fi,信号源功率为px,雷达终端采集的信号功率为py,待测雷达接收机线性度为l,待测雷达接收机灵敏度记为 pmin,接收机的饱和功率pmax,接收机的功率分辨率记为pr,信号源的输出功率精度为pa。
7.所述根据设置的步进值为间隔逐次采集,得到n组包括信号源功率和采集雷达终端采集信号功率的数据包括:开始标定后程控信号源频率保持fi不变,以步进为prdb设置信号源功率px在雷达终端采集功率py,得到n组数据,每组数据均包括px和py;注入的信号源功率px第一组数据px1满足px1= pmin pr ,且步进满足prdb 》 pr ,最终测试得出n组数据(px ,py)。
8.所述设置拟合曲线y=k1
×
x b1和多个中间变量,根据n组数据和中间变量计算出拟合曲线中的k1和b1包括:取最趋近于动态范围d值的rn组测试数据(px ,py),且每组测试数据汇总的py 满足pmin 《py 《pmax,此时测试第一组数据为(px1,py1),第二组数据为(px2,py2)
……
第rn组数据为(pxrn,pyrn);
通过公式mx =px1 px2 px3 px4 px5
…ꢀ
pxrn计算出中间变量mx;通过公式my =py1 py2 py3 py4 py5
…ꢀ
pyrn计算出中间变量my;通过公式mx x=(px1)
²
(px2)
²
( px3)
²
…ꢀ
(pxrn)
²
计算出中间变量mx x;通过公式mx y =(px1 py1) (px2 py2) ( px3 py3)
…ꢀ
(pxrn pyrn),计算出中间变量mx y;最后根据中间变量分别计算出k1 = (mx
×
my
ꢀ‑ꢀ
mx y
×
rn)/ mx
×
mx
‑ꢀ
mx x
×
rn,以及b1=(my
ꢀ‑ꢀ
mx
×
k1)/rn。
9.所述将n组数据代入拟合曲线中得到的上拐点ph和下拐点pl,并根据上拐点ph和下拐点pl对应的功率计算出动态范围d包括:通过理论推算以及实验验证可得,当实际测试中信号源产生功率 ,超过雷达最大饱和点pmax时和低于雷达接收机灵敏度pmin时, 雷达终端采集功率py和号源功率为px不在线性;将n组数据(px ,py)中px值代入拟合曲线y= k1x b1计算出n组y值记做pyn;信号产生功率在大于接收机饱和功率pmax时接收机实际采样的功率py小于理论功率pyn,当pyn
ꢀ‑ꢀ
py》3时对应的点记为(pxh ,pyh)该点定义为上拐点ph;信号产生功率在小于接收机灵敏度功率pmin时接收机实际采样的功率py大于理论功率pyn当pyl
ꢀ–ꢀ
py《-3时对应的(pxl ,pyl)点定义为下拐点pl;根据动态范围d= pxh
‑ꢀ
pxl计算出动态范围,其中,pxh为上拐点信号源输出功率,pxl为下拐点信号源输出功率值。
10.所述自动标定方法还包括数据展示步骤和绘图展示步骤;所述数据展示步骤包括:拟合斜率展示、动态范围展示、上拐点展示和下拐点展示;所述绘图展示步骤包括:通过绘制折线统计图的方式绘制出实际测试数据曲线和拟合曲线,实际测试数据曲线绘制时实际测试数据px作为横坐标,py作为纵坐标绘制一条曲线l1,拟合曲线绘制时横坐标共用px作为横坐标,通过y=k1x b1计算出纵坐标值绘制出拟合曲线图。
11.本发明具有以下优点:一种雷达接收机动态范围自动标定方法,通过程控word软件的方法,编制一份具备,被测雷达接收机原始数据,拟合曲线数据,动态范围,上拐点,下拐点,动态范围曲线图,测试结论等内容。方便查阅存档传输。
附图说明
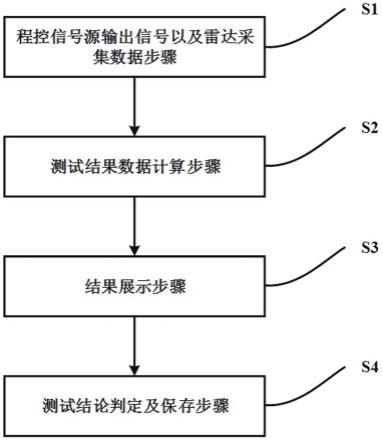
12.图1 为本发明的流程示意图。
具体实施方式
13.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下结合附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的保护范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得
的所有其他实施例,都属于本技术保护的范围。下面结合附图对本发明做进一步的描述。
14.如图1所示,本发明具体涉及一种雷达接收机动态范围自动标定方法,代替了人为控制信号源和记录数据,通过科学方法产生动态曲线图,拟合曲线斜率,上拐点,下拐点,动态范围等关键指标来衡量整个接收系统性能,自动输出测试结论;具体包括以下内容:s1、程控信号源输出信号以及雷达采集数据步骤:信号源输出信号注入雷达接收机前端,经雷达接收通道,数字信号处理,接收机终端软件等环节,终端软件计算出接收机接收的功率值。其中,使用射频线缆,连接信号源输出和雷达接收机前端,通过网线连接雷达终端电脑、测试终端(测试平台),设置网络在同一网段。
15.测试终端程控信号源输出信号频率为fi,信号源功率为px,雷达终端采集的信号功率为py,待测雷达接收机线性度为l,待测雷达接收机灵敏度记为 pmin(设置为固定值),接收机的饱和功率pmax,接收机的功率分辨率记为pr(设置为固定值),信号源的输出功率精度为pa(设置为固定值),标定过程与计算过程功率采用对数单位dbm。
16.开始标定后程控信号源频率保持fi不变,以步进为prdb设置信号源功率px在雷达终端采集功率py,得到n组数据,每组数据均包括px和py;注入的信号源功率px第一组数据px1满足px1= pmin pr ,且步进满足prdb 》 pr ,最终测试得出n组数据(px ,py)。
17.s2、测试结果数据计算步骤:接收机终端采集的信号py和接收机前端发送的信号px理论上满足py=kpx b关系。理论上k斜率等于1,b等于接收通道插损。通过采样统计发现信号在通过接收机通道,以及信号源本身的误差。
18.在实验测试过程中发现在接收机采集到小信号时,到达接收机灵敏度pmin时采集信号不再满足py=kpx b条件,在采集大信号时,到达接收机饱和功率pmax不再满足py =kpx b条件关系。把表征接收机能够接收的信号范围定义为动态范围d=pmax-pmin。
19.在实际测试结果中不是所有的py和px在一条曲线py=kpx b上,为了更精准的表述测试结果是误差原因还是接收机内部性能原因。从而模拟出一条曲线使所有的测试点尽可能多的落在该曲线上把该曲线叫做拟合曲线y=k1x b1。
20.其中,拟合曲线斜率k1、b1的计算过程如下所示:假设测试步进prdb=1db,测试点数n 》d,取最趋近于动态范围d值的rn组测试数据(px ,py),rn《 d,且每组测试数据汇总的py 满足pmin 《py 《pmax,此时测试第一组数据为(px1,py1),第二组数据为(px2,py2)
……
第rn组数据为(pxrn,pyrn);通过公式mx =px1 px2 px3 px4 px5
…ꢀ
pxrn计算出中间变量mx;通过公式my =py1 py2 py3 py4 py5
…ꢀ
pyrn计算出中间变量my;通过公式mx x=(px1)
²
(px2)
²
( px3)
²
…ꢀ
(pxrn)
²
计算出中间变量mx x;通过公式mx y =(px1 py1) (px2 py2) ( px3 py3)
…ꢀ
(pxrn pyrn),计算出中间变量mx y;最后根据中间变量分别计算出k1 = (mx
×
my
ꢀ‑ꢀ
mx y
×
rn)/ mx
×
mx
‑ꢀ
mx x
×
rn,以及b1=(my
ꢀ‑ꢀ
mx
×
k1)/rn。
21.其中,上拐点ph和下拐点pl的计算过程如下所示:将n组数据(px ,py)中px值代入拟合曲线y= k1x b1计算出n组y值记做pyn;
信号产生功率在大于接收机饱和功率pmax时接收机实际采样的功率py小于理论功率pyn,当pyn
ꢀ‑ꢀ
py》3时对应的点记为(pxh ,pyh)该点定义为上拐点ph;信号产生功率在小于接收机灵敏度功率pmin时接收机实际采样的功率py大于理论功率pyn当pyl
ꢀ–ꢀ
py《-3时对应的(pxl ,pyl)点定义为下拐点pl;根据动态范围d= pxh
‑ꢀ
pxl计算出动态范围,其中,pxh为上拐点信号源输出功率,pxl为下拐点信号源输出功率值。
22.s3、结果展示步骤:其包括数据展示步骤和绘图展示步骤;所述数据展示步骤包括:拟合斜率展示、动态范围展示、上拐点展示和下拐点展示;进一步地,绘图展示步骤包括:通过绘制折线统计图的方式绘制出实际测试数据曲线和拟合曲线,实际测试数据曲线绘制时实际测试数据px作为横坐标,py作为纵坐标绘制一条曲线l1,拟合曲线绘制时横坐标共用px作为横坐标,通过y=k1x b1计算出纵坐标值绘制出拟合曲线图。
23.s4、测试结论判定及保存步骤:通过判定拟合斜率,动态范围,上拐点,下拐点等值来衡量被测雷达接收系统的指标。通过程控操作word软件把测试数据,拟合曲线数据,上拐点,下拐点,拟合曲线斜率,动态范围,拟合曲线和测试数折线图等写入word文档中。生成word文档具备保存打印传阅存档等优点。
24.以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。