1.本发明涉及卸货、消毒和码垛技术领域,具体而言是一种集装箱内货物自动抓取卸货消毒和码垛作业线及方法。
背景技术:
2.在全球物流运输行业,冷链集装箱作为各类需低温储藏食品转移运输的主要载体,承载了大量的铁路和远洋物流任务,而在物流运输过程中,卸货和码垛的效率是限制物流速度的重要原因,但目前货物的装卸多采用人工搬运方式,劳动强度大且效率低。而且对于进口冷链货物,在卸货时还需要增加货物的六面消毒过程。因此,为提升集装箱冷链货物卸货、消毒和码垛作业的自动化和智能化水平,亟待开发冷链集装箱纸盒装货物智能化卸货消毒码垛作业线。
3.对于冷链集装箱内货物货物的卸货、消毒和码垛技术,从目前的技术难点来说,需求最大、技术难度最大的是纸盒装货物的自动化卸货技术,国内几乎没有成熟的自动化卸货设备和技术,国外也鲜有此类技术的成熟应用。而对于纸盒装货物自动化和智能化卸货、消毒和码垛技术的集成作业线的研究更是少之又少。
4.如何提高冷链集装箱内货物卸货、消毒和码垛的自动化和智能化水平,减少企业人力成本和工人的劳动强度,降低货物表面可能存在的病毒。研制智能、高效、安全的冷链集装箱纸盒装货物卸货、消毒和码垛集成作业线,对提高冷链集装箱物流高质量发展具有重要意义。
技术实现要素:
5.根据上述技术问题,而提供一种集装箱内货物自动抓取卸货消毒和码垛作业线及方法。
6.本发明采用的技术手段如下:
7.一种集装箱内货物自动抓取卸货消毒和码垛作业线,包括:
8.自主行进式集装箱内纸盒装货物自动抓取卸货装置,用于抓取货物,并将货物放置在可接续电动伸缩托辊组;
9.所述可接续电动伸缩托辊组,其头端与所述自主行进式集装箱内纸盒装货物自动抓取卸货装置连接,用于传递货物;
10.自动化消毒装置,其头端与所述可接续电动伸缩托辊组的尾端连接,用于对所述可接续电动伸缩托辊组传递来的货物进行自动化消毒,并将货物传递至出货托辊组;
11.所述出货托辊组,其头端与所述自动化消毒装置的尾端连接,用于传递货物;以及,
12.机器人自动化码垛系统,其与所述出货托辊组的尾端连接,用于抓取所述出货托辊组上的货物,并将其码垛。
13.优选地,所述自主行进式集装箱内纸盒装货物自动抓取卸货装置包括运动系统、
抓取系统和视觉识别系统和电动伸缩托辊机构;所述视觉检测系统对货物进行扫描识别,判断货物的位置并给出运动控制指令,驱动所述运动系统使所述抓取系统到达指定位置,所述抓取系统将货物抓取并放在所述电动伸缩托辊机构上,所述电动伸缩托辊机构的尾部与所述可接续电动伸缩托辊组的头端连接。
14.优选地,所述运动系统包括在水平方向上沿x向纵向移动的电动行走平台车、x向水平纵向移动机构、y向水平横向移动机构、回转机构、z向垂直升降机构和z向垂直辅助升降机构;所述抓取系统包括垂直抓取吸盘机构和水平抓取组合吸盘机构;
15.所述x向水平纵向移动机构的安装端安装在所述电动行走平台车上,其输出端沿x向水平纵向运动;
16.所述y向水平横向移动机构的安装端安装在所述x向水平纵向移动机构的输出端上,所述y向水平横向移动机构的输出端沿y向水平横向移动;
17.所述回转机构的安装端安装在所述y向水平横向移动机构的输出端上,且其输出端围绕其z向中心轴线转动;
18.所述z向垂直升降机构的安装端安装在所述回转机构的输出端上,其输出端沿z向方向竖直运动;
19.z向垂直辅助升降机构的安装端安装在所述z向垂直升降机构的输出端上,其输出端沿z向方向竖直运动;
20.所述垂直抓取吸盘机构安装在所述z向垂直辅助升降机构的输出端上,实现对中下部货物的抓取;所述水平抓取组合吸盘机构位于所述垂直抓取吸盘机构的上方,并安装在所述z向辅助升降机构的输出端上,实现对上部货物的抓取;
21.所述电动伸缩托辊机构的固定端安装在所述电动行走平台车的尾端,与所述可接续电动伸缩托辊组的头端相对,且其伸缩端在水平方向上沿x向伸缩。
22.优选地,所述z向垂直辅助升降机构包括第一辅助升降机构和第二辅助升降机构,所述第一辅助升降机构、所述第二辅助升降机构和所述z向垂直升降机构构成紧凑型三轴平行叠加联动垂直位移装置;
23.所述第一辅助升降机构的安装端安装在所述z向垂直升降机构的输出端,其输出端沿z向方向竖直运动;
24.所述第二辅助升降机构的安装端安装在所述第一辅助升降机构的输出端,其输出端沿z向方向竖直运动;
25.所述水平抓取组合吸盘机构和所述垂直抓取吸盘机构均安装在所述第二辅助机构的输出端上。
26.优选地,所述水平抓取组合吸盘机构包括与所述第二辅助机构的输出端固定连接的支架座,且所述支架座上固定有水平设置的底部托盘,所述底部托盘上方设置有立式吸盘组和驱动所述立式吸盘组沿所述立式吸盘组朝向方向伸缩运动的水平推拉气缸组;所述立式吸盘组的上方设置有可翻转水平吸盘组,且所述可翻转水平吸盘组与所述立式吸盘组之间通过旋转气缸组件连接,所述旋转气缸组件用于驱动所述可翻转水平吸盘组翻转;
27.所述垂直抓取吸盘机构安装在所述底部托盘的底部。
28.优选地,所述可接续电动伸缩托辊组包括至少一个伸缩托辊机构,所述伸缩托辊机构包括可升降支腿、设置在所述可升降支腿上的伸缩托辊主体,以及驱动所述伸缩托辊
主体上的托辊工作的第一驱动电机系统;所述伸缩托辊主体上设置有第一防跑偏挡板,采用的两个或两个以上所述伸缩托辊机构时,相邻两个所述伸缩托辊机构采用第一连接插销连接为一体。
29.优选地,所述自动化消毒装置包括机架,所述机架内设置有防锈蚀托辊传动机构,所述防锈蚀托辊传动机构的头端与所述可接续电动伸缩托辊组的尾端连接,所述防锈蚀托辊传动机构的尾端与所述出货托辊组的头端连接;
30.所述机架内,在靠近所述机架的头部处设置有六组喷液系统,且六组所述喷液系统分别设置在所述机架内的上、下、左、右、前、后,用于对所述防锈蚀托辊传动机构上的货物进行六面喷淋,所述喷液系统包括至少一个喷淋单元,所述喷淋单元用于向货物喷淋消毒液;
31.所述机架内,在靠近所述机架的尾部处设置有四组紫外光催化耦合消杀组件,且四组所述紫外光催化耦合消杀组件分别设置在所述机架内的上、下、左、右;所述紫外光催化耦合消杀组件包括紫外灯组、光催化基板和光催化剂涂层,所述紫外灯组发出紫外光线,实现紫外消杀作用;所述光催化剂涂层在紫外光照条件下产生活性氧物种,实现降解消杀作用。
32.优选地,所述出货托辊组的尾部具有挡板,且所述出货托辊组的底部具有滴液接水槽,所述出货托辊组的顶部侧壁具有第二跑偏防护挡板和位置传感器。
33.优选地,所述机器人自动化码垛系统包括机器人本体,所述机器人具有用于码垛货物的末端执行器。
34.本发明还公开了一种集装箱内货物自动抓取卸货消毒和码垛方法,包括:
35.s1、准备工作
36.人工操作打开待卸货集装箱门,所述自主行进式集装箱内纸盒装货物自动抓取卸货装置运行至集装箱门前,完成自动化抓取卸货作业前准备工作;
37.s2、货物卸货过程
38.s21、所述视觉识别系统开始对货箱进行识别、定位,生成运动控制指令;所述运动系统根据运动控制指令带动所述抓取系统到达指定位置;
39.s22、所述抓取系统将货物抓取,并放在所述电动伸缩托辊机构上进行传递;
40.s23、重复s21-s22步骤进行循环卸货;
41.s3、货物传送过程
42.s31、所述电动伸缩托辊机构上的货物进入所述可接续电动伸缩托辊组;
43.s32、所述可接续电动伸缩托辊组将货物传送至所述自动化消毒装置;
44.s4、货物消毒过程
45.s41、所述自动化消毒装置对货物进行消毒;
46.s5、货物码垛过程
47.s51、消毒后的货物进入所述出货托辊组;
48.s52、所述机器人自动化码垛系统对所述出货托辊组上的货物进行码垛,直至卸货完成。
49.较现有技术相比,本发明具有以下优点:
50.1、本发明针对冷链物流企业的纸盒装货物的卸货、消毒、码垛提供了高效率且智
能化的集成式解决方案。
51.2、本发明提供的自主行进式集装箱盒装货物自动抓取卸货装置,整体装置结构紧凑,体积小,可移动,满足绝大部分冷链企业的月台尺寸限制和集装箱内小空间尺寸下纸箱货物的快速高效与自动化卸货需求。
52.3、本发明提供的自主行进式集装箱盒装货物自动抓取卸货装置,采用电动伸缩托辊设计,即满足卸货时的伸出需求,又满足视觉识别时的缩回需求,实现视觉识别系统的大行程回撤。
53.4、本发明提供的自主行进式集装箱盒装货物自动抓取卸货装置,其垂直升降采用紧凑型三轴平行叠加联动机构设计,在保证宽度和高度紧凑的同时极大的增加了对待卸纸箱货物在大行程高度范围内的适应性,可实现标准集装箱的全断面卸跺作业需求。
54.5、本发明提供的自主行进式集装箱盒装货物自动抓取卸货装置,采用可控翻转水平吸盘组增加了对扁平纸箱上表面的抓取,增加了抓取的可靠性,是对扁平纸箱侧吸时吸力不足的有力补充。
55.6、本发明提供的消杀装置,通过化学喷淋消杀、紫外消杀以及光催化消杀耦合协同作用,实现对病毒、微生物等的消杀灭活;紫外光催化耦合消杀组件的紫外线和光催化增强了化学消毒药液在低温下(-1℃~-80℃)消毒能力,同时紫外光和光催化自身均有消毒能力,它们与化学喷淋消杀、紫外消杀和光催化消杀作用叠加,有效减少了化学消毒药液的使用量,实现高效、无死角、绿色低成本消毒。
56.基于上述理由本发明可在智能化卸货消毒码垛等领域广泛推广。
附图说明
57.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
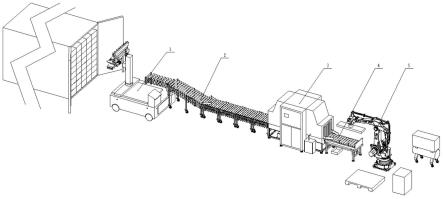
58.图1为本发明一种集装箱内货物自动抓取卸货消毒和码垛作业线结构示意图。
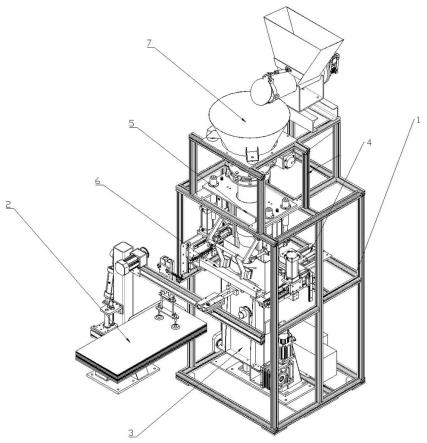
59.图2为本发明自主行进式集装箱内纸盒装货物自动抓取卸货装置三维示意图。
60.图3为本发明自主行进式集装箱内纸盒装货物自动抓取卸货装置另一视角下三维示意图。
61.图4为本发明自主行进式集装箱内纸盒装货物自动抓取卸货装置侧视图。
62.图5为本发明自主行进式集装箱内纸盒装货物自动抓取卸货装置主视图。
63.图6为本发明z向垂直辅助升降机构及抓取系统示意图。
64.图7为本发明电动行走平台车结构示意图。
65.图8为本发明可接续电动伸缩托辊组结构示意图。
66.图9为本发明伸缩托辊机构结构示意图。
67.图10为本发明自动化消毒装置结构示意图。
68.图11为本发明自动化消毒装置内部示意图。
69.图12为本发明紫外光催化耦合消杀组件结构示意图。
70.图13为本发明出货托辊组结构示意图。
71.图14为本发明机器人自动化码垛系统结构示意图。
72.图中:
73.1、自主行进式集装箱内纸盒装货物自动抓取卸货装置;101、电动行走平台车;1011、作业平台;1012、电驱动车轮组;1013、内嵌抽屉式电控柜系统;1014、测距传感器组;1015、操控台;102、x向水平纵向移动机构; 103、y向水平横向移动机构;104、回转机构;105、z向垂直升降机构;106、 z向垂直辅助升降机构;1061、第一辅助升降机构;1062、第二辅助升降机构;107、电动伸缩托辊机构;108、垂直抓取吸盘机构;109、水平抓取组合吸盘机构;1091、支架座;1092、立式吸盘组;1093、水平推拉气缸组;1094、旋转气缸组件;1095、可翻转水平吸盘组;1096、底部托盘;1010、视觉识别系统;
74.2、可接续电动伸缩托辊组;201、伸缩托辊主体;202、第一驱动电机系统;203、第一连接插销;204、第一防跑偏挡板;205、可升降支腿;
75.3、自动化消毒装置;301、机架;302、防锈蚀托辊传动机构;303、喷液系统;304、紫外光催化耦合消杀组件;3041、紫外灯组;3042、光催化基板;3043、光催化剂涂层;305、废液过滤回收装置;306、防护帘;307、外接储液箱;
76.4、出货托辊组;401、托辊机构;402、第二驱动电机系统;403、第二跑偏防护挡板;404、位置传感器;405、滴液接水槽;
77.5、机器人自动化码垛系统;501、机器人本体;502、底座;503、气动抓取末端执行器;504、电气控制系统;505、空压机。
具体实施方式
78.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
79.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
80.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
81.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当清楚,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员己知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中
不需要对其进行进一步讨论。
82.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制:方位词“内、外”是指相对于各部件本身的轮廓的内外。
83.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其位器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
84.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
85.实施例1
86.如图1所示,一种集装箱内货物自动抓取卸货消毒和码垛作业线,包括:
87.自主行进式集装箱内纸盒装货物自动抓取卸货装置1,用于抓取货物,并将货物放置在可接续电动伸缩托辊组2;
88.所述可接续电动伸缩托辊组2,其头端与所述自主行进式集装箱内纸盒装货物自动抓取卸货装置1连接,用于传递货物;
89.自动化消毒装置3,其头端与所述可接续电动伸缩托辊组2的尾端连接,用于对所述可接续电动伸缩托辊组2传递来的货物进行自动化消毒,并将货物传递至出货托辊组4;
90.所述出货托辊组4,其头端与所述自动化消毒装置3的尾端连接,用于传递货物;
91.机器人自动化码垛系统5,其与所述出货托辊组4的尾端连接,用于抓取所述出货托辊组4上的货物,并将其码垛。
92.如图2~5所示,所述自主行进式集装箱内纸盒装货物自动抓取卸货装置 1包括运动系统、抓取系统和视觉识别系统1010和电动伸缩托辊机构107;所述视觉检测系统1010对货物进行扫描识别,判断货物的位置并给出运动控制指令,驱动所述运动系统使所述抓取系统到达指定位置,所述抓取系统将货物抓取并放在所述电动伸缩托辊机构107上,所述电动伸缩托辊机构107 的尾部与所述可接续电动伸缩托辊组2的头端连接。
93.所述运动系统包括在水平方向上沿x向纵向移动的电动行走平台车101、 x向水平纵向移动机构102、y向水平横向移动机构103、回转机构104、z 向垂直升降机构105和z向垂直辅助升降机构106;所述抓取系统包括垂直抓取吸盘机构108和水平抓取组合吸盘机构109;
94.所述x向水平纵向移动机构102的安装端安装在所述电动行走平台车 101上,其输出端沿x向水平纵向运动;x向水平纵向移动机构102可采用滑轨、滑台、电机和丝杠的方式,
或采用滑台、滑轨和气缸的方式,方式可以采用多样。
95.所述y向水平横向移动机构103的安装端安装在所述x向水平纵向移动机构的输出端上,所述y向水平横向移动机构103的输出端沿y向水平横向移动;y向水平横向移动机构103可采用滑轨、滑台、电机和丝杠的方式,或采用滑台、滑轨和气缸的方式,方式可以采用多样。
96.所述回转机构104的安装端安装在所述y向水平横向移动机构102的输出端上,且其输出端围绕其z向中心轴线转动;回转机构103可以采用电机驱动齿轮,带动中心齿轮转动,且中心齿轮固定在旋转台上的方式,也可以采用电机直接驱动旋转台的方式等等,任何能够达到回转的机构均可。
97.所述z向垂直升降机构105的安装端安装在所述回转机构104的输出端上,其输出端沿z向方向竖直运动;
98.如图6所示,z向垂直辅助升降机构106的安装端安装在所述z向垂直升降机构105的输出端上,其输出端沿z向方向竖直运动;所述z向垂直辅助升降机构106包括第一辅助升降机构1061和第二辅助升降机构1062,所述第一辅助升降机构1061、所述第二辅助升降机构1062和所述z向垂直升降机构105构成紧凑型三轴平行叠加联动垂直位移装置;
99.所述第一辅助升降机构1061的安装端安装在所述z向垂直升降机构105 的输出端,其输出端沿z向方向竖直运动;
100.所述第二辅助升降机构1062的安装端安装在所述第一辅助升降机构105 的输出端,其输出端沿z向方向竖直运动;
101.z向垂直升降机构105、第一辅助升降机构1061和第二辅助升降机构1062可采用滑轨、滑台、电机和丝杠的方式,或采用滑台、滑轨和气缸的方式,方式可以采用多样。
102.如图6所示,所述水平抓取组合吸盘机构109包括与所述第二辅助机构 1062的输出端固定连接的支架座1091,且所述支架座1091上固定有水平设置的底部托盘1096,所述底部托盘1096上方设置有立式吸盘组1092和驱动所述立式吸盘组1092沿所述立式吸盘组1092朝向方向伸缩运动的水平推拉气缸组1093;所述立式吸盘组1092的上方设置有可翻转水平吸盘组1095,且所述可翻转水平吸盘组1095与所述立式吸盘组1092之间通过旋转气缸组件1094连接,所述旋转气缸组件1094用于驱动所述可翻转水平吸盘组1095 翻转;
103.所述垂直抓取吸盘机构108安装在所述底部托盘1096的底部,所述垂直抓取吸盘机构108实现对中下部货物的抓取。
104.通过立式吸盘组1092对纸盒箱侧面吸附,可控翻转水平吸盘组1095翻下实现对纸盒箱上表面吸附,用于对立式吸盘组1092侧吸时吸力不足的有力补充。在水平推拉气缸组1093缩回拉力作用下,将纸盒箱拉出至底部托盘1096上。
105.如图7所示,所述电动行走平台车101包括作业平台1011、电驱动车轮组1012,内嵌抽屉式电控柜系统1013、测距传感器组1014、操控台1015;内嵌抽屉式电控柜系统1013包括整个装置的控制系统;其中:
106.作业平台1011实现x向水平纵向移动机构102、电动伸缩托辊机构107 和操控台1015的安装;电驱动车轮组1012实现电动行走平台车101的自行式运动;内嵌抽屉式电控柜系统1013包括控制系统,实现整个装置的控制系统安装和处理;测距传感器组1014共设置8个传感器,分布在电动行走平台车101四周,每个侧面上分布2个;操控台1015实现控制系统
的可视化和外部操作,电动行走平台车101在视觉系统和两侧的测距传感器引导下,根据卸货位置需要,数控驱动,实现卸货过程的自主行进。
107.所述电动伸缩托辊机构107的固定端安装在所述电动行走平台车101的尾端,与所述可接续电动伸缩托辊组2的头端相对,且其伸缩端在水平方向上沿x向伸缩。所述电动伸缩托辊机构2的前支腿采用弧形过渡和单点支撑的方式,以满足伸缩过程中对y向水平横向移动机构103的底板的躲避需要;电动伸缩托辊机构2有两种工作状态,伸出时用于抓取货物后的转运,收缩时用于增加视觉识别时的视场距离,两种工作状态的切换由程序控制交替进行。
108.如图8所示,可接续电动伸缩托辊组2整体上采用电动伸缩的托辊,所述可接续电动伸缩托辊组2包括至少一个伸缩托辊机构,如图9所示,所述伸缩托辊机构包括可升降支腿205、设置在所述可升降支腿205上的伸缩托辊主体201,以及驱动所述伸缩托辊主体201上的托辊工作的第一驱动电机系统202;所述伸缩托辊主体201上设置有第一防跑偏挡板204,采用的两个或两个以上所述伸缩托辊机构时,相邻两个所述伸缩托辊机构采用第一连接插销203连接为一体,位于头部的伸缩托辊机构采用第一连接插销与电动伸缩托辊机构107的固定端连接为一体。可升降支腿205的升降方式可以采用配置多个销孔和定位销的方式实现高度选择。
109.电动伸缩托辊机构107和伸缩托辊主体201具有伸缩架和驱动伸缩架伸缩的驱动机构,伸缩架上具有托辊和驱动托辊工作的电机。
110.如图10~12所示,所述自动化消毒装置3包括机架301,所述机架301 内设置有防锈蚀托辊传动机构302,所述防锈蚀托辊传动机构302的头端与所述可接续电动伸缩托辊组2的尾端通过第一连接插销203连接为一体,所述防锈蚀托辊传动机构302的尾端与所述出货托辊组4的头端连接;
111.所述机架301内,在靠近所述机架301的头部处设置有六组喷液系统303,且六组所述喷液系统303分别设置在所述机架内的上、下、左、右、前、后,用于对所述防锈蚀托辊传动机构302上的货物进行六面喷淋,所述喷液系统 303包括至少一个喷淋单元,所述喷淋单元用于向货物喷淋消毒液;
112.所述机架301内,在靠近所述机架301的尾部处设置有四组紫外光催化耦合消杀组件304,且四组所述紫外光催化耦合消杀组件304分别设置在所述机架301内的上、下、左、右;所述紫外光催化耦合消杀组件304包括紫外灯组3041、光催化基板3042和光催化剂涂层3043,所述紫外灯组3041发出紫外光线,实现紫外消杀作用;所述光催化剂涂层3043在紫外光照条件下产生活性氧物种(包括
·
o2–
、h2o2、
·
oh和1o2等)),实现降解消杀作用。所述机架301在所述防锈蚀托辊传动机构302的底部设置有废液过滤回收装置305,两端具有防护帘306,侧壁具有外接储液箱307;
113.如图13所示,所述出货托辊组4包括托辊机构401、第二驱动电机系统 402、第二跑偏防护挡板403、位置传感器404、滴液接水槽405;托辊机构 401的尾部具有挡板,滴液接水槽405位于托辊机构401底部,第二跑偏防护挡板403和位置传感器404位于托辊机构401的侧壁,第二驱动电机系统用于驱动托辊机构401工作。托辊机构401通过第二连接插销与防锈蚀托辊传动机构连接为一体。
114.如图14所示,所述机器人自动化码垛系统5包括机器人本体501、机器人本体座501
于底座502上、机器人本体501具有气动抓取末端执行器503、电气控制系统504和空压机505。
115.实施例2
116.如图1~14所示,一种集装箱内货物自动抓取卸货消毒和码垛方法,采用了实施例1中提供的作业线,包括:
117.s1、准备工作
118.人工操作打开待卸货集装箱门,将自主行进式集装箱内纸盒装货物自动抓取卸货装置1运行至集装箱门前,完成自动化抓取卸货作业前准备工作;
119.s2、货物卸货过程
120.s21、视觉识别
121.s211、由视觉识别系统1010开始对货箱进行识别、定位,生成运动控制指令;
122.s212、判断采用水平抓取组合吸盘机构109还是垂直抓取吸盘机构108 进行抓取;
123.s213、确定货箱坐标点后形成相应的运动策略;所述运动系统根据运动控制指令带动所述抓取系统到达指定位置;
124.s22、所述抓取系统将货物抓取,并放在所述电动伸缩托辊机构2上进行传递;
125.s221、上部纸盒装货物的自动化抓取卸货;
126.s2221、使水平抓取组合吸盘机构109运行至上部待抓取位置;
127.s2222、水平推拉气缸组1093运行使水平抓取组合吸盘机构109水平推出;对于扁平纸箱,当立式吸盘组1092吸到纸箱侧面后,可控翻转水平吸盘组1095在旋转气缸组件1094的作用下翻转,实现对纸箱上表面的辅助吸盘;
128.s2223、抓取货物后由水平推拉气缸组1093使水平抓取组合吸盘机构 109水平拉回,此时货物落到底部托盘1096上。
129.s2224、运动系统带动水平抓取组合吸盘机构109下降并旋转90
°
至卸货位置;同步地,电动伸缩托辊机构107伸出;
130.s2225、水平推拉气缸组1093将水平抓取组合吸盘机构109推出,进行卸货;对于扁平纸箱,可控翻转水平吸盘组1095在旋转气缸组件1094的作用下翻转,脱开对纸箱上表面的吸取;货物落在电动伸缩托辊机构107上。
131.s222、中下部纸箱货物自动化抓取卸货;
132.s2221、垂直抓取吸盘机构108运行至中下部待抓取位置;同步地,电动行走平台车101前进一个集装箱的距离;
133.s2222、垂直抓取吸盘机构108进行货物抓取;
134.s2223、运动系统使垂直抓取吸盘机构108先提升至一定高度,后退一定安全距离后旋转90
°
至卸货位置;同步地,电动伸缩托辊机构107伸出;
135.s2224、垂直抓取吸盘机构进行卸货,货物落在电动伸缩托辊机构107 上;
136.s23、循环卸货,s21-s22步骤循环进行;
137.s3、货物传送过程
138.s31、卸货后的纸盒装货物进入可接续电动伸缩托辊组2;第一跑偏防护挡板204对传送过程中不整齐的货物进行规整;
139.s32、传送货物至自动化消毒装置3;
140.s4、货物消毒过程
141.s41、自动化消毒装置3对货物进行快速高效、六面无死角的紫外光催化和消毒液耦合多能场消杀;
142.s5、货物码垛过程
143.s51、消毒后的货物进入出货托辊组4;第二跑偏防护挡板403对消毒后不整齐的货物进行规整;进入待码垛位置,位置传感器404检测到纸箱进入预定位置;
144.s52、机器人本体501运行使气动抓取末端执行器503抓取纸箱,放入垛盘,循环码垛直至卸货完成。
145.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。