1.本发明涉及无人机设备技术领域,特别涉及一种上挂装置。
背景技术:
2.输电线路的塔架需定期进行维护作业,在作业时,需作业人员登塔进行高空作业,而作业人员在登塔时需佩戴防坠装置。
3.目前,防坠装置主要通过人工上挂的方式,通常由经验较为丰富的作业人员预先将防坠装置悬挂至塔架上,然后后续的作业人员再借助该防坠装置登塔作业,所以目前的上挂方式并不能保证每一位作业人员的人身安全,此外,现有也有部分防坠装置借助无人机进行悬挂,但是,现有无人机在悬挂防坠装置时容易受到风阻问题,经常在上挂时出现剧烈的晃动导致上挂难度增大。
4.可见,现有技术还有待改进和提高。
技术实现要素:
5.鉴于上述现有技术的不足之处,本发明的目的在于提供一种上挂装置,其可免除作业人员登塔安装防坠装置,并且可有效消除无人机运输防坠装置时的风阻问题,降低了防坠装置的上挂难度。
6.为了达到上述目的,本发明采取了以下技术方案:
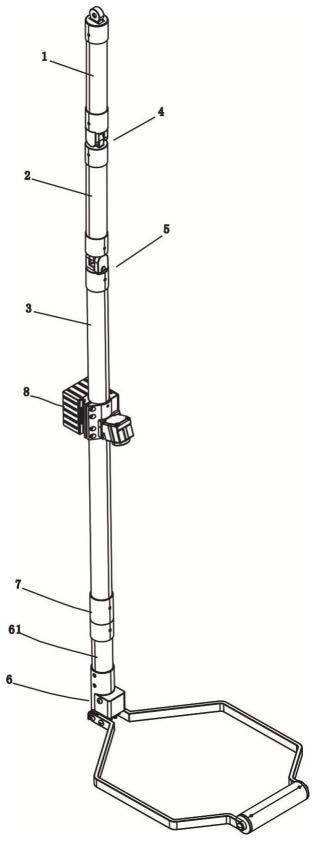
7.一种上挂装置,包括第一杆体、第二杆体和第三杆体,所述第一杆体与所述第二杆体之间通过第一关节部转动连接,所述第二杆体与所述第三杆体之间通过第二关节部转动连接,所述第二杆体的摆动方向与所述第三杆体的摆动方向垂直;所述第三杆体的端部设置有可上下摆动的吊挂部。
8.所述的上挂装置中,所述第一杆体与第二杆体的长度之和小于所述第三杆体的长度。
9.所述的上挂装置中,所述第一关节部包括第一铰接座和第一转动座,所述第一铰接座与所述第一转动座铰接;所述第二关节部包括第二铰接座和第二转动座,所述第二铰接座与所述第二转动座铰接;所述第一铰接座与所述第一杆体的一端连接,所述第一转动座与所述第二杆体的一端连接,所述第二转动座与所述第二杆体的另一端连接,所述第二铰接座与所述第三杆体的一端连接。
10.所述的上挂装置中,所述第一铰接座与所述第一转动座之间和所述第二铰接座与所述第二转动座之间均通过阻尼转轴铰接。
11.所述的上挂装置中,所述第一铰接座与所述第二铰接座的结构一致,所述第一转动座与所述第二转动座的结构一致;所述第一铰接座包括第一套筒,所述第一套筒的一端设置有第一安装槽,所述第一套筒的另一端设置有铰接槽,所述阻尼转轴设置在所述铰接槽的一侧槽壁,所述铰接槽的另一侧槽壁设置有与所述阻尼转轴同轴心的铰接孔;所述第一转动座包括第二套筒,所述第二套筒的一端设置有第二安装槽,所述第二套筒的另一端
设置有与所述铰接槽配合连接的转动块,所述转动块的一侧设置有与所述阻尼转轴配合连接的卡槽,所述转动块的另一侧设置有与所述铰接孔配合连接的铰接柱;所述第一安装槽用于连接所述第一杆体或第三杆体;所述第二安装槽用于连接所述第二杆体。
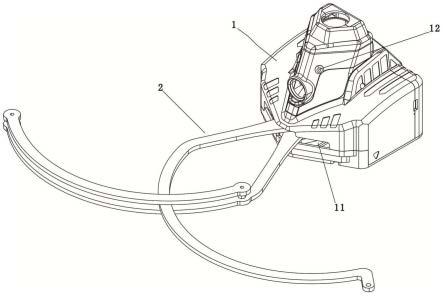
12.所述的上挂装置中,所述吊挂部包括连杆、连接头和摆臂,所述连杆设置在所述连接头的顶部,且所述连杆通过连接部与所述第三杆体的端部连接,所述摆臂与所述连接头的底部转动连接。
13.所述的上挂装置中,所述连接头包括第三套筒,所述第三套筒的顶部设置有与所述连杆配合连接的第三安装槽,所述第三套筒的底部两侧分别设置有耳部,所述第三套筒的前侧拉伸部;所述摆臂的一端分别设置有第一铰钉和第二铰钉,所述第一铰钉的两端分别与两个所述耳部铰接,所述第二铰钉与所述拉伸部之间通过多个拉伸弹簧连接。
14.所述的上挂装置中,所述摆臂的两侧分别设置有抬架,所述抬架的一端通过所述第一铰钉和所述第二铰钉连接,所述抬架的另一端通过托杆连接。
15.所述的上挂装置中,所述第三杆体上设置有摄像机构;所述摄像机构用于拍摄所述吊挂部的工作状态。
16.所述的上挂装置中,所述第一杆体的顶部设置有舵机接头;所述舵机接头用于与无人机连接。
17.有益效果:
18.本发明提供了一种上挂装置,在无人机飞行过程中,当防坠装置受风力影响发生晃动时,所述第二杆体和所述第三杆体则根据风力方向自适应摆动,以此满足多向风阻的缓冲需求,当防坠装置遇到风阻时,通过所述第三杆体和所述第二杆体的摆动动作抵消防坠装置的惯性力,从而减少惯性力对无人机的影响,以此提高无人机飞行的稳定性。
附图说明
19.图1为本发明提供的上挂装置的整体结构示意图;
20.图2为本发明提供的上挂装置的拆解结构示意图;
21.图3为本发明提供的上挂装置中所述第一关节部的拆解结构示意图;
22.图4为本发明提供的上挂装置中所述吊挂部的拆解结构示意图;
23.图5为本发明提供的上挂装置中所述连接部的拆解结构示意图。
24.主要元件符号说明:1-第一杆体、2-第二杆体、3-第三杆体、4-第一关节部、5-第二关节部、6-吊挂部、7-连接部、8-摄像机构、9-舵机接头、41-第一铰接座、42-第一转动座、43-阻尼转轴、51-第二铰接座、52-第二转动座、61-连杆、62-连接头、63-摆臂、64-第一铰钉、65-第二铰钉、66-拉伸弹簧、71-上筒体、72-下筒体、73-卡壁、81-摄像头、82-图传模块、83-夹座、84-夹槽、411-第一套筒、412-铰接槽、413-铰接孔、421-第二套筒、422-转动块、423-卡槽、424-铰接柱、621-第三套筒、622-耳部、623-拉伸部、624-第三铰钉、631-抬架、632-托杆。
具体实施方式
25.本发明提供一种上挂装置,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例
仅用以解释本发明,并不用于限定本发明。
26.在本发明的描述中,需要理解的是,术语“中部”、“内侧”、“外侧”等指示的方位或位置关系为本发明基于附图的方位或位置关系,仅是为了便于描述本发明和简化描述。另外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。
27.请参阅图1至图5,本发明提供一种上挂装置,包括第一杆体1、第二杆体2和第三杆体3,所述第一杆体1与所述第二杆体2之间通过第一关节部4转动连接,所述第二杆体2与所述第三杆体3之间通过第二关节部5转动连接,所述第二杆体2的摆动方向与所述第三杆体3的摆动方向垂直;所述第三杆体3的端部设置有可上下摆动的吊挂部6。
28.在实际使用时,所述第一杆体1的顶部与无人机的底部连接,从而使本装置悬挂在无人机的下方,并且,通过所述吊挂部6悬挂防坠装置,使无人机可携带防坠装置运送至指定的安装位置;在无人机飞行过程中,当防坠装置受风力影响发生晃动时,所述第二杆体2和所述第三杆体3则根据风力方向自适应摆动,通过所述第一关节部4和所述第二关节部5实现所述第二杆体2和所述第三杆体3不同方向的摆动动作,以此满足多向风阻的缓冲需求,当防坠装置遇到风阻时,通过所述第三杆体3和所述第二杆体2的摆动动作抵消防坠装置的惯性力,从而减少惯性力对无人机的影响,以此提高无人机飞行的稳定性;此外,当无人机和防坠装置存在上下抖动的情况下,可通过可摆动的吊挂部6在一定程度上消除防坠装置在摆动时所带来的惯性力,从而减少防坠装置在飞行时的摆幅。
29.如图1至图5所示,进一步地,所述第一杆体1与第二杆体2的长度之和小于所述第三杆体3的长度;通过缩短所述第一杆体1和所述第二杆体2的长度使本装置的整体重心向所述无人机的底部靠拢,减少所述第一杆体1和所述第二杆体2的惯性力对无人机的影响,并且重心靠近无人机的底部可使无人机在飞行时所受到阻力形成的力矩促使俯仰角减小,从而提高飞行时的稳定性。
30.在一个实施方式中,所述第一杆体1和所述第二杆体2的长度之和等于所述第三杆体3长度的二分之一;通过上述设置,使所述第一关节部4与所述第二关节部5靠近无人机的底部,即使本装置的重心向无人机的底部靠近,以此提高无人机在飞行时的稳定性。
31.在另一实施方式中,所述第一杆体1和所述第二杆体2的长度之和等于所述第三杆体3长度的三分之二;需要说明的是,所述第一杆体1和所述第二杆体2的长度之和与所述第三杆体3长度之间的比例不限于二分之一或三分之二,在此不再赘述。
32.如图1至图5所示,进一步地,所述第一关节部4包括第一铰接座41和第一转动座42,所述第一铰接座41与所述第一转动座42铰接;所述第二关节部5包括第二铰接座51和第二转动座52,所述第二铰接座51与所述第二转动座52铰接;所述第一铰接座41与所述第一杆体1的一端连接,所述第一转动座42与所述第二杆体2的一端连接,所述第二转动座52与所述第二杆体2的另一端连接,所述第二铰接座51与所述第三杆体3的一端连接;在使用时,通过所述第一铰接座41和所述第一转动座42实现所述第一杆体1和所述第二杆体2之间的相对转动动作;同样地,通过所述第二铰接座51和所述第二转动座52实现所述第二杆体2和所述第三杆体3之间的相对转动动作;并且,所述第二杆体2与所述第三杆体3的摆动方向垂直,从而满足多向风阻的缓冲需求。
33.如图1至图5所示,进一步地,所述第一铰接座41与所述第一转动座42之间和所述
第二铰接座51与所述第二转动座52之间均通过阻尼转轴43铰接;通过所述阻尼转轴43产生的阻尼有效的消除所述第二杆体2或第三杆体3的惯性力,即减小所述第二杆体2和所述第三杆体3的摆幅,从而减少本装置在摆动时对无人机的影响,提高无人机在飞行时的稳定性;此外,当本装置遇到突袭大风时,所述阻尼转轴43还有助于缓解所述第二杆体2和所述第三杆体3所受到的瞬时冲击,使两者可快速恢复到稳定状态。
34.需要说明的是,所述阻尼转轴43为现有阻尼转轴43结构,其工作原理及具体结构也为现有技术,在此不再赘述。
35.如图1至图5所示,进一步地,所述第一铰接座41与所述第二铰接座51的结构一致,所述第一转动座42与所述第二转动座52的结构一致;所述第一铰接座41包括第一套筒411,所述第一套筒411的一端设置有第一安装槽(未在图中示出),所述第一套筒411的另一端设置有铰接槽412,所述阻尼转轴43设置在所述铰接槽412的一侧槽壁,所述铰接槽412的另一侧槽壁设置有与所述阻尼转轴43同轴心的铰接孔413;所述第一转动座42包括第二套筒421,所述第二套筒421的一端设置有第二安装槽(未在图中示出),所述第二套筒421的另一端设置有与所述铰接槽412配合连接的转动块422,所述转动块422的一侧设置有与所述阻尼转轴43配合连接的卡槽423,所述转动块422的另一侧设置有与所述铰接孔413配合连接的铰接柱424;所述第一安装槽用于连接所述第一杆体1或第三杆体3;所述第二安装槽用于连接所述第二杆体2;在使用时,当所述第一铰接座41和所述第一转动座42之间或所述第二铰接座51和所述第二转动座52之间发生转动时,所述第一套筒411和所述第二套筒421之间则通过所述转动块422绕所述阻尼转轴43转动,从而实现所述第一套筒411与所述第二套筒421之间的相对转动动作;此外,通过所述第一安装槽和所述第二安装槽可便于所述第一套筒411和所述第二套筒421与所述第一杆体1、所述第二杆体2和所述第三杆体3之间的插装连接,使整个安装过程更加简便快捷,提高本装置的装配效率。
36.在一个实施方式中,所述第一套筒411的两侧分别设置有与所述第一安装槽连通的轴孔(未在图中示出),所述第二套筒421的两侧也分别设置有与所述第二安装槽连通的轴孔,所述第一杆体1、所述第二杆体2和所述第三杆体3上对应所述轴孔均设置有插销孔(未在图中示出),所述轴孔与所述插销孔之间通过插销(未在图中示出)连接;通过上述设置使本装置可实现快拆快装的功能,从而可便于本装置的运输、组装等过程。
37.在另一实施方式中,所述轴孔与所述插销孔之间也可通过螺钉螺纹连接。
38.如图1至图5所示,进一步地,所述吊挂部6包括连杆61、连接头62和摆臂63,所述连杆61设置在所述连接头62的顶部,且所述连杆61通过连接部7与所述第三杆体3的端部连接,所述摆臂63与所述连接头62的底部转动连接;在使用时,通过可转动的所述摆臂63消除防坠装置的部分惯性力,减少防坠装置对无人机的影响,即减少无人机的晃动感。
39.在本实施方式中,所述连接部7包括上筒体71和下筒体72,所述下筒体72的顶部设置有与所述上筒体71的筒腔配合连接的卡壁73,所述卡壁73与所述上筒体71的筒腔螺纹连接;在使用时,所述上筒体71套装在所述第三杆体3的端部,所述下筒体72套装在所述连杆61的顶部,并且所述下筒体72与所述上筒体71的底部螺纹连接,从而实现所述连杆61与所述第三杆体3的快速连接;通过螺接的连接方式使本装置可实现快拆快装的功能,从而可便于本装置的运输、组装等过程。
40.在本实施方式中,所述第一杆体1、所述第二杆体2、所述第三杆体3和所述连杆61
均为中空杆体;通过将各个杆体设置有中空来减少本装置的整体重量,从而减轻无人机的载重负荷。
41.如图1至图5所示,进一步地,所述连接头62包括第三套筒621,所述第三套筒621的顶部设置有与所述连杆61配合连接的第三安装槽(未在图中示出),所述第三套筒621的底部两侧分别设置有耳部622,所述第三套筒621的前侧拉伸部623;所述摆臂63的一端分别设置有第一铰钉64和第二铰钉65,所述第一铰钉64的两端分别与两个所述耳部622铰接,所述第二铰钉65与所述拉伸部623之间通过多个拉伸弹簧66连接;在使用时,通过所述拉伸弹簧66实现所述摆臂63的往复摆动动作,当钩挂在所述摆臂63上的防坠装置受到风力影响时,所述摆臂63则通过所述拉伸弹簧66对防坠装置进行拉拽,尽量消除防坠装置的晃动感,从而提高无人机的稳定性。
42.在本实施方式中,所述拉伸部623中水平设置有第三铰钉624,所述拉伸弹簧66的两端分别设置有挂钩(未在图中示出),所述拉伸弹簧66的两端通过所述挂钩分别与所述第二铰钉65和所述第三铰钉624连接;在安装时,工作人员拉伸弹簧66的两端通过挂钩钩挂在第二铰钉65和第三铰钉624上即可,整个安装过程简单便捷。
43.如图1至图5所示,进一步地,所述摆臂63的两侧分别设置有抬架631,所述抬架631的一端通过所述第一铰钉64和所述第二铰钉65连接,所述抬架631的另一端通过托杆632连接;两个所述抬架631之间呈镂空状;通过两个所述抬架631使整个摆臂63形成镂空结构,从而减少整个所述摆臂63的迎风面积,即便遇到较大的风力的风也不会使所述摆臂63发生较大的摆动,此外,通过所述托杆632增大与防坠装置之间的接触面积,提高对防坠装置钩挂的牢固度。
44.在一个实施方式中,所述托杆632的两端设置有胶塞(未在图中示出),所述胶塞通过固定钉与所述抬架631连接;通过所述胶塞增大所述托杆632两端的阻尼,防止所述托杆632在钩挂防坠装置时出现滚动的问题。
45.如图1至图5所示,进一步地,所述第三杆体3上设置有摄像机构8;所述摄像机构8用于拍摄所述吊挂部6的工作状态;需要说明的是,所述摄像机构8与外部控制端通信连接,采用蓝牙、wifi等无线通讯方式进行数据传输;在使用时,通过所述摄像机构8拍摄防坠装置的到位情况,将所述吊挂部6与防坠装置的位置图像实时传送至工作人员的控制端,工作人员通过该画面辅助操作无人机的飞行动作。
46.在本实施方式中,所述摄像机构8包括摄像头81、图传模块82和夹座83,所述摄像头81和所述图传模块82分别设置在所述夹座83的两侧,所述夹座83上设置有朝一侧开口的夹槽84,所述夹槽84的槽型与所述第三杆体3相匹配;所述夹座83通过所述夹槽84夹持所述第三杆体3,并且所述夹槽84的开口端通过螺钉连接,从而完成所述摄像机构8的安装动作;需要说明的是,所述摄像头81和所述图传模块82均为现有摄像头81结构及图传模块82结构,其工作原理及连接方式均为现有技术,在此不再赘述。
47.在本实施方式中,所述摆臂63与所述连接头62之间呈90
°
折叠状态,在取挂钩的时候,摄像头81正对取钩区域,通过处于折叠状态的摆臂63便于观察挂钩位置,使所述摆臂63可更容易取挂钩;此外,图传模块82采用5.8g频率传输,用于实时观察吊挂部,辅助挂钩、取钩动作。
48.如图1至图5所示,进一步地,所述第一杆体1的顶部设置有舵机接头9;所述舵机接
头9用于与无人机连接;需要说明的是,无人机的底部设置有舵机,且舵机的输出端设置有与舵机接头9配合连接的钩挂部,在使用时,无人机通过舵机控制挂钩部与所述舵机接头9连接,从而完成与本装置的连接。
49.综上所述,在无人机飞行过程中,当防坠装置受风力影响发生晃动时,所述第二杆体2和所述第三杆体3则根据风力方向自适应摆动,通过所述第一关节部4和所述第二关节部5实现所述第二杆体2和所述第三杆体3不同方向的摆动动作,以此满足多向风阻的缓冲需求,当防坠装置遇到风阻时,通过所述第三杆体3和所述第二杆体2的摆动动作抵消防坠装置的惯性力,从而减少惯性力对无人机的影响,以此提高无人机飞行的稳定性;此外,当无人机和防坠装置存在上下抖动的情况下,可通过可摆动的吊挂部6在一定程度上消除防坠装置在摆动时所带来的惯性力,从而减少防坠装置在飞行时的摆幅,提高无人机的稳定性。
50.可以理解的是,对本领域普通技术人员来说,可以根据本发明的技术方案及其发明构思加以等同替换或改变,而所有这些改变或替换都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。