1.本发明涉及一种油层深度测量装置,特别是涉及一种含油污水在静置分层后的油层深度测量装置、一种含油污水在静置分层后的油层深度测量方法、一种基于油层深度测量装置的油水分离方法、一种基于油层深度测量装置的油水分离装置。
背景技术:
2.含油污水是生产生活中极为常见的污染源。如餐厨污水、道路污水、工厂排放污水中均存在大量油污。油是可以从污水中分离并回收的资源,具有极高的再利用价值。含油污水的一般分离方法包括沉降法、膜过滤法以及蒸馏法等。膜过滤法对于过滤膜的质量要求高,在实际油水分离中存在处理量较小、过滤膜易损坏的缺点。蒸馏法需要将污水加热到高于水的沸点,消耗能量大,油水分离的成本高。
3.在一般的沉降法去除油污的过程中,需要等待油水完全静置分层,成为上下两层澄清的液体(水层和油层),进而通过吸油或排水的方法完成油水分离。在含油污水静置分层的过程中,含油污水逐渐分为三层,即自上而下的油层、油水混合层和水层。其中,含油污水分层后的任意一层深度均难以实时监测,仅能通过人工测量油层深度,而人工测量油层深度的精确度较低、无法实时监测。因此,现有的沉降法难以对含油污水进行实时分离,也难以观察在油水分离过程中,随着油水混合层的减少,油水分离速率的变化状况。
技术实现要素:
4.基于此,有必要针对现有油水分离中,油层深度难以实时精确测量的问题,提供一种含油污水静置分层后的油层深度的测量与分离装置及方法。
5.本发明通过以下技术方案实现:一种基于浮力的油层深度测量装置包括:浮球、距离传感器、底座、三个滑块和三个导轨。
6.浮球为空心球体。浮球上可拆卸式连接一个透明窗。距离传感器安装在浮球的空腔内。距离传感器的探测方向经过透明窗。距离传感器与浮球的整体重心与所浮球的球心重合。三个滑块以浮球的球心为对称中心旋转对称设置并固定连接在浮球的外表面上。每个导轨均竖向设置,每个导轨与一个滑块滑动连接。导轨的顶端高于含油污水的最高液面。导轨的底端不高于含油污水中油层的最低底面。距离传感器的探测方向与三个滑块所在的平面垂直,以使距离传感器的探测方向始终竖直向上。
7.浮球、距离传感器和三个滑块的整体密度ρe满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
8.距离传感器竖直向上探测其自身与含油污水的液面的间距,进而根据浮球的球心与距离探测器的探测端的间距得到油层深度。则油层深度ho表达为:
其中,df为距离探测器的探测端与含油污水的液面的间距,h
m1
为浮球的球心与距离传感器的探测端的间距。
9.上述油层深度测量装置放置在含油污水中,由于含油污水在静置条件下受重力作用自然分层,形成自上至下的油层、油水混合层和水层,油层深度测量装置在重力作用下自动沉降到与其自身密度相同或接近的液体位置。则位于浮球1的球心下方的液体密度均大于油层深度测量装置的整体密度,而位于浮球1的球心上方的液体密度均小于油层深度测量装置的整体密度。通过距离传感器2测量其自身与油层液面的间距,进而计算出实际的油层深度。本实施例的油层深度测量装置可以根据含油污水的分层状态自动调节测量位置,并始终向上测量油层深度,具有操作简单便捷、结构稳固、测量精度高、实时性强、应用范围广的特点。
10.在其中一个实施例中,底座固定连接在三个导轨的底端。底座固定连接在污水处理池或污水处理箱的内壁上,以使三个导轨始终竖直向上。
11.本发明还提供一种含油污水在静置分层后的油层深度的测量方法,油层深度的测量方法包括如下步骤:步骤一:配置一个整体密度为ρe的油层深度测量装置。具体配置方法如下:a、获取油的密度。获取回收油的最大含水量即回收油中允许含水的最大体积占比。计算油层深度测量装置的整体密度。油层深度测量装置的整体密度ρe满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
12.b、称量距离传感器和三个滑块的整体重量me以及三个滑块的整体体积ve。计算满足整体密度条件的油层深度测量装置中浮球的体积和质量。进而将距离传感器和三个滑块按照上述油层深度测量装置的组装方式安装在浮球上。则浮球的质量m1与体积v1满足条件:。
13.步骤二:将油层测量装置安装在用于处理含油污水的箱体中,并在含油污水的液面上放置一个浮层。浮层的厚度小于0.2mm,浮层的密度小于油的密度。油层测量装置的具体安装方法如下:将油层测量装置的底座固定连接在用于处理含油污水的箱体内壁上,底座的上表面水平设置,以使三个导轨竖直向上。三个滑块分别与三个导轨滑动连接。浮球受重力作用在含油污水中沿导轨方向沉降至油层的底面。
14.步骤三:读取距离传感器与浮层的间距df,进而根据浮球的球心与距离探测器的探测端的间距得到油层深度。则油层深度ho表达为:其中, h
m1
为浮球的球心与距离传感器的探测端的间距。
15.本发明还提供一种基于油层深度测量装置的油水分离方法,其包括如下过程:s1:采用上述的油层深度的测量方法测量含油污水中的油层深度。其中,油层深度测量装置的整体密度ρ1满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
16.则油层深度ho表达为:其中, df为油层深度测量装置的距离传感器的探测端与含油污水液面的间距,h
m1
为油层深度测量装置的浮球的球心与油层深度测量装置的探测端的间距。
17.s2:判断油层深度是否大于一个预设的阈值一。是则对待处理的含油污水进行吸油直至油层深度小于一个预设的阈值二。
18.s3:采用一个整体密度为ρ2的水层深度测量装置测量含油污水中的水层深度。则水层深度测量装置的整体密度ρ2表达为:水层深度hw表达为:其中,ds为水层深度测量装置的距离传感器探测端与含油污水底面的间距,h
m2
为水层深度测量装置的距离传感器探测端与水层深度测量装置的浮球的球心的间距。
19.s4:判断水层深度是否大于一个预设的阈值三。是则从含油污水的底部进行排水直至水层深度小于一个预设的阈值四。
20.s5:测量含油污水的总深度。判断含油污水的总深度是否小于一个预设的阈值五。是则向含油污水中补充污水以使含油污水的总深度大于一个预设的阈值六。其中,补充的污水导入含油污水中的油水混合层中。
21.在其中一个实施例中,吸油的具体方法如下:s21:测量含油污水的总深度hs。
22.s22:计算含油污水中油层底面距离含油污水底面的高度h
os
。则h
os
表达为:。
23.s23:从一个高于含油污水中油层底面的位置进行吸油,直至油层深度小于一个预设的阈值二。
24.在其中一个实施例中,水层深度的具体测量方法如下:s31:配置一个整体密度为ρ2的水层深度测量装置。水层深度测量装置包括浮球二、距离传感器二、底座二、三个滑块二和三个导轨二。距离传感器二固定连接在浮球二的内腔中。三个滑块二以浮球二的球心为旋转中心对称设置在浮球二的外表面上。每个滑块二与一个导轨二滑动连接。每个导轨二均竖向设置。每个导轨二背向距离传感器二的探测方向的一端与底座二固定连接,以使距离传感器二的探测端始终竖直向下。
25.s32:将水层深度测量装置安装在用于处理含油污水的箱体中。
26.s33:读取距离传感器二与箱体内底面的间距ds,进而根据浮球二的球心与距离探测器二的探测端的间距得到水层深度。则水层深度hw表达为: 其中,ds为距离探测器二的探测端与含油污水底面的间距,h
m2
为距离探测器二的探测端与浮球二的球心的间距。
27.在其中一个实施例中,水层深度测量装置的具体安装方法如下:将底座二固定连
接在所述箱体的内壁上,底座二的下表面水平设置,以使三个导轨二竖直向上。浮球二受重力作用在含油污水中沿导轨二沉降至水层的顶面。
28.本发明还提供一种基于油层深度测量装置的油水分离装置,油水分离装置包括:外箱、油层深度测量装置、水层深度测量装置、距离传感器三、排水装置、吸油装置、加热器和控制器。
29.油层深度测量装置包括浮球一、距离传感器一、底座一、三个滑块一和三个导轨一。浮球一设置有用于收容距离传感器一的内腔。距离传感器的探测方向竖直向上。三个滑块一以浮球一的球心为旋转中心对称设置在浮球一的外表面上。每个滑块一与一个导轨一滑动连接。每个导轨一均竖向设置。每个导轨一的底端均与底座一固定连接。底座一水平安装在外箱内,以使距离传感器一的探测方向始终竖直向上。油层深度测量装置的整体密度ρ1为:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
30.水层深度测量装置包括浮球二、距离传感器二、底座二、三个滑块二和三个导轨二。距离传感器二固定连接在浮球二的内腔中。三个滑块二以浮球二的球心为旋转中心对称设置在浮球二的外表面上。每个滑块二与一个导轨二滑动连接。每个导轨二均竖向设置。每个导轨二背向距离传感器二的探测方向的二端与底座二固定连接。底座二水平安装在外箱内,以使距离传感器二的探测端始终竖直向下。水层深度测量装置的整体密度ρ2为:。
31.其中,μo为污水排放的最大含油量。
32.距离传感器三安装在外箱的顶部,用于实时测量外箱内的含油污水液面与外箱内顶面的间距。排水装置包括排水管和电子阀门,排水管与外箱的底部连通。电子阀门安装在排水管上,用于控制排水管与外箱的连通状态。吸油装置包括油泵、吸油管、油箱和驱动组件,吸油管的输出端与油泵的输入口连通,吸油管的输入端穿过外箱的顶部并与外箱连通。吸油管靠近外箱的一端设置为伸缩管。油泵的输出口通过管道与油箱连通。驱动组件的一端与吸油管的输入端固定连接,驱动组件的另一端与外箱固定连接。驱动组件用于驱动吸油管的输入端升降,以使吸油装置能在含油污水中的任意深度进行吸油。
33.在其中一个实施例中,加热器安装在外箱上,用于对外箱内的含油污水进行加热。
34.在其中一个实施例中,控制器分别与通信装置一、通信装置二、距离传感器三、电子阀门以及油泵连通。控制器用于:a、分别接收通信装置一和通信装置二传输的距离信号。采集距离传感器三实时测量的距离信号。根据相应的距离信号计算含油污水中的油层深度和水层深度。b、判断水层深度hw是否大于一个预设的阈值d1,是则打开电子阀门,直至hw小于一个预设的阈值d2。c、判断油层深度ho是否大于一个预设的阈值d3,是则计算吸油管入口端的理想高度,进而根据理想高度控制驱动组件驱动吸油管升降,启动油泵进行吸油,直至油层深度ho小于一个预设的阈值d4。d、判断污水液面与外箱内顶面的间距h3是否大于一个预设的阈值d5,是则控制打开电子阀门一,向外箱内导入含油污水,直至h3小于一个预设的阈值d6。
35.相较于现有技术,本发明具有如下有益效果:
1. 本发明的油层深度测量装置放置在含油污水中,由于含油污水在静置条件下受重力作用自然分层,形成自上至下的油层、油水混合层和水层,油层深度测量装置在重力作用下自动沉降到与其自身密度相同或接近的液体位置。则位于浮球的球心下方的液体密度均大于油层深度测量装置的整体密度,而位于浮球的球心上方的液体密度均小于油层深度测量装置的整体密度。通过距离传感器测量其自身与油层液面的间距,进而计算出实际的油层深度。本实施例的油层深度测量装置可以根据含油污水的分层状态自动调节测量位置,并始终向上测量油层深度,具有操作简单便捷、结构稳固、测量精度高、应用范围广的特点。
36.2.本发明的油水分离方法,可以根据油水分离的状态进行实时或间歇式的油水分离,同时动态补偿含油污水,以使在不影响原有污水静置分层的前提下,实现含油污水的分离与进水,进而提高油水分离的效率。同时,本实施例的油水分离方法可以对污水进行实时处理,解决现有的静置分层方法处理含油污水的局限性,提高油水分离的效率。
附图说明
37.图1为本发明实施例1的基于浮力的油层深度测量装置的立体结构示意图;图2为图1中基于浮力的油层深度测量装置的立体剖面结构示意图;图3为本发明实施例2中采用图1的基于浮力的油层深度测量装置的油层深度测量方法的步骤图;图4为本发明实施例3的采用图3中基于浮力的油层深度的测量方法的油水分离方法的步骤图;图5为本发明实施例4的基于油层深度测量装置的油水分离装置的剖面结构示意图;图6为图5中油层深度测量装置的剖面结构放大图;图7为图5中水层深度测量装置的剖面结构放大图。
38.主要元件符号说明图中标号为:1、浮球;11、透明窗;2、距离传感器;3、滑块;4、导轨;5、底座;10、外箱;20、距离传感器三;30、油层深度测量装置;301、浮球一;302、距离传感器一;303、滑块一;304、导轨一;305、底座一;40、水层深度测量装置;401、浮球二;402、距离传感器二;403、滑块二;404、导轨二;405、底座二;50、排水装置;501、排水管;502、电子阀门;60、吸油装置;601、驱动组件;602、吸油管;603、油泵;604、油箱;70、加热器。
39.以上主要元件符号说明结合附图及具体实施方式对本发明作进一步详细的说明。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.需要说明的是,当组件被称为“安装于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设
置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
42.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
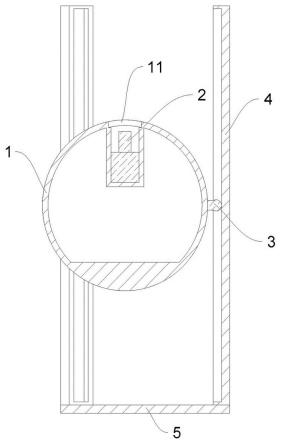
43.实施例1请参阅图1和图2,图1为本实施例的基于浮力的油层深度测量装置的立体结构示意图;图2为图1中基于浮力的油层深度测量装置的立体剖面结构示意图。基于浮力的油层深度测量装置包括:浮球1、距离传感器2、底座5、三个滑块3和三个导轨4。
44.浮球1为空心球体,距离传感器2安装在浮球1的空腔内。浮球1也可以是具有空腔的实心球体。浮球1可以采用金属材料,也可以采用陶瓷材料、塑料材料或复合材料等,只要具备足够的强度使得浮球1在测量过程中不产生形变,并具备较强的密封性能以使浮球1在测量中密度不变即可。浮球1上可拆卸式连接一个透明窗11。透明窗11设置在距离传感器2的探测方向上,以使距离传感器2能够穿过浮球1进行间距测量。透明窗11可以采用玻璃或塑料材料,只要不影响距离传感器2的测量精度即可。
45.距离传感器2与浮球1的整体重心与浮球1的球心重合。距离传感器2可以采用红外距离传感器、光学距离传感器等,只要能透过透明窗11探测探测其自身与目标物体间的相对距离即可。
46.三个滑块3以浮球1的球心为对称中心旋转对称设置并固定连接在浮球1的外表面上。三个滑块3的形状与重量均相等,当三个滑块3对称安装在浮球1上时,浮球1、距离传感器2及三个滑块3的整体重心保持与浮球1的球心重合。滑块3可以与浮球1一体成型,也可以是用于组装的独立部件。滑块3可以是圆柱体、球体或长方体等,滑块3的材料可以与浮球1相同,也可以是其他材料,只要能在测量过程中保持无形变即可。
47.每个导轨4均竖向设置,每个导轨4与一个滑块3滑动连接。导轨4的顶端高于含油污水的最高液面。导轨4的底端不高于含油污水中油层的最低底面。滑块3在导轨4上做升降移动,使得浮球1能够移动到任意高度的油层中。导轨4与滑块3的接触面光滑平整,且导轨4与滑块3的接触面积小于0.1mm2,同时导轨4与滑块3的摩擦系数可以忽略不计。在测量过程中,油层深度测量装置在含油污水中受到的重力与浮力差足以克服导轨4与滑块3的摩擦力,以使油层深度装置沉降到与其整体密度相等或接近的液体位置。在实际应用中,导轨4和滑块3可以采用相对摩擦系数小的材料,以减小摩擦力对检测结果的干扰。如导轨4和滑块3可以同时采用石墨或聚四氟乙烯材料等,也可以选择摩擦系数小的金属材料。部分金属材料在油水混合液体中,相对摩擦系数会降低,如铜、铁、铝、镉等。
48.距离传感器2的探测方向与三个滑块3所在的平面垂直,以使距离传感器2的探测方向始终竖直向上。导轨4与用于处理含油污水的容器内壁固定连接,以使滑块3在含油污水中技能做升降运动,同时对滑块3和浮球1进行限位,使得浮球1仅能做升降运动,以使距离传感器2的探测方向始终不变。
49.含油污水在静置分层的过程中自上而下分为油层、油水混合层和水层。其中,油层的密度最小,水层的密度最大。油水混合层中,液体密度自上而下逐渐增大。油层深度测量
装置需要探测油层深度,则必须先确定油层与油水混合层的分界面。
50.在理想状态下,物体在液体中受到重力和浮力两种作用力,当物体的重力等于受到的浮力时,物体悬浮或漂浮在液体中。在含油污水中,只要浮球1能够悬浮在油层与油水混合层的分界面上,则可以通过距离传感器2测量出油层的深度。因此,浮球1、距离传感器2和三个滑块3的整体密度需要接近并大于油的密度。
51.根据回收油中允许的最大含水量,可以计算出浮球1、距离传感器2和三个滑块3的整体密度ρe的满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
52.如,当油的密度为0.8g/cm3且回收油中允许的最大含水量为5%时,浮球1、距离传感器2和三个滑块3的整体密度ρe为0.05*1+0.95*0.8=0.81 g/cm3。
53.将一个ρe=0.81 g/cm3的油层测量装置安装在用于处理含油污水的容器中,则油层深度测量装置自动沉降至油层下方靠近油层底面的位置处。位于浮球1的球心上方的液体密度均不大于0.81 g/cm3,位于浮球1的球心下方的液体密度则不小于0.81 g/cm3。则浮球1的球心上方的液体可视为油层。
54.在实际安装的过程中,距离传感器2的探测端难以在其自身重心与浮球1的球心重合的同时,距离传感器2的探测端也与浮球1的球心重合。因此,距离传感器2探测的其自身与油层液面的间距并非油层的实际深度。因此,可以先测量距离传感器2探测端与浮球1的球心的间距,进而通过读取距离传感器2的间距数据计算实际的油层深度。
55.距离传感器2竖直向上探测其自身与含油污水的液面的间距,进而根据浮球1的球心与距离探测器的探测端的间距得到油层深度。则油层深度ho表达为:其中,df为距离探测器的探测端与含油污水的液面的间距,h
m1
为浮球1的球心与距离传感器2的探测端的间距。
56.底座5固定连接在三个导轨4的底端。底座5固定连接在污水处理池或污水处理箱的内壁上,以使三个导轨4始终竖直向上。底座5可以是圆形板、三角板等实心板,也可以是环形板、三角支架等空心板,只要能对三个导轨4提供支撑并使得三个导轨4平行设置即可。当底座5为实心板时,底座5需要安装在导轨4背向距离传感器2探测端的一端上。当底座5为空心板时,底座5可以安装在导轨4的任意一端,只要不遮挡距离传感器2的探测路径即可。
57.本实施例提供的油层深度测量装置放置在含油污水中,由于含油污水在静置条件下受重力作用自然分层,形成自上至下的油层、油水混合层和水层,油层深度测量装置在重力作用下自动沉降到与其自身密度相同或接近的液体位置。则位于浮球1的球心下方的液体密度均大于油层深度测量装置的整体密度,而位于浮球1的球心上方的液体密度均小于油层深度测量装置的整体密度。通过距离传感器2测量其自身与油层液面的间距,进而计算出实际的油层深度。本实施例的油层深度测量装置可以根据含油污水的分层状态自动调节测量位置,并始终向上测量油层深度,具有操作简单便捷、结构稳固、测量精度高、应用范围广的特点。
58.实施例2
请参阅图3,其为本实施例中采用图1的基于浮力的油层深度测量装置的油层深度测量方法的步骤图。本实施例提供一种含油污水在静置分层后的油层深度的测量方法,油层深度的测量方法包括如下步骤:步骤一:配置一个密度为ρe的油层深度测量装置(在测量过程中,导轨和底座相对静止,因此,导轨和底座不计入整体密度中)。具体配置方法如下:a、获取油的密度。获取回收油的最大含水量即回收油中允许含水的最大体积占比。计算油层深度测量装置的整体密度。油层深度测量装置的整体密度ρe满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
59.本实施例中,油的密度为0.9 g/cm3,将回收油的最大含水量设置为5%,则油层深度测量装置的整体密度为0.905g/cm3。
60.b、称量距离传感器和三个滑块的整体重量me以及三个滑块的整体体积ve。计算满足整体密度条件的油层深度测量装置中浮球的体积和质量。进而将三个滑块和距离传感器分别安装在浮球上。其中,距离传感器安装在浮球的内腔中,距离传感器的重心与浮球的球心重合。三个滑块以浮球的球心为对称中心旋转对称设置在浮球的外表面上,以使油层深度测量装置的整体重心与浮球的球心重合。
61.根据密度计算公式ρ=m/v,可知浮球的质量m1与体积v1满足条件:。
62.步骤二:将油层测量装置安装在用于处理含油污水的箱体中,并在含油污水的液面上放置一个浮层。浮层的厚度小于0.2mm,浮层的密度小于油的密度。距离传感器难以直接测量其与油层液面的间距,因此通过浮层的底面代替油层液面。浮层漂浮在油层液面上,由于浮层的厚度小、密度小,对油层液面高度几乎无影响,可以将浮层的底面视为油层液面。距离传感器可以直接探测其与浮层的间距作为距离传感器与油层液面的间距。
63.油层测量装置的具体安装方法如下:将油层测量装置的底座固定连接在用于处理含油污水的箱体内壁上,底座的上表面水平设置,以使三个导轨竖直向上。三个滑块在同一水平面上分别与三个导轨滑动连接,以使距离传感器的探测方向竖直向上。浮球受重力作用在含油污水中沿导轨方向沉降至油层的底面。
64.步骤三:读取距离传感器与浮层的间距df,进而根据浮球的球心与距离探测器的探测端的间距得到油层深度。在实际安装的过程中,距离传感器的探测端难以在其自身重心与浮球的球心重合的同时,距离传感器的探测端也与浮球的球心重合。距离传感器探测的其自身与油层液面的间距并非油层的实际深度。因此,可以先测量距离传感器探测端与浮球的球心的间距,进而通过读取距离传感器的间距数据计算实际的油层深度。
65.则油层深度ho表达为:其中,h
m1
为浮球的球心与距离传感器的探测端的间距。
66.本实施例的油层深度测量方法,根据待测量的含油污水中油的密度设置油层深度测量装置的整体密度,进而实现在不同油类与水混合而成的含油污水中,精确测量油层的
实时深度,具有操作简单便捷、结构稳固、测量精度高、应用范围广的特点。
67.实施例3请参阅图4,其为本实施例的采用图3中基于浮力的油层深度的测量方法的油水分离方法的步骤图。根据实施例2的油层深度的测量方法能,可以将实施例1中的油层深度测量装置应用在含油污水的油水分离中。本实施提供一种基于油层深度测量装置的油水分离方法。油水分离方法包括如下步骤:s1:采用实施例2中的油层深度测量方法测量含油污水中的油层深度。其中,油层深度测量装置的整体密度ρ1满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
68.则油层深度ho表达为:其中, df为油层深度测量装置的距离传感器的探测端与含油污水液面的间距,h
m1
为油层深度测量装置的浮球的球心与油层深度测量装置的探测端的间距。
69.在其他实施例中,若含油污水收容在密闭容器(如污水处理箱等)内,则可以直接通过油层深度测量装置测量其探测端与密闭容器的内顶面的间距,并通过其他间距测量装置测量污水液面与密闭容器的内顶面的间距,进而得到油层的深度。
70.s2:判断油层深度是否大于一个预设的阈值一。是则对待处理的含油污水进行吸油直至油层深度小于一个预设的阈值二。
71.当油层深度ho大于阈值一时,表明含油污水在静置后完成部分分层,油层的深度已达到预设的回收标准。
72.其中,吸油的具体方法如下:s21:测量含油污水的总深度hs。含油污水的总深度可以通过液位计或距离传感器来测量。其中,采用距离传感器时,可以将距离传感器安装在用于处理含油污水的容器底部,通过距离传感器测量其自身与含油污水液面上的浮层的间距作为含油污水的总深度。
73.s22:计算含油污水中油层底面距离含油污水底面的高度h
os
。则h
os
表达为:。
74.s23:从一个高于含油污水中油层底面的位置进行吸油,直至油层深度小于一个预设的阈值二。从高于油层底部一个阈值二的位置处对油层进行回收,以避免将尚未分层的油水混合层回收到储油装置中,保持回收油中的含水量始终低于预设的最大含水量(如5%)。由于回收的油层中任意位置处的含水量均不高于最大含水量,实际回收油的含水量远低于最大含水量(如实际排放的含水量低于1%)。
75.s3:采用一个整体密度为ρ2的水层深度测量装置测量含油污水中的水层深度。水层深度测量装置在探测水层深度时,需要先确定水层与油水混合层的分界面。在含油污水中,只要水层深度测量装置能够悬浮在水层与油水混合层的分界面上,则可以通过距离传感器测量出水层的深度。因此,水层深度测量装置中的浮球二、距离传感器二和三个滑块二的整体密度需要接近并小于水的密度。
76.则水层深度测量装置的整体密度ρ2表达为:。
77.其中,μo为污水排放允许的最大含油量。
78.本实施例中,设μo为5%,则水层深度测量装置的整体密度ρ2为0.995 g/cm3。
79.水层深度的具体测量方法如下:s31:配置一个整体密度为ρ2的水层深度测量装置(仅计算浮球二、距离传感器二和三个滑块二的整体密度)。水层深度测量装置包括浮球二、距离传感器二、底座二、三个滑块二和三个导轨二。距离传感器二固定连接在浮球二的内腔中。三个滑块二以浮球二的球心为旋转中心对称设置在浮球二的外表面上。每个滑块二与一个导轨二滑动连接。每个导轨二均竖向设置。每个导轨二背向距离传感器二的探测方向的二端与底座二固定连接,以使距离传感器二的探测端始终竖直向下。
80.水层深度测量装置与油层深度测量装置的结构类似,区别在于,水层深度测量装置中距离传感器的探测方向始终竖直向下,而油层深度测量装置中距离传感器的探测方向始终竖直向上。水层深度测量装置的整体密度趋近于水,而油层深度测量装置的整体密度趋近于油。
81.s32:将水层深度测量装置安装在用于处理含油污水的箱体中。水层深度测量装置的具体安装方法如下:将底座二固定连接在箱体的内壁上,底座二的下表面水平设置,以使三个导轨二竖直向上。每个滑块二与一个导轨二滑动连接,且三个滑块二位于同一水平面上,以使距离传感器二的探测方向始终竖直向下。浮球二受重力作用在含油污水中沿导轨二沉降至水层的顶面。
82.s33:读取距离传感器二与箱体内底面的间距ds,进而根据浮球二的球心与距离探测器二的探测端的间距得到水层深度。
83.与油层深度测量装置类似的是,在水层深度测量装置实际安装的过程中,距离传感器二的探测端难以在其自身重心与浮球二的球心重合的同时,距离传感器二的探测端也与浮球二的球心重合。距离传感器二探测的其自身与油层液面的间距并非油层的实际深度。因此,可以先测量距离传感器二的探测端与浮球二的球心的间距,进而通过读取距离传感器二的间距数据计算实际的油层深度。
84.水层深度hw表达为:其中,ds为水层深度测量装置的距离传感器探测端与含油污水底面的间距,h
m2
为水层深度测量装置的距离传感器探测端与水层深度测量装置的浮球的球心的间距。
85.s4:判断水层深度是否大于一个预设的阈值三。是则从含油污水的底部进行排水直至水层深度小于一个预设的阈值四。
86.当水层深度hw大于阈值三时,表明含油污水在静置后完成部分分层,水层的深度已达到预设的排放标准。从污水处理箱的底部对污水进行排放,以避免将尚未分层的油水混合层排放出去。当水层深度hw小于阈值四时,由于在排放过程中污水在靠近排放口的位置处的水流量大于其他位置处的水流量,若将水层完全排放,即便排放速度低也依然会导致油水混合层部分混入已分层的水层中。因此,在预留一定深度(阈值四)后,可以保持排出
的污水中,含油量始终低于排放标准(如5%)。由于排放的水层中任意位置处的含油量不高于排放标准,实际排放的含油量远低于排放标准(如实际排放污水的含油量低于1%)。
87.s5:测量含油污水的总深度。判断含油污水的总深度是否小于一个预设的阈值五。是则向含油污水中补充污水以使含油污水的总深度大于一个预设的阈值六。其中,补充的污水导入含油污水中的油水混合层中。
88.在对含油污水进行排水或吸油后,污水液面下降。通过向污水处理箱中继续添加含油污水,以使污水处理箱中的污水量保持在一个预设的范围内,提高污水分层的效率。需要注意的是,污水应当从油水混合层的深度范围内导入,避免对已分层的水层和油层造成干扰。在实际应用中,可以根据预设的水层深度及油层深度判断油水混合层的一般深度,进而将含油污水的进水口设置在污水处理箱的中部,以满足在污水进水时始终导入油水混合层内。
89.此外,还可以对污水处理箱进行持续导入含油污水,以使污水处理箱中的含油污水达到动态平衡,即在排水、吸油及进水之间形成平衡,以使污水处理箱内的含油污水总量始终处于一个预设的范围内,从而实现对含油污水的实时处理。
90.含油污水在重力作用下静置分层,其中,油层的密度最小,位于污水的最上层。水层的密度最大,位于污水的最下层。油层与水层之间则为油水混合层,其密度自上而下逐渐增加。
91.采用油层深度测量装置和水层深度测量装置分别检测油层与水层的深度。在本实施例中,油层深度测量装置的整体密度为0.9~0.905g/cm3。将油层深度测量装置放置于含油污水中,则油层深度测量装置自动沉降至靠近于油层的最底面。位于第一定向装置重心上方的液体密度均小于0.905,即处于第一定向装置重心上方任意一处的油层含水量不高于5%(设油层回收的标准含水量不高于5%)。设油层深度测量装置中,距离传感器一的探测端与油层深度测量装置的重心的间距为h
m1
,通过距离传感器一探测其自身与油层顶面(实际探测如在油层顶面放置的漂浮物)的间距ho,或探测距离传感器与污水处理箱顶面的间距h1,并通过安装在污水处理箱顶面的其他距离传感装置测量油层顶面与污水处理箱顶面的间距h3,进而得到油层的实际深度ho=h1 h
m1
-h3。
92.水层深度测量装置的整体密度处于0.995~1g/cm3。将水层深度测量装置放置于含油污水中。第二定向装置在含油污水中下沉至接近于水层的最顶面。其中,位于第二定向装置重心下方的液体密度均大于0.995g/cm3,即在第二定向装置重心下方任意一处的污水含油量不高于5%(设污水排放的标准含油量不高于5%)。设水层深度测量装置中,距离传感器二的探测端与水层深度测量装置的重心的间距为h
m2
,通过水层深度测量装置的距离传感器探测其自身与含油污水底面(实际探测污水处理箱或污水处理池的底面)的间距h2,得到水层的实际深度hw=h2 h
m2
。
93.本实施例提供的油水分离方法,可以根据油水分离的状态进行实时或间歇式的油水分离,同时动态补偿含油污水,以使在不影响原有污水静置分层的前提下,实现含油污水的分离与进水,进而提高油水分离的效率。同时,本实施例的油水分离方法可以对污水进行实时处理,解决现有的静置分层方法处理含油污水的局限性,提高油水分离的效率。
94.实施例4请参阅图5,其为本实施例的基于油层深度测量装置的油水分离装置的剖面结构
示意图。为了实现实施例3中的油水分离方法,本实施例提供一种基于油层深度测量装置的油水分离装置。油水分离装置包括:外箱10、油层深度测量装置30、水层深度测量装置40、距离传感器三20、排水装置50、吸油装置60、加热器70和控制器。
95.外箱10可以为空心的长方体、圆柱体等。外箱10的中心位置处连通一个进水管,含油污水通过进水管导入外箱10内。本实施例中,外箱10为空心长方体,外箱10的内高度(外箱10内顶面与内底面的间距)为2m。当然,在其他实施例中,外箱10的内高度还可以更高或者更低,外箱10也可以替换为污水处理池等。
96.请结合图6,其为图5中油层深度测量装置的剖面结构放大图。油层深度测量装置30包括浮球一301、距离传感器一302、底座一305、三个滑块一303和三个导轨一304。浮球一301为空心球体,距离传感器一302安装在浮球一301的空腔内。浮球一301上可拆卸式连接一个透明窗一。透明窗一设置在距离传感器一302的探测方向上,以使距离传感器一302能够穿过浮球一301进行间距测量。距离传感器一302与浮球一301的整体重心与浮球一301的球心重合。三个滑块一303以浮球一301的球心为对称中心旋转对称设置并固定连接在浮球一301的外表面上。三个滑块一303的形状与重量均相等,当三个滑块一303对称安装在浮球一301上时,浮球一301、距离传感器一302及三个滑块一303的整体重心保持与浮球一301的球心重合。
97.每个导轨一304均竖向设置,每个导轨一304与一个滑块一303滑动连接。导轨一304的顶端高于含油污水的最高液面。导轨一304的底端不高于含油污水中油层的最低底面。滑块一303在导轨一304上做升降移动,使得浮球一301能够移动到任意高度的油层中。导轨一304与滑块一303的接触面光滑平整,且导轨一304与滑块一303的接触面积小于0.1mm2,同时导轨一304与滑块一303的摩擦系数可以忽略不计。在测量过程中,油层深度测量装置30在含油污水中受到的重力与浮力差足以克服导轨一304与滑块一303的摩擦力,以使油层深度装置沉降到与其整体密度相等或接近的液体位置。
98.距离传感器一302的探测方向与三个滑块一303所在的平面垂直,以使距离传感器一302的探测方向始终竖直向上。导轨一304与用于处理含油污水的容器内壁固定连接,以使滑块一303在含油污水中技能做升降运动,同时对滑块一303和浮球一301进行限位,使得浮球一301仅能做升降运动,以使距离传感器一302的探测方向始终不变。
99.底座一305固定连接在三个导轨一304的底端。底座一305固定连接在污水处理池或污水处理箱的内壁上,以使三个导轨一304始终竖直向上。
100.根据回收油中允许的最大含水量,可以计算出浮球一301、距离传感器一302和三个滑块一303的整体密度ρ1的满足条件:其中,μw为回收油的最大含水量,ρw为水的密度,ρo为油的密度。
101.距离传感器一302竖直向上探测其自身与含油污水的液面的间距,进而根据浮球一301的球心与距离探测器的探测端的间距得到油层深度。则油层深度ho表达为:其中,df为距离探测器的探测端与含油污水的液面的间距,h
m1
为浮球一301的球心
与距离传感器一302的探测端的间距。
102.请结合图7,其为图5中水层深度测量装置的剖面结构放大图。水层深度测量装置40包括浮球二401、距离传感器二402、底座二405、三个滑块二403和三个导轨二404。浮球二401为空心球体,距离传感器二402安装在浮球二401的空腔内。浮球二401上可拆卸式连接一个透明窗二。透明窗二设置在距离传感器二402的探测方向上,以使距离传感器二402能够穿过浮球二401进行间距测量。距离传感器二402与浮球二401的整体重心与浮球二401的球心重合。三个滑块二403以浮球二401的球心为对称中心旋转对称设置并固定连接在浮球二401的外表面上。三个滑块二403的形状与重量均相等,当三个滑块二403对称安装在浮球二401上时,浮球二401、距离传感器二402及三个滑块二403的整体重心保持与浮球二401的球心重合。
103.每个导轨二404均竖向设置,每个导轨二404与一个滑块二403滑动连接。导轨二404的顶端高于含油污水中水层的最高液面。导轨二404的底端不高于含油污水的最低底面。滑块二403在导轨二404上做升降移动,使得浮球二401能够移动到任意高度的水层中。导轨二404与滑块二403的接触面光滑平整,且导轨二404与滑块二403的接触面积小于0.1mm2,同时导轨二404与滑块二403的摩擦系数可以忽略不计。在测量过程中,水层深度测量装置40在含油污水中受到的重力与浮力差足以克服导轨二404与滑块二403的摩擦力,以使水层深度测量装置40沉降到与其整体密度相等或接近的液体位置。
104.距离传感器二402的探测方向与三个滑块二403所在的平面垂直,以使距离传感器二402的探测方向始终竖直向下。导轨二404与用于处理含油污水的容器内壁固定连接,以使滑块二403在含油污水中仅能做升降运动,同时对滑块二403和浮球二401进行限位,使得浮球二401仅能做升降运动,以使距离传感器二402的探测方向始终不变。
105.底座二405固定连接在三个导轨二404的底端。底座二405固定连接在污水处理池或污水处理箱的内壁上,以使三个导轨二404始终竖直向下。
106.根据回收油中允许的最大含水量,可以计算出浮球二401、距离传感器二402和三个滑块二403的整体密度ρ2的满足条件:其中,μw为污水排放的最大含油量,ρw为水的密度,ρo为油的密度。
107.距离传感器二402竖直向下探测其自身与含油污水的底面的间距,进而根据浮球二401的球心与距离探测器的探测端的间距得到水层深度。水层深度hw表达为: 其中,ds为水层深度测量装置40的探测端与含油污水底面的间距,h
m2
为水层深度测量装置40的探测端与水层深度测量装置40的重心的间距。。
108.外箱10内的含油污水在静置后自动分层,即从上至下的油层、油水混合层和水层。其中,油层的密度约为0.9g/cm3,水层的密度约为1g/cm3。油水混合层的密度则处于0.9~1g/cm3之间,且油水混合层的密度由上至下逐渐增加。
109.将油层深度测量装置30和水层深度测量装置40共同放置在外箱10内。受到重力作用,油层深度测量装置30的重心趋近于油层的底面,距离传感器一303竖直向上,用于检测其探测端与外箱10内顶面的间距h1。水层深度测量装置40的重心趋近于水层的顶面,距离
传感器二403竖直向下,用于检测其探测端与外箱10内底面的间距h2。
110.距离传感器三20安装在外箱10的内顶面上,用于实时监测其自身与污水液面的间距,也即污水液面与外箱10顶面的间距h3。距离传感器一303、距离传感器二403和距离传感器三20可以采用红外距离传感器、光学距离传感器或超声波距离传感器等,只要能测量其自身与待测量物体间的相对距离即可。
111.设油层深度测量装置30中,距离传感器一303的探测端与油层深度测量装置30的重心的间距为h
m1
,则油层深度ho可以表示为:ho=h1+h
m1
-h3。
112.设水层深度测量装置40中,距离传感器二403的探测端与水层深度测量装置40的重心的间距为h
m2
,则水层深度hw可以表示为:hw=h2-h
m2
。
113.排水装置50包括排水管501和电子阀门502。排水管501与外箱10的底部连通。电子阀门502安装在排水管501上,用于控制排水管501与外箱10的连通状态。
114.吸油装置60包括油泵603、吸油管602、油箱604和驱动组件601。吸油管602的输出端与油泵603的输入口连通,吸油管602的输入端穿过外箱10的顶部并与外箱10连通。吸油管602靠近外箱10的一端设置为伸缩管。油泵603的输出口通过管道与油箱604连通。驱动组件601的一端与吸油管602的输入端固定连接,驱动组件601的另一端与外箱10固定连接。驱动组件601用于驱动吸油管602的输入端升降,以使吸油装置60能在含油污水中的任意深度进行吸油。驱动组件601可以是电缸、电动伸缩杆等,驱动组件601可以根据预设的升降距离驱动吸油管602升降,进而通过油泵603将污水中的油层泵入油箱604内。
115.加热器70安装在外箱10上,用于对外箱10内的含油污水加热。加热器70可以是碳纤维加热器70、红外加热器70或电磁加热器70等。本实施例中采用红外加热器70,红外加热器70可以对含油污水进行无接触加热,可以避免油污附着,保持高效的加热及保温效果。
116.控制器分别与通信装置一304、通信装置二404、距离传感器三20、电子阀门502以及油泵603连通。控制器用于:a、分别接收通信装置一304和通信装置二404传输的距离信号。采集距离传感器三20实时测量的距离信号。根据相应的距离信号计算含油污水中的油层深度和水层深度。则油层深度ho和水层深度hw分别表示为:其中,h1为距离传感器一303的探测端与外箱10内顶面的间距,h
m1
为距离传感器一303的探测端与油层深度测量装置30的重心的间距,h2为距离传感器二403的探测端与外箱10内底面的间距,h
m2
为距离传感器二403的探测端与水层深度测量装置40的重心的间距。
117.b、判断水层深度hw是否大于一个预设的阈值d1,是则打开电子阀门502,直至hw小于一个预设的阈值d2。
118.当hw大于一个预设的阈值d1时,表明含油污水在静置后完成部分分层,水层的深度已达到预设的排放标准。从污水处理箱的底部对污水进行排放,以避免将尚未分层的油水混合层排放出去。当hw小于阈值d2时,由于在排放过程中污水在靠近排放口的位置处的水流量大于其他位置处的水流量,即便排放速度低,依然会导致油水混合层部分混入已分层的水层中。因此,在预留一定深度后d2,可以保持排出的污水中,含油量低于排放标准(如5%)。
由于排放的水层中任意位置处的含油量不高于排放标准,实际排放的含油量远低于排放标准(如实际排放的含油量低于1%)。
119.c、判断油层深度ho是否大于一个预设的阈值d3,是则计算吸油管602入口端的理想高度,进而根据理想高度控制驱动组件601驱动吸油管602升降,启动油泵603进行吸油,直至油层深度ho小于一个预设的阈值d4。
120.当ho大于阈值d3时,表明含油污水在静置后完成部分分层,油层的深度已达到预设的回收标准。从污水液面的顶端向下进行吸油,或者直接将吸油管602道的入口端竖直向下移动至预设的高度,即距离污水处理箱内顶面ds=s-h1-h
m1
+d4(s为污水处理箱中内顶面与内底面的间距)位置处,避免将油水混合层部分的液体吸入油箱604,减小回收油中的含水量。当油层深度ho小于一个预设的阈值d4时,停止吸油,以避免回收的油层中含水量超出标准(如5%)。
121.d、判断污水液面与外箱10内顶面的间距h3是否大于一个预设的阈值d5,是则控制打开电子阀门502一,向外箱10内导入含油污水,直至h3小于一个预设的阈值d6。
122.在对含油污水进行排水或吸油后,污水液面下降。可以向污水处理箱中继续添加含油污水,以使污水处理箱中的污水量保持在一个预设的范围内,提高污水分层的效率。需要注意的是,污水应当从油水混合层的深度范围内导入,避免对已分层的水层和油层造成干扰。在实际应用中,可以根据预设的水层深度及油层深度判断油水混合层的一般深度,进而将含油污水的进水口设置在污水处理箱的中部,以满足在污水进水时始终导入油水混合层内。
123.此外,通过控制器统计并计算污水处理的效率,还可以对污水处理箱进行持续导入含油污水,以使污水处理箱中的含油污水达到动态平衡,即在排水、吸油及进水之间形成平衡,以使污水处理箱内的含油污水量始终处于一个预设的范围内,从而实现对含油污水的实时处理。
124.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
125.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。