技术特征:
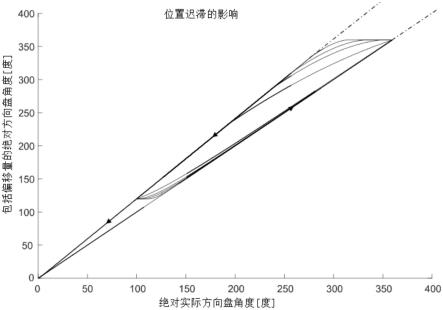
1.控制道路车辆的线控转向系统(1)的方法,其中,所述线控转向系统(1)包括与转向轴(2)耦接的方向盘(3),用于转动可转向的车轮(4)的车轮致动器(5),用于检测所述转向轴(2)的转动的轴传感器,以及控制单元(10),所述控制单元(10)用于根据所述轴传感器检测的信号计算所述车轮致动器(5)的操作信号,其特征在于,所述方法包括以下步骤:通过所述轴传感器确定实际方向盘角度(α);通过应用人工迟滞来修改实际方向盘角度(α),所述人工迟滞在实际方向盘角度(α)和修改后的方向盘角度(α
mod
)之间产生偏移量,以模仿机电动力转向机构的行为;以及根据所述修改后的方向盘角度(α
mod
),计算用于所述车轮致动器(5)的电机转矩请求。2.根据权利要求1所述的方法,其特征在于,所述人工迟滞只能导致所述修改后的方向盘角度(α
mod
)的绝对值等于或大于所述实际方向盘角度(α)的绝对值。3.根据权利要求1或2所述的方法,其特征在于,所述修改后的方向盘角度(α
mod
)的数值变化与所述实际方向盘角度(α)的数值变化之间的符号是不相反的。4.根据前述的任一项权利要求所述的方法,其特征在于,所述偏移量受最大偏移量的限制,所述偏移量由人工扭转率参数定义,所述人工扭转率参数描述所述实际方向盘角度(α)和所述偏移量之间的线性关系。5.根据权利要求4所述的方法,其特征在于,所述最大偏移量取决于与车辆速度有关的参数。6.根据前述权利要求之一所述的方法,其特征在于,对于实际方向盘角度(α)的绝对值从0
°
到预定的终点值(v1),所述偏移量为零。7.根据权利要求6所述的方法,其特征在于,所述起始值(v1)位于绝对实际方向盘角度(α)的0
°
至15
°
之间的范围内。8.根据权利要求6或7所述的方法,其特征在于,所述最大偏移量从终点值(v1)线性增加至最大方向盘角度。9.根据权利要求8所述的方法,其特征在于,在转向到锁止位置的过程中,所述偏移量从实际偏移量减少到零偏移量。10.根据权利要求9所述的方法,其特征在于,减少量是可调整的。11.根据权利要求8或9所述的方法,其特征在于,在达到所述零偏移量后,所述零偏移量被用作在方向盘转动到更大的绝对实际方向盘角度(α)的过程中的实际偏移量。12.根据前述权利要求4至11之一所述的方法,其特征在于,在转动回中心的过程中,所述偏移量的绝对值增加至实际最大偏移量。13.根据权利要求12所述的方法,其特征在于,所述增加的特征是可调整的。14.根据权利要求12或13所述的方法,其特征在于,一旦达到所述最大偏移量,当返回时,所述实际最大偏移量被用作返回到终点值(v1)的其余转向操作的实际偏移量。15.用于道路车辆的线控转向系统(1),所述线控转向系统(1)包括车轮致动器(5)和控制单元(10),所述控制单元(10)计算所述车轮致动器(5)的操作信号,其中,所述控制单元(10)被设计为执行根据权利要求1至14所述的方法。16.根据权利要求15所述的线控转向系统,其特征在于,所述车轮致动器(5)通过齿条齿轮装置(7)操作齿条(6),所述齿条是前轮轴(8)的一部分。17.根据权利要求15或16所述的线控转向系统,其特征在于,所述控制单元(10)包括位
置控制器,所述位置控制器根据所述齿条(6)的实际位置和请求的齿条位置,计算电机转矩请求,其中,请求的齿条位置取决于修改后的方向盘角度(α
mod
)。
技术总结
本发明涉及一种用于控制道路车辆的线控转向系统(1)的方法,其中,所述线控转向系统(1)包括与转向轴(2)耦接的方向盘(3),用于转动可转向的车轮(4)的车轮致动器(5),用于检测所述转向轴(2)的转动的轴传感器,以及控制单元(10),所述控制单元(10)用于根据所述轴传感器检测的信号计算所述车轮致动器(5)的操作信号,其中,所述方法包括以下步骤:通过所述轴传感器确定实际方向盘角度(α);通过应用人工迟滞来修改实际方向盘角度(α),所述人工迟滞在实际方向盘角度(α)和修改后的方向盘角度(α
技术研发人员:渡边芳信 判治宗嗣 K
受保护的技术使用者:本田技研工业株式会社
技术研发日:2020.04.20
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。