1.本发明属于风洞试验设备和模型动态、静态支撑技术领域技术领域,更具体地说,本发明涉及一种大型高超声速高温风洞模型送进系统的偏航机构。
背景技术:
2.在进行相关风洞试验时,需要有模型送进系统将模型从试验段的吊舱内快速垂直运送到预定的流场区域位置并锁紧,在实验完成后再将模型快速退出流场,最终模型停止在试验段吊舱内。模型坐标系定义如下:坐标系原点o位于喷管出口截面与扩压器入口截面轴线的中点,设备流场轴向为x方向(指向扩压器),竖直向上方向为y方向,在xy轴平面上模型轴线与流场轴线的夹角为俯仰角α,在xz轴平面上模型轴线与流场轴线的夹角为偏航角β。模型气动载荷参数定义依据航空类和航天类国家标准gb/t 16638-2008坐标轴系的规定。
3.在送进系统中,偏航方向是送进系统四个自由度中的一个,因此需要相关的结构设置能够实现模型偏航方向的调节定位。
技术实现要素:
4.本发明的一个目的是解决上述问题和/或缺陷,并提供后面将说明的优点。
5.为了实现根据本发明的这些目的和优点,提供了一种大型高超声速高温风洞模型送进系统的偏航机构,包括:滑座,其上表面安装有圆弧导轨,所述滑座上表面的中部还设置有旋转旋心,所述滑座的上表面还安装有偏航连接座;偏航旋转体,其下表面安装有偏航导轨滑块,所述偏航导轨滑块滑动设置在所述圆弧导轨上,所述偏航旋转体通过交叉滚子轴承与旋转旋心转动连接;偏航驱动油缸,其缸体端部与所述偏航连接座转动连接,所述偏航驱动油缸的活塞杆与偏航旋转体的旋转连接座转动连接。
6.优选的是,其中,所述偏航旋转体的后端设置有呈弧形结构的偏航导向夹紧条,所述滑座上的凸台上通过u型安装座安装有多个成弧形排布的偏航液压锁紧油缸,所述偏航液压锁紧油缸的两个偏航夹紧片分别与所述偏航导向夹紧条相抵接。
7.优选的是,其中,所述偏航旋转体的后端还安装有偏航电动缸,所述偏航电动缸的伸缩杆固定连接有偏航定位销,所述滑座上设置有与偏航定位销相适配的偏航定位孔。
8.优选的是,其中,所述偏航机构内还设置有偏航检测机构,所述偏航检测机构包括:轴承支撑体,其固定安装在所述滑座上;编码器支架,其固定安装在所述轴承支撑体的内部,所述编码器支架内安装有偏航检测编码器,所述偏航检测编码器通过联轴器ⅰ连接有检测轴,所述检测轴通过轴承与所述编码器支架转动连接;
所述偏航旋转体内固定连接有检测轴支架,所述检测轴通过胀套固定在检测轴支架内。
9.优选的是,其中,所述偏航导向夹紧条的弧度与圆弧导轨相同。
10.优选的是, 其中,所述偏航旋转体的前端安装有用于安装俯仰驱动油缸的油缸安装座。
11.本发明至少包括以下有益效果:本发明通过偏航驱动油缸驱动偏航旋转体沿圆弧导轨运动,实现了模型偏航角调节和任意位置锁紧的功能。
12.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
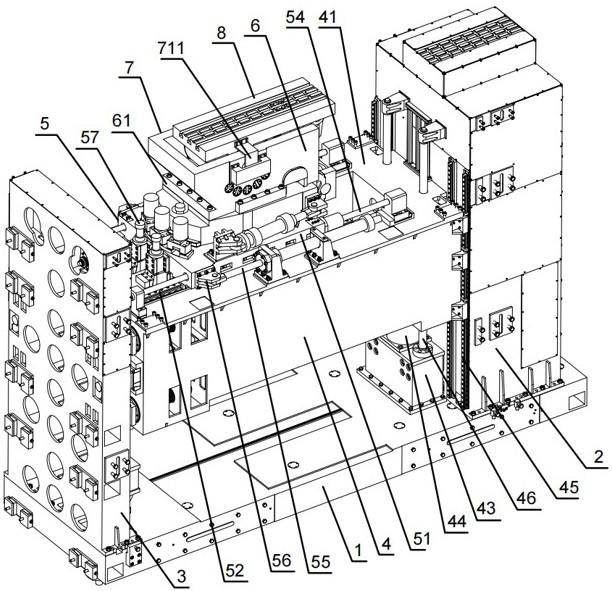
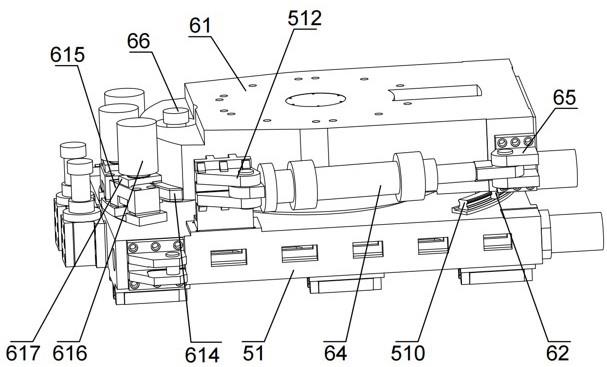
13.图1为本发明提供的高超声速高温风洞模型送进系统的结构示意图;图2为偏航机构另一侧的结构示意图;图3为偏航机构的剖面结构示意图;图4为图3中a处的放大示意图。
14.各部件名称对应附图标记如下:滑座51,圆弧导轨510,旋转旋心511,偏航连接座512,偏航旋转体61,偏航导轨滑块62,偏航驱动油缸64,旋转连接座65,偏航导向夹紧条614,u型安装座615,偏航液压锁紧油缸616,偏航夹紧片617,偏航电动缸66,偏航定位销67,偏航定位孔513,轴承支撑体68,编码器支架69,偏航检测编码器610,检测轴612,检测轴支架613,油缸安装座72。
具体实施方式
15.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
16.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个元件或其组合的存在或添加。如图1-4所示:本发明的一种大型高超声速高温风洞模型送进系统的偏航机构,包括:滑座51,其上表面安装有圆弧导轨510,所述滑座51上表面的中部还设置有旋转旋心511,所述滑座51的上表面还安装有偏航连接座512;偏航旋转体61,其下表面安装有偏航导轨滑块62,所述偏航导轨滑块62滑动设置在所述圆弧导轨510上,所述偏航旋转体61通过交叉滚子轴承与旋转旋心511转动连接;偏航驱动油缸64,其缸体端部与所述偏航连接座512转动连接,所述偏航驱动油缸64的活塞杆与偏航旋转体61的旋转连接座65转动连接。
17.工作原理:本发明提供的大型高超声速高温风洞模型送进系统的偏航机构,采用将直线运动转化为角度变化的形式,偏航驱动油缸64活塞杆的伸缩运动,驱动偏航旋转体61以旋转旋心511为圆心,沿着圆弧导轨510做圆弧运动,从而实现改变攻角俯仰机构和模型偏航角的目的,在这个过程中,由于偏航驱动油缸64的活塞杆和缸体分别与旋转连接座65和偏航连接座512转动连接,偏航驱动油缸64绕着偏航连接座512发生相应的转动。
18.在上述技术方案中,所述偏航旋转体61的后端设置有呈弧形结构的偏航导向夹紧条614,所述滑座51上的凸台上通过u型安装座615安装有三个成弧形排布的偏航液压锁紧油缸616,所述偏航液压锁紧油缸616的两个偏航夹紧片617分别与所述偏航导向夹紧条614相抵接。
19.当偏航旋转体61到达预定位置后采用偏航液压锁紧油缸616驱动两个偏航夹紧片617夹紧偏航导向夹紧条614,实现偏航旋转体61任意位置的锁紧。
20.在上述技术方案中,所述偏航旋转体的后端还安装有偏航电动缸66,所述偏航电动缸66的伸缩杆固定连接有偏航定位销67,所述滑座51上设置有与偏航定位销67相适配的偏航定位孔513。
21.通过偏航电动缸66推动偏航定位销67插入至偏航定位孔513中,用以实现偏航旋转体61的零位定位。
22.在上述技术方案中,所述偏航机构内还设置有偏航检测机构,所述偏航检测机构包括:轴承支撑体68,其固定安装在所述滑座51上;编码器支架69,其固定安装在所述轴承支撑体68的内部,所述编码器支架69内安装有偏航检测编码器610,所述偏航检测编码器610通过联轴器ⅰ连接有检测轴612,所述检测轴612通过轴承与所述编码器支架69转动连接;所述偏航旋转体61内固定连接有检测轴支架613,所述检测轴612通过胀套固定在检测轴支架613内。
23.在偏航旋转体61绕着旋转旋心511转动时,偏航旋转体61带动检测轴612旋转,轴承支撑体68、偏航检测编码器610为固定件,在检测轴612旋转时轴承支撑体68和偏航检测编码器610保持不动,通过偏航检测编码器610检测偏航旋转体61的偏航角度,即得到模型的偏航角度。
24.在上述技术方案中,所述偏航导向夹紧条614的弧度与圆弧导轨510相同,这样的设置方式,偏航导向夹紧条614不仅提供了夹紧附着的机构,也具有一定的运动限位作用,更好与三个偏航液压锁紧油缸进行配合。
25.在上述技术方案中,所述偏航旋转体61的前端安装有用于安装俯仰驱动油缸的油缸安装座72。
26.这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
27.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。