1.本发明属于风洞试验设备和模型动态、静态支撑技术领域,更具体地说,本发明涉及一种大型高超声速高温风洞模型送进系统。
背景技术:
2.在进行相关风洞试验时,需要有模型送进系统将模型从试验段的吊舱内快速垂直运送到预定的流场区域位置并锁紧,在实验完成后再将模型快速退出流场,最终模型停止在试验段吊舱内。模型坐标系定义如下:坐标系原点o位于喷管出口截面与扩压器入口截面轴线的中点,设备流场轴向为x方向(指向扩压器),竖直向上方向为y方向,在xy轴平面上模型轴线与流场轴线的夹角为俯仰角α,在xz轴平面上模型轴线与流场轴线的夹角为偏航角β。模型气动载荷参数定义依据航空类和航天类国家标准gb/t 16638-2008坐标轴系的规定。
3.其中模型的各自由度运动速度需要可程控设定并连续可调,攻角α和偏航角β可联动。系统运行过程中,包括运动和静止工作状态,平稳无振荡。另外根据试验环境条件对机构本体、驱动系统及线缆等采取必要的防热措施,试验时处于隔板上方的机构需做水冷防热设计。
4.按照上述主要技术指标要求,整个模型送进系统需具备空间4个自由度的运动功能,即沿x轴的轴向平移、沿y轴的法向升降、绕z轴的俯仰旋转和绕y轴的偏航旋转。目前,缺少能够实现上述功能的风洞模型送进系统。
技术实现要素:
5.本发明的一个目的是解决上述问题和/或缺陷,并提供后面将说明的优点。
6.为了实现根据本发明的这些目的和优点,提供了一种大型高超声速高温风洞模型送进系统,包括:支撑底座,其上两端分别设置有大立柱和小立柱,所述大立柱和小立柱之间滑动设置有y向举升机构;轴向x平移机构,其设置在所述y向举升机构的上端,所述轴向x平移机构在水平轴向方向上与y向举升机构为滑动连接;偏航机构,其滑动设置在所述轴向x平移机构的滑座上;俯仰攻角机构,其安装在所述偏航机构的偏航旋转体上,所述俯仰攻角机构上安装有用于承载模型的模型支撑平台。
7.优选的是,其中,所述y向举升机构的结构包括:所述大立柱和小立柱的内侧分别安装有多条竖直直线导轨;分体式y向举升框架,其两侧分别安装有多个y向直线导轨滑块,所述y向直线导轨滑块滑动设置在竖直直线导轨上;两个y向支撑座,其分别安装在所述支撑底座的两端且靠近大立柱和小立柱的内
侧,所述y向支撑座上分别安装有y向升降油缸,且两个y向升降油缸为并联连接;所述y向升降油缸的活塞杆上端与分体式y向举升框架的外侧固定相接;所述y向举升机构还设置有竖直y向检测元件,所述y向检测元件的y向磁栅尺安装在大立柱和小立柱上,所述y向举升框架上安装有y向磁栅尺读数头支架,所述y向磁栅尺读数头支架安装有y向磁栅尺读数头。
8.优选的是,其中,所述y向支撑座上安装有两根导向柱,且两根导向柱分居y向升降油缸的两侧,所述导向柱的上端分别与大立柱和小立柱固定连接;所述分体式y向举升框架的两端分别与导向柱滑动连接,所述y向举升框架两端分别安装有锁紧油缸,所述导向柱穿设在锁紧油缸中;所述大立柱和小立柱上分别对称安装有y向电动缸,所述y向电动缸的伸缩杆固定连接有y向定位销,所述分体式y向举升框架的两侧分别设置有与y向定位销对应的y向插销孔。
9.优选的是,其中,所述轴向x平移机构的结构包括:两条水平直线导轨,其安装在所述y向举升机构的上表面;滑座,其下表面安装有x向导轨滑块,所述x向导轨滑块与水平直线导轨滑动连接;所述y向举升机构的上表面安装有两根水平导向杆,所述滑座的两端滑动穿设在水平导向杆上;两个x向驱动油缸,其通过安装架安装在所述y向举升机构的上表面,且两个x向驱动油缸分别位于两条水平直线导轨的外侧,所述滑座的两个侧面分别安装有x向连接座,所述x向驱动油缸的活塞杆与x向连接座转动连接;所述滑座的前端安装有两个水平锁紧油缸,所述水平导向杆穿设在水平锁紧油缸中;所述滑座的后端安装有多个x向电动缸,所述x向电动缸的伸缩杆固定连接有x向插销,所述y向举升机构上开设有与x向插销相对应的x向定位孔;所述轴向x平移机构还设置有水平x向检测元件,所述水平x向检测元件的x向磁栅尺安装在y向举升机构的y向举升框架上,所述滑座上安装有x向磁栅尺读数头支架,所述x向磁栅尺读数头支架安装有x向磁栅尺读数头。
10.优选的是,其中,所述偏航机构的结构包括:圆弧导轨,其安装在所述滑座的上表面,所述滑座上表面的中部还设置有旋转旋心,所述滑座的上表面还安装有偏航连接座;偏航旋转体,其下表面安装有偏航导轨滑块,所述偏航导轨滑块滑动设置在所述圆弧导轨上,所述偏航旋转体通过交叉滚子轴承与旋转旋心转动连接;偏航驱动油缸,其缸体端部与所述偏航连接座转动连接,所述偏航驱动油缸的活塞杆与偏航旋转体的旋转连接座转动连接;所述偏航旋转体的后端设置有呈弧形结构的偏航导向夹紧条,所述滑座上的凸台上通过u型安装座安装有多个成弧形排布的偏航液压锁紧油缸,所述偏航液压锁紧油缸的两个偏航夹紧片分别与所述偏航导向夹紧条相抵接;所述偏航旋转体的后端还安装有偏航电动缸,所述偏航电动缸的伸缩杆固定连接有偏航定位销,所述滑座上设置有与偏航定位销相适配的偏航定位孔。
11.优选的是,其中,所述偏航机构内还设置有偏航检测机构,所述偏航检测机构包括:轴承支撑体,其固定安装在所述滑座上;编码器支架,其固定安装在所述轴承支撑体的内部,所述编码器支架内安装有偏航检测编码器,所述偏航检测编码器通过联轴器ⅰ连接有检测轴,所述检测轴通过轴承与所述编码器支架转动连接;所述偏航旋转体内固定连接有检测轴支架,所述检测轴通过胀套固定在检测轴支架内。
12.优选的是,其中,所述俯仰攻角机构的结构包括:所述偏航旋转体的上固定安装有俯仰支架,所述偏航旋转体前端固定安装有油缸安装座,所述模型支撑平台通过俯仰支撑轴和支撑轴承与俯仰支架转动连接,所述油缸安装座上转动安装有俯仰驱动油缸;夹紧定位条,其为内侧设置有齿条的弯刀状结构,所述夹紧定位条的上端与模型支撑平台固定连接,下端活动设置在俯仰支架的槽体中;所述俯仰支架上安装有夹紧油缸,所述夹紧油缸的两个夹紧片分别位于夹紧定位条的两侧;所述俯仰支架内部还安装有电动缸,所述电动缸的伸缩杆上固定连接有定位块,所述定位块上设置有用于啮合固定夹紧定位条的齿条,所述定位块的上端和下端分别滑动连接有导向块。
13.优选的是,其中,所述俯仰攻角机构上设置有俯仰检测机构,所述俯仰检测机构包括:连接板,其上端安装在所述模型支撑平台的侧面,所述连接板的下端与俯仰支撑轴转动连接;俯仰检测编码器,其安装在所述俯仰支撑轴内部,所述俯仰检测编码器通过联轴器ⅱ与连接板连接。
14.优选的是,其中,所述y向举升机构上还设置有热防风组件,所述热防风组件的结构包括:两块防风导向板,其通过支架安装在所述y向举升机构的上方,且两块防风导向板分居偏航机构、俯仰攻角机构的两侧;所述防风导向板在水平x方向上滑动连接有多层防风冷却隔热板,每层防风冷却隔热板之间设置有推拉结构。
15.优选的是,其中,所述大立柱和小立柱两侧之间连接有工字型梁和连接梁,且所述连接梁位于工字型梁的上方;两根小立柱之间通过前连接体连接固定,两根大立柱之间通过后连接体连接固定;所述支撑底座的下表面、大立柱的外侧和小立柱的外侧均设置有外围支撑机构,所述外围支撑机构包括多根支撑杆组件,所述支撑杆组件包括支撑连接座,其一端与大立柱、小立柱或支撑底座相接,另一端连接有支撑杆,支撑杆之间连接有连接杆。
16.本发明至少包括以下有益效果:本发明公开的一种大型高超声速高温风洞模型送进系统,通过设置的y向举升机构、轴向x平移机构、偏航机构、俯仰攻角机构,并将y向举升机构、轴向x平移机构、偏航机构、俯仰攻角机构设置为串联式运动布局安装,这种设置结构
具有较大的作业空间和很高的灵活性,还具有支撑载荷大、平稳性好、对测量和控制信号无干扰、可靠性好的优点;本发明提供的送进系统不仅实现了模型在大尺度高超声速风洞的送进、姿态调整、四个自由度的精确定位功能,并且y向(竖直方向)、x向(轴向水平方向)、偏航角调节和俯仰角调节之间的运动相互独立,不会产生耦合影响,同时通过相关的锁紧机构能够将模型在任意位置锁紧,实现对模型的稳定支撑。
17.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
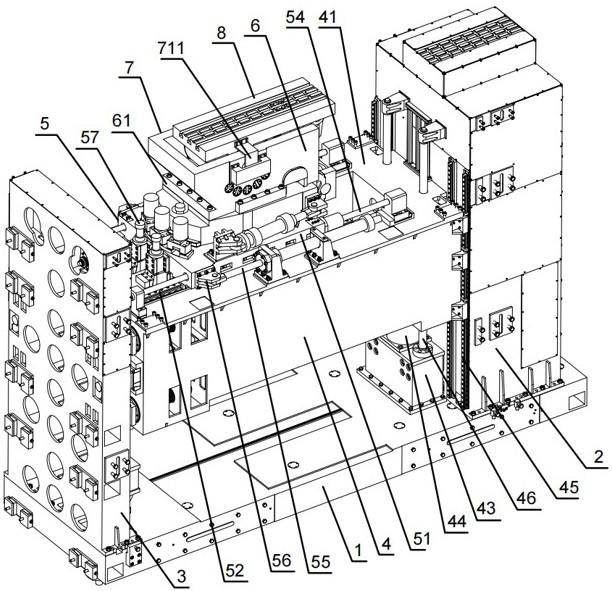
18.图1为本发明提供的大型高超声速高温风洞模型送进系统的结构示意图;图2为大型高超声速高温风洞模型送进系统的横剖面结构示意图;图3为大型高超声速高温风洞模型送进系统的纵(轴向)剖面结构示意图;图4为y向举升机构及其上轴向x平移机构的结构示意图;图5为轴向x平移机构及其上偏航机构的结构示意图;图6为偏航机构及其上俯仰攻角机构的结构示意图;图7为偏航机构、俯仰攻角机构的横剖面结构示意图;图8为偏航机构、俯仰攻角机构的纵剖面结构示意图;图9为图7中a处放大示意图;图10为图8中b处放大示意图;图11为送进系统安装热防风组件、工字型梁、连接梁和外围支撑机构后的结构示意图;图12为小立柱上安装的y向电动缸的局部剖面结构示意图。
具体实施方式
19.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
20.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个元件或其组合的存在或添加。如图1-图12所示:本发明的一种大型高超声速高温风洞模型送进系统,包括:支撑底座1,其上两端分别设置有大立柱2和小立柱3,所述大立柱2和小立柱3之间滑动设置有y向举升机构4;轴向x平移机构5,其设置在所述y向举升机构4的上端,所述轴向x平移机构5在水平轴向方向上与y向举升机构4为滑动连接;偏航机构6,其滑动设置在所述轴向x平移机构5的滑座51上;俯仰攻角机构7,其安装在所述偏航机构6的偏航旋转体61上,所述俯仰攻角机构7上安装有用于承载模型的模型支撑平台8。
21.工作原理:本发明公开的一种大型高超声速高温风洞模型送进系统,通过在支撑底座1的上方设置y向举升机构4,在y向举升机构4上设置轴向x平移机构5,在轴向x平移机构5上设置偏航机构6,在偏航机构6上设置俯仰攻角机构7,实现了y向举升机构4
→
轴向x平
移机构5
→
偏航机构6
→
俯仰攻角机构7的串联式运动连接布局,然后在俯仰攻角机构7上安装模型支撑平台8,用以支撑模型,实现模型y向(竖直方向)、x向(轴向水平方向)、偏航β角和俯仰α角四个自由度的姿态调整和定位支撑功能;通过y向举升机构4将其上的轴向x平移机构5、偏航机构6、俯仰攻角机构7和模型举升或下降一定位置,用以实现将模型从试验段的吊舱内快速垂直运送到预定的流场区域位置并锁紧,试验完成后再将模型快速退出流场区域,最终模型停止在试验段吊舱内;通过轴向x平移机构5调节偏航机构6、俯仰攻角机构7和模型的轴向水平位置,并且轴向x平移机构5的滑座51是偏航机构6、俯仰攻角机构7的载体;通过偏航机构6调节俯仰攻角机构7和模型的偏航β角;通过俯仰攻角机构7调节模型的俯仰α角。相应的动力锁紧机构在模型姿态调节过程中实现锁紧定位功能。支撑底座1采用优质金属结构件,为矩形框架结构,支撑底座1内部布置加强筋,加工时进行时效处理。为便于装配采用两段拼接,两端支撑底座1通过螺栓把合。支撑底座1通过调整垫铁与地基的支撑杆连接,通过调整垫铁调整支撑底座1的水平。支撑底座1上面加工出大立柱2、小立柱3与y向举升机构4支撑连接用的平面,作为安装的基准。大立柱2、小立柱3通过螺栓安装在支撑底座1上。本发明具有较大的作业空间和很高的灵活性,还具有支撑载荷大、平稳性好、对测量和控制信号无干扰、可靠性好的优点;本发明提供的送进系统不仅实现了模型在大尺度高超声速风洞的送进、姿态调整、四个自由度的精确定位功能,并且y向(竖直方向)、x向(轴向水平方向)、偏航角调节和俯仰角调节之间的运动相互独立,不会产生耦合影响,同时通过相关的锁紧机构能够将模型在任意位置锁紧,实现对模型的稳定支撑。
22.根据支撑模型的需要,模型支撑平台8还可以被配置为模型前支撑平台和模型后支撑平台,其中模型前支撑平台安装在俯仰攻角机构上,模型前支撑平台用于送进模式下模型姿态的调整;模型后支撑品平安装在大立柱上,用于辅助支撑大模型。
23.在上述技术方案中,所述y向举升机构4的结构包括:每根大立柱2和每根小立柱3的内侧分别安装有2条竖直直线导轨45,则在竖直方向上共安装有8条竖直直线导轨45;分体式y向举升框架41,其两侧分别安装有12个y向直线导轨滑块42,每条竖直直线导轨45对应连接有3个y向直线导轨滑块42,所述y向直线导轨滑块42滑动设置在竖直直线导轨45上;两个y向支撑座43,其分别安装在所述支撑底座1的两端且靠近大立柱2和小立柱3的内侧,所述y向支撑座43上分别安装有y向升降油缸44,且两个y向升降油缸44为并联连接,支撑底座1上开有避让y向升降油缸44的光孔;所述y向升降油缸44的活塞杆上端与分体式y向举升框架41的外侧固定相接;所述y向举升机构4还设置有竖直y向检测元件,所述y向检测元件的y向磁栅尺安装在大立柱2和小立柱3上,所述分体式y向举升框架41上安装有y向磁栅尺读数头支架,所述y向磁栅尺读数头支架安装有y向磁栅尺读数头。
24.每根竖直直线导轨45对应三个y向直线导轨滑块42,用于提高分体式y向举升框架41的刚度与精度,y向直线导轨滑块42采用免润滑形式,竖直直线导轨45选用规格为100的滚珠直线导轨。分体式y向举升框架41作为整个送进系统的主体,其核心作用是实现四个自由度稳定运行的基础,要求具备高刚度、高稳定性和模态。分体式y向举升框架41采用优质金属结构件,内部布置加强筋,加工时进行了时效处理。通过两个并联的y向升降油缸44同
步驱动分体式y向举升框架41上升或下降,用以实现y向举升框架41以及其上的轴向x平移机构5、偏航机构6、俯仰攻角机构7和模型的上升或下降。竖直y向检测元件用于检测分体式y向举升框架41的y向实际位置,分体式y向举升框架41在y向移动时,带动y向磁栅尺读数头在y向磁栅尺上移动,从而测量出分体式y向举升框架41的y向实际位置。在模型不送进模式下,y向举升机构4主要用于模型在流场中的y向位置升降。由于y向举升机构4驱动质量很大,且由于轴向x平移机构5位置的不同,驱动负载的重心也会变化,这种大质量负载的偏载和重心变化,对向y向举升机构4的驱动造成很大困难。因此必须对y方向采取必要的措施以保证升降运动的平稳顺利驱动。采用两个y向升降液压缸44并联驱动,y向举升机构4负载由支撑座1支撑,采用高刚度滚珠导轨导向的驱动方式,即利用竖直直线导轨45及y向直线导轨滑块42为导向装置,两个y向升降液压缸44为驱动装置,利用计算机同步控制,进行重心驱动,到达预定位置由锁紧机构进行可靠锁紧。
25.在上述技术方案中,所述y向支撑座43上安装有两根导向柱46,且两根导向柱46分居y向升降油缸44的两侧,所述导向柱46的上端分别与大立柱2和小立柱3固定连接;所述分体式y向举升框架41的两端分别与导向柱46滑动连接,所述分体式y向举升框架41两端分别安装有锁紧油缸47,所述导向柱46穿设在锁紧油缸47中;所述大立柱2和小立柱3上分别对称安装有y向电动缸48,所述y向电动缸48的伸缩杆固定连接有y向定位销49,所述分体式y向举升框架41的两侧分别设置有与y向定位销49对应的y向插销孔410。
26.分体式y向举升框架41的定位锁紧主要靠y向定位销,y向电动缸48将y向定位销49推入y向插销孔410中,用以将分体式y向举升框架41锁紧在y向零位位置,核心方案是将剪切转为挤压竖向承载,承载可靠,避免以往的剪切受力;任意位置锁紧依靠导向柱46上的四个锁紧油缸47进行弹簧机械锁紧。
27.在上述技术方案中,所述轴向x平移机构5的结构包括:两条水平直线导轨52,其安装在所述y向举升机构4的上表面;滑座51,其下表面安装有x向导轨滑块53,所述x向导轨滑块53与水平直线导轨52滑动连接;所述y向举升机构4的上表面安装有两根水平导向杆54,所述滑座51的两端滑动穿设在水平导向杆54上;两个x向驱动油缸55,其通过安装架安装在所述y向举升机构4的上表面,且两个x向驱动油缸55分别位于两条水平直线导轨52的外侧,所述滑座51的两个侧面分别安装有x向连接座56,所述x向驱动油缸55的活塞杆与x向连接座56转动连接;所述滑座51的前端安装有两个水平锁紧油缸514,所述水平导向杆54穿设在水平锁紧油缸514中;所述滑座51的后端安装有两个x向电动缸57,所述x向电动缸57的伸缩杆固定连接有x向插销,所述y向举升机构4上开设有与x向插销相对应的x向定位孔;所述轴向x平移机构5还设置有水平x向检测元件,所述水平x向检测元件的x向磁栅尺安装在y向举升机构4的分体式y向举升框架41上,所述滑座51上安装有x向磁栅尺读数头支架,所述x向磁栅尺读数头支架安装有x向磁栅尺读数头。
28.轴向x平移机构5中的滑座51为优质钢铸件,加工时采用时效处理消除内应力。滑座51在两个x向驱动油缸55的驱动下沿水平直线导轨52水平移动,实现改变安装在其上偏
航机构6、俯仰攻角机构7和模型水平位置的目的。滑座51不仅是轴向x平移机构5的重要构件,同时还是偏航机构6、俯仰攻角机构7的载体。滑座51水平移动带动x向磁栅尺读数头在x向磁栅尺上移动,测量出轴向x平移机构在x向(水平方向)的实际位置。通过x向电动缸推动x向插销插入x向定位孔中,用以实现对滑座51的定位锁紧。水平锁紧油缸514用于对滑座51在轴向x水平任意位置的锁紧。
29.在上述技术方案中,所述偏航机构6的结构包括:圆弧导轨510,其安装在所述滑座51的上表面,所述滑座51上表面的中部还设置有旋转旋心511,所述滑座51的上表面还安装有偏航连接座512;偏航旋转体61,其下表面安装有四个偏航导轨滑块62,所述偏航导轨滑块62滑动设置在所述圆弧导轨510上,所述偏航旋转体61通过交叉滚子轴承与旋转旋心511转动连接;偏航驱动油缸64,其缸体端部与所述偏航连接座512转动连接,所述偏航驱动油缸64的活塞杆与偏航旋转体61的旋转连接座65转动连接;所述偏航旋转体61的后端设置有呈弧形结构的偏航导向夹紧条614,所述滑座51上的凸台上通过u型安装座615安装有三个成弧形排布的偏航液压锁紧油缸616,所述偏航液压锁紧油缸616的两个偏航夹紧片617分别与所述偏航导向夹紧条614相抵接;所述偏航旋转体的后端还安装有偏航电动缸66,所述偏航电动缸66的伸缩杆固定连接有偏航定位销67,所述滑座51上设置有与偏航定位销67相适配的偏航定位孔513。
30.偏航机构6是用来改变模型偏航角β的机构,偏航机构6采用将直线运动转化为角度变化的形式,如图6所示,偏航驱动油缸64活塞杆的伸缩运动,驱动偏航旋转体61以旋转旋心511为圆心,沿着圆弧导轨510做圆弧运动,从而实现改变攻角俯仰机构7和模型偏航角的目的,在这个过程中,偏航驱动油缸64绕着偏航连接座512发生相应的转动,当偏航旋转体61到达预定位置后采用偏航液压锁紧油缸616驱动两个偏航夹紧片617夹紧偏航导向夹紧条614,实现偏航旋转体61任意位置的锁紧。通过偏航电动缸66推动偏航定位销67插入至偏航定位孔513中,用以实现偏航旋转体61的零位定位。
31.在上述技术方案中,所述偏航机构6内还设置有偏航检测机构,所述偏航检测机构包括:轴承支撑体68,其固定安装在所述滑座51上;编码器支架69,其固定安装在所述轴承支撑体68的内部,所述编码器支架69内安装有偏航检测编码器610,所述偏航检测编码器610通过联轴器ⅰ连接有检测轴612,所述检测轴612通过轴承与所述编码器支架69转动连接;所述偏航旋转体61内固定连接有检测轴支架613,所述检测轴612通过胀套固定在检测轴支架613内。
32.在偏航旋转体61绕着旋转旋心511转动时,偏航旋转体61带动检测轴612旋转,轴承支撑体68、偏航检测编码器610为固定件,在检测轴612旋转时轴承支撑体68和偏航检测编码器610保持不动,通过偏航检测编码器610检测偏航旋转体61的偏航角度,即得到模型的偏航角度。
33.在上述技术方案中,所述俯仰攻角机构7的结构包括:所述偏航旋转体61的上固定安装有俯仰支架71,所述偏航旋转体61前端固定安装
有油缸安装座72,所述模型支撑平台8通过俯仰支撑轴73和支撑轴承与俯仰支架71转动连接,所述油缸安装座72上转动安装有俯仰驱动油缸721;夹紧定位条74,其为内侧设置有齿条的弯刀状结构,所述夹紧定位条74的上端与模型支撑平台8固定连接,下端活动设置在俯仰支架71的槽体75中;所述俯仰支架71上安装有夹紧油缸76,所述夹紧油缸76的两个夹紧片77分别位于夹紧定位条74的两侧;所述俯仰支架71内部还安装有电动缸78,所述电动缸78的伸缩杆上固定连接有定位块79,所述定位块79上设置有用于啮合连接夹紧定位条74的齿条,所述定位块79的上端和下端分别滑动连接有导向块710。
34.俯仰支架71采用优质钢铸钢件,模型支撑平台8采用优质锻件,俯仰支撑轴73上安装有圆柱滚子轴承和圆锥滚子轴承,用以支撑模型支撑平台8的转动,模型支撑平台8在俯仰驱动油缸721的驱动下绕俯仰支撑轴73转动,通过电动缸78推动定位块79和夹紧定位条74啮合,对模型支撑平台8的俯仰角进行锁紧,电动缸78控制定位块79的推出缩回从而实现定位块79与夹紧定位条74的啮合和脱离,同时结合夹紧油缸76的设置,通过两个夹紧片77进一步实现对夹紧定位条74的定位锁紧,并且这种结构设置能够承受3倍气动载荷。
35.在上述技术方案中,所述俯仰攻角机构7上设置有俯仰检测机构,所述俯仰检测机构包括:连接板711,其上端安装在所述模型支撑平台8的侧面,所述连接板711的下端与俯仰支撑轴73转动连接;俯仰检测编码器712,其安装在所述俯仰支撑轴73内部,所述俯仰检测编码器712通过联轴器ⅱ713与连接板711连接。
36.模型支撑平台8做俯仰运动时带动连接板711以俯仰支撑轴73为中心旋转,俯仰检测编码器712为固定件,在模型支撑平台8和连接板711转动过程中俯仰检测编码器712保持不动,通过俯仰编码器712检测模型支撑平台8的俯仰角度。
37.在上述技术方案中,所述y向举升机构4上还设置有热防风组件,所述热防风组件的结构包括:两块防风导向板9,其通过支架安装10在所述y向举升机构4的上方,且两块防风导向板9分居偏航机构6、俯仰攻角机构7的两侧;所述防风导向板9在水平x方向上滑动连接有多层防风冷却隔热板11,每层防风冷却隔热板11之间设置有推拉结构。
38.模型送进系统上方虽然位于试验段内部平台上的开合门,但在试验过程中,通过模型辐射的热量不能完全被开合门阻挡,存在辐射加热的可能,因此设计热防风组件有助于阻挡辐射至模型送进系统上的热量,避免液压管路、电器元件受到破坏,确保模型送进系统的可靠运行。通过方凳冷却隔热板挡住偏航旋转体以下部分,热防风组件有两个自由度,水平x方向自由度与偏航自由度。每层防风冷却隔热板11之间设置推拉结构,便于防风冷却隔热板沿防风导向板做x方向的轴向移动。
39.在上述技术方案中,所述大立柱2和小立柱2两侧之间连接有工字型梁13和连接梁(未示出),且所述连接梁位于工字型梁13的上方;两根小立柱3之间通过前连接体连接固定,两根大立柱2之间通过后连接体连接固定;所述支撑底座1的下表面、大立柱2的外侧和小立柱3的外侧均设置有外围支撑机
构,所述外围支撑机构包括多根支撑杆组件,所述支撑杆组件包括支撑连接座17,其一端与大立柱2、小立柱3或支撑底座1相接,另一端连接有支撑杆18,支撑杆18之间连接有连接杆19。
40.工字型梁13和连接梁实现了大立柱2和小立柱3的连接固定,增加了送进系统的支撑稳定性;模型送进系统安装在试验段下驻室内,由于试验段与模型送进系统采用相互独立的混凝土地基基础,模型送进系统与试验段下驻室通过连接支撑杆和波纹管与下驻室分离,既能保证试验段的真空环境,同时能够起到模型送进系统承载传递至混凝土基础,并使得模型送进系统与试验段驻室没有硬性连接。采用的方案为ф500
×
50mm。外围支撑由送进系统双侧和支撑杆18组件组成,主要功能是将送进系统与外围基础固连为一体。外围支撑的机械结构如图11所示,连接方式有:外围支撑杆组件与试验段外部独立混凝土基础预埋件,螺接 焊接;外围支撑杆组件与送进系统支撑骨架,调整垫铁 螺接 焊接。
41.这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
42.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。