1.本实用新型涉及建筑施工领域,具体涉及一种多机械臂废弃建筑破拆机器人。
背景技术:
2.随着建国初期建筑进入超期服役期,城市中许多老旧建筑达到使用寿命,需要被拆除。目前废弃建筑物的拆除有多重方式,有爆破拆除、建筑机械拆除。一般采用人工驾驶啄木鸟式挖机对旧有建筑物进行拆除时,由于老旧建筑楼体自身情况复杂不稳定、加上钢混凝结构复杂,导致拆除效率低下,且存在楼板塌落、飞石等危险。同时,拆除后废弃混凝土,受损较大,形状大小不一,不利于回收再利用,市场上的挖机都为单臂,功能单一。
技术实现要素:
3.为了解决上述的技术问题,本实用新型的目的在于提供了一种多机械臂废弃建筑破拆机器人,多个功能的机械臂集合为一体,功能众多,效率高;可实现自动化破坏拆除废弃房屋,使用较少的人力,结构简单,成本低。
4.为进一步实现上述目的,本实用新型采用以下技术方案:一种多机械臂废弃建筑破拆机器人,包括:
5.底盘部分,用于支撑和稳定整个装置并带动整个装置运动;
6.水平平台部分,设置于所述底盘部分上端,用于安装机械臂部分和液压夯击锤;
7.所述机械臂部分包括安装在所述水平平台部分上的挖机臂、抓手臂、钻头臂、切割臂和铲臂。
8.可选的,所述底盘部分包括主体箱、设置于所述主体箱上端的封箱板以及位于主体箱两侧的圆凸轮、光滑圆轮和履带,所述封箱板上端设置有回转轴承齿轮,用于与水平平台连接;
9.所述主体箱前端连接有两根倾斜杆,一根长连杆穿过连杆板的上端和倾斜杆后与位于主体箱两侧的一组光滑圆轮连接,一根长连杆穿过连杆板的下端和主体箱前下端后与一组光滑圆轮连接;
10.两根齿轮杆连接在所述主体箱的侧端并搭在履带上,一根长连杆通过所述主体箱的后下端与位于主体箱两侧的一组光滑圆轮连接;
11.电机则设置于所述主体箱的后上端并与圆凸轮连接,在三组光滑圆轮、一组圆凸轮和一组齿轮杆外周设置有履带。
12.可选的,所述水平平台部分包括水平平台以及设置于所述水平平台上的四组旋转圆台、铁链架和支撑架,所述旋转圆台分别用于安装挖机臂、抓手臂、切割臂和钻头臂,所述支撑架固定在水平平台前端,用于固定液压夯击锤的主体部分,所述液压夯击锤最上端具有的圆形通孔通过铁链和铁链架连接。
13.与现有技术相比,本实用新型的有益效果如下:1.多个功能的机械臂集合为一体,功能众多,效率高。2、可实现自动化破坏拆除废弃房屋,使用较少的人力,且结构简单,成本
低。3、增加液压夯击锤破碎均匀建筑废石,利于石块回收,节省资源。4、多个机械臂前端可旋转,适合多角度,多方位工作,方便快捷。5、爬坡履带底盘,不受地形因素影响,实用性强。
附图说明
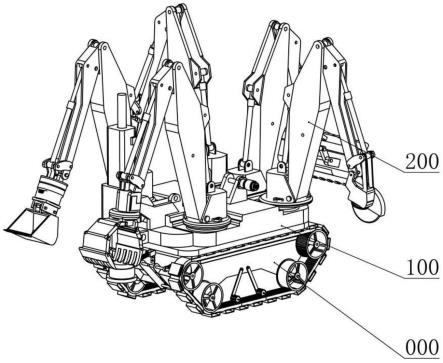
14.图1为本实用新型立体示意图;
15.图2为本实用新型底盘部分结构示意图;
16.图3为本实用新型底盘部分电机安装示意图;
17.图4为本实用新型水平平台部分结构示意图;
18.图5为本实用新型挖机臂结构示意图;
19.图6为本实用新型抓手臂结构示意图;
20.图7为本实用新型钻头臂结构示意图;
21.图8为本实用新型切割臂结构示意图;
22.图9为本实用新型铲臂结构示意图;
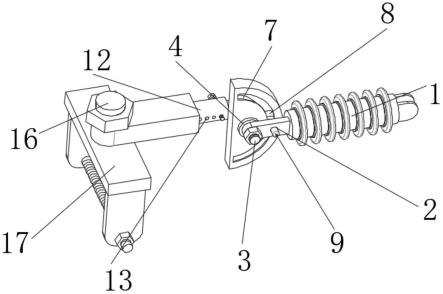
23.图10为本实用新型夯击锤细节图;
24.图11为本实用新型控制框图。
25.000-底盘部分:
26.001-倾斜杆,002-封箱板,003-主体箱,004-圆凸轮,005-光滑圆轮,006-履带,007-齿轮杆,008-连杆板,009-长连杆,010-电机;
27.100-水平平台部分:
28.101-旋转圆台,102-铁链架,103-支撑架,104-水平平台;
29.200-机械臂部分:
30.210-挖机臂;211-挖斗,212-液压旋转缸,213-机械臂;
31.220-抓手臂;221-抓手,213-机械臂;
32.230-钻头臂;231-钻头,213-机械臂;
33.240-切割臂;241-切割机,213-机械臂;
34.250-铲臂;251-铲斗,213-机械臂;
35.260-液压夯击锤。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.本实用新型提供的多机械臂废弃建筑破拆机器人,由图1所示,包括底盘部分000、设置于底盘部分000上端的水平平台部分100和设置于水平平台部分100上端的机械臂部分200。
38.由图2、图3所示,底盘部分000由倾斜杆001、封箱板002、主体箱003、圆凸轮004、光滑圆轮005、履带006、齿轮杆007、连杆板008、长连杆009和电机010组成,封箱板002上端设置有回转轴承齿轮,用于与水平平台104连接,实现底盘与机身的固定。由图2所示,倾斜杆
001先通过螺栓螺母与主体箱003的前端上部连接,共有两根倾斜杆001,在两根倾斜杆001的作用下,使得履带006竖直方向倾斜并可以均匀受力;连杆板008连接在主体箱003的两块前端板的中间;位于主体箱003前部的两根长连杆009上下间隔布设,且分别从连杆板008的上下两个孔之间穿过,其中,位于上部的这一根长连杆009穿过连杆板008的上端后,与一组光滑圆轮005连接,同时,位于上部的这一根长连杆009与两根倾斜杆001连接;位于下部的另一根长连杆009先穿过连杆板008的下端,再通过主体箱003前下端处的孔洞,最后与一组光滑圆轮005连接;通过间隔布设的两根长连杆009与连杆板008的连接,装置稳定性得到了提升。两根齿轮杆007连接在主体箱003的侧端并搭在履带006上,主要使碰地端的履带能够平整运行。由图3所示,位于主体箱003后部的一根长连杆009通过主体箱003的后下端与一组光滑圆轮005连接;电机010则通过主体箱003的后上端与圆凸轮004连接,为底盘运动提供直接动力,两组电机010可以单独控制正反转,实现底盘履带的差速转动;履带006则通过三组光滑圆轮005、一组圆凸轮004和一组齿轮杆007固定安装。由电机010带动圆凸轮004运动,再由圆凸轮004上的凸轮与履带006内部的凸轮相互啮合带动底盘运动。
39.由图4所示,水平平台部分100由四组旋转圆台101、铁链架102、支撑架103和水平平台104组成,水平平台104内部设置有动力系统和控制系统,动力系统主要为液压旋转缸,为旋转圆台101提供动力,通过液压控制旋转圆台101旋转,控制系统主要由plc编程控制器进行控制,外部的遥控设备输入不同的信号时,plc编程控制器对指令信号进行编码,载波,调制,以及信号放大,解调,译码后送给输出电路,各个构件的电机收到指令信号后分别驱动相应的油缸或传动机构,使各工作部件进行工作。plc编程控制器可以实现对各个机械臂的控制,使其能够完成预先设计好的的动作。通过plc编程控制器对各个功能模块电路的工作,最后利用组态王6.53对各个控制系统进行模拟调试,采用组态软件建立人机监控界面,从而提高工作效率,节约成本,把人从枯燥的工作中解放出来。需要说明的是,本实用新型所述的plc编程控制器可采用mm-40mr12mt-700c型号,产于上海华匠自动化科技有限公司,可由plc编程控制器切换对各个机械臂的信号输入。水平平台104前端设置有一对带有圆形通孔的凸块,中部设置有一对带有圆形通孔的凸块,主要用于液压夯击锤260在竖直方向和水平方向的固定。支撑架103通过螺栓螺母固定在水平平台104前端,用于固定液压夯击锤260的主体部分;铁链架102通过螺栓螺母固定在水平平台104上,在两端装上电机010则可以控制铁链的收放,进一步控制液压夯击锤260旋转;水平平台104的四端装有旋转平台101,分别安装挖机臂210,抓手臂220,切割臂240和钻头臂230。旋转圆台101主要为机械臂部分200提供平台安装,并可以水平旋转机械臂,适合不同角度的工作。旋转平台101的内部安装有液压旋转缸,由液压控制旋转。
40.由图5、图11所示,挖机臂210由挖斗211、液压旋转缸212、机械臂213组成,主要用于挖掘沙砾,泥土碎块等。液压旋转缸212安装在挖斗211和机械臂213之间,通过液压控制可以旋转挖斗211,以适应不同的工作需求。机械臂213则通过底部的小控制箱安装在水平平台部分100的旋转圆台101上。挖机臂210属于现有技术,具体控制如下:plc编程控制器下发指令先控制旋转平台101内部的液压旋转缸,再控制机械臂213上的液压杆调整至一个合适的角度,再控制挖斗211上方的液压旋转缸212控制挖斗211的正装与反装,最后控制挖斗211上的液压杆进行工作。
41.需要说明的是,本实用新型的小控制箱为水平平台部分100和各个机械臂部分200
连接周转部分,小控制箱内主要为油泵,为液压杆提供液压控制,控制系统控制小控制箱从而控制各个机械臂中的液压杆工作。下文中的小控制箱同理。
42.由图6、图11所示,抓手臂220由抓手221和机械臂213组成,主要用于抓取木料,钢管等长条物块。抓手221中部设计有液压旋转缸,可以实现抓手221的大角度转动,以适合不同角度的工作。机械臂213则通过底部的小控制箱安装在水平平台部分100的旋转圆台101上。抓手臂220属于现有技术,具体控制如下:plc编程控制器下发指令先控制旋转平台101内部的液压旋转缸,再控制机械臂213上的液压杆调整至一个合适的角度,再控制抓手221上方的液压旋转缸控制抓手的角度,最后控制抓手221进行工作。
43.由图7、图11所示,钻头臂230由钻头231和机械臂213组成,主要用于打孔,钻孔,破碎墙体结构。机械臂213则通过底部的小控制箱安装在水平平台部分100的旋转圆台101上。钻头臂230属于现有技术,具体控制如下:plc编程控制器下发指令先控制旋转平台101内部的液压旋转缸,再控制机械臂213上的液压杆调整至一个合适的角度,最后控制钻头231进行工作。
44.由图8、图11所示,切割臂240由切割机241和机械臂213组成,主要用于切割木条等,可更换刀片以切割不同材料的物体。切割机241底部通过液压旋转缸和刀片连接,实现刀片可自由旋转,以适应不同的工作需求。机械臂213则通过底部的小控制箱安装在水平平台部分100的旋转圆台101上。切割臂240属于现有技术,具体控制如下:plc编程控制器下发指令先控制旋转平台101内部的液压旋转缸,再控制机械臂213上的液压杆调整至一个合适的角度,再控制切割机241上方的液压旋转缸控制切割机241的角度,最后控制切割机241进行工作。
45.由图9、图11所示,铲臂250由铲斗251和机械臂213组成,主要用于铲平泥土碎石等。机械臂213则通过底部的小控制箱直接安装在水平平台部分100的水平平台104上。铲臂250属于现有技术,具体控制如下:plc编程控制器下发指令控制机械臂213上的调节液压杆,通过调节液压杆之间的伸缩控制铲斗251的工作。
46.由图10、图11所示,液压夯击锤260的主体含有三对带有圆形通孔的凸块,主要用于和水平平台部分100连接固定,液压夯击锤260主要用于破碎石块,均匀石块体积,破碎墙体结构。液压夯击锤260最上端的圆形通孔通过铁链和铁链架102连接,由铁链控制液压夯击锤260处于水平位置还是处于竖直位置;当处于水平位置时,铁链收紧,液压夯击锤260中部的圆形通孔则与水平平台104上端的圆形通孔通过螺栓螺母固定,实现水平夯击;当处于竖直位置时,铁链放松,液压夯击锤260下端的圆形通孔则与水平平台104前端的圆形通孔通过螺栓螺母固定,实现竖直夯击。液压夯击锤260属于现有技术,具体控制如下:plc编程控制器下发指令先控制铁链架102上的电机,电机正转工作,拉直铁链,带动液压夯击锤260呈水平状态;电机反转工作,放松铁链,夯击锤伸长,液压夯击锤260受到自身重力自动呈垂直状态,之后加上螺栓螺母与前端的凸块进行固定,最后控制液压夯击锤260进行工作。
47.下面参照图1-11并结合上述结构技术特征的描述,对本实用新型的多机械臂废弃建筑破拆机器人的具体工作原理进行介绍:
48.1.整个装置按照上述结构组装,由外部遥控设备控制整个装置的运行工作。
49.2.底盘的电机010由外部遥控设备控制工作,带动整个装置运行装置运行至工作场所。
50.3.由外部遥控设备控制各个机械臂和夯击锤工作,带动各个液压旋转缸旋转工作,且各个工作元件都可单独控制。
51.以上所述,仅为本实用新型中的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉该技术的人在本实用新型所揭露的技术范围内,可理解得到的变换或者替换,都应该涵盖在本实用新型的包含范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。