1.本发明涉及驾驶训练技术领域,尤其涉及一种基于实际机动车的机动车驾驶员智能化训练系统。
背景技术:
2.当前,驾驶人培训方面仍主要采用“口传身教”的传统培训模式,随着信息技术的发展,市场上曾出现过一些用于驾驶人培训的驾驶训练模拟器。该类系统可在固定的仿真设备上,通过屏幕上的画面运动营造驾驶模拟环境。由于此类系统不是基于实际车辆平台开发,所营造的驾驶体验以及学员的心理感受均与驾驶实际车辆存在较大差距,难以收到良好的训练效果。
3.授权公告号为cn105654808a的中国专利公开了一种基于实际机动车的机动车驾驶员智能化训练系统,其包括车载智能训练子系统、数据处理子系统、运行管控子系统以及系统级数据通信子系统;所述车载智能训练子系统安装于实际机动车上,用于对驾驶人进行交互式驾驶训练以及采集上报驾驶人训练过程数据;所述数据处理子系统对基础信息进行管理,用于接收、存储与处理所述车载智能训练子系统采集上报的训练过程数据;所述运行管控子系统对车辆被操作和运行状态进行实时监控,并根据实际情况对被监控车辆进行远程操控;所述车载智能训练子系统通过系统级数据通信子系统与数据处理子系统以及运行管控子系统连接并实现双向信息互通。
4.但是上述已公开方案存在如下不足之处:仅仅是基于实际机动车,然后根据虚拟场景进行模拟训练,无法让驾驶人员直观体验车辆起步、刹车、上坡、下坡和转弯的感觉,实际的训练效果较差。
技术实现要素:
5.本发明目的是针对背景技术中存在的驾驶训练模拟器训练效果较差的问题,提出一种基于实际机动车的机动车驾驶员智能化训练系统。
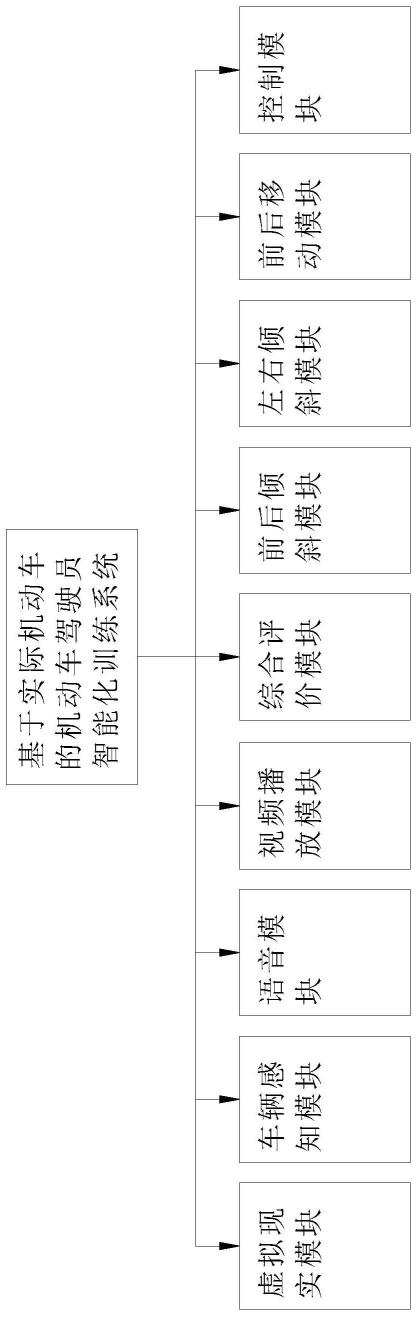
6.一方面,本发明提出一种基于实际机动车的机动车驾驶员智能化训练系统,包括虚拟现实模块、车辆感知模块、语音模块、综合评价模块、前后倾斜模块、左右倾斜模块、前后移动模块和控制模块;机动车停放在车辆支撑板上,机动车内设置驾驶座椅;
7.虚拟现实模块采用ar技术将机动车与虚拟的训练场景结合,驾驶人员通过佩带ar眼镜实现人机交互;
8.车辆感知模块用来采集机动车的各种动作状态,并通过虚拟现实模块将对应的动作融入虚拟的训练场景中;
9.语音模块用来播报训练项目,并根据综合评价模块的评价播报驾驶人员相关训练项目的应对结果;综合评价模块根据车辆感知模块的感知结果,判断驾驶人员采取的操作是否合规;
10.前后倾斜模块用来带动车辆支撑板前后倾斜,从而带动机动车前倾或后仰;左右
倾斜模块用来带动驾驶座椅左右摆动;前后移动模块用来带动机动车前后移动;
11.控制模块与虚拟现实模块、车辆感知模块以及综合评价模块均电性连接,控制模块与语音模块、前后倾斜模块、左右倾斜模块以及前后移动模块均控制连接,控制模块位于机动车内且设有操作屏。
12.优选的,车辆感知模块包括机动车外部多处设置的摄像头以及内部摄像头和传感器,外部摄像头用来监控机动车的灯亮情况,内部摄像头用来监控方向盘动作,传感器用来监控动力轮转动角度、离合器状态、油门状态、刹车状态、亮灯状态。
13.优选的,还包括视频播放模块,视频播放模块用来播放对应训练项目的标准应对情况,并回放驾驶人员在该项目中的表现,形成对比。
14.优选的,前后倾斜模块包括底板、支撑柱、球体a、伸缩装置a和球体b;底板水平设置在,底板位于车辆支撑板下方;支撑柱竖直设置在底板上,支撑柱顶部设置球形槽,球体a配合转动设置在球形槽内,球体a顶部与车辆支撑板底部连接,支撑柱和球体a均设置多组;伸缩装置a设置两组,两组伸缩装置a均竖直设置在底板上,两组伸缩装置a分别位于支撑柱左右两侧;球体b设置两组,两组球体b分别设置在两组伸缩装置a顶部,两组球体b均与车辆支撑板底部接触。
15.优选的,左右倾斜模块为角度调节装置,角度调节装置设置在机动车底部内壁上,驾驶座椅设置在角度调节装置上。
16.优选的,前后移动模块包括立板、伸缩装置b和连接板;立板竖直设置在车辆支撑板上;伸缩装置b水平设置在立板朝向机动车的端面上,伸缩装置b的伸缩端设置连接板,连接板与机动车尾部连接。
17.优选的,伸缩装置b为气缸或液压缸。
18.另一方面,本发明提出一种基于实际机动车的机动车驾驶员智能化训练系统的训练方法,包括以下步骤:s1、驾驶人员进入机动车,并佩带上ar眼镜,进行虚拟和显示的场景交互;s2、通过控制模块的操作屏选择要训练的项目;s3、虚拟现实模块加载对应的虚拟现实场景,驾驶人员对机动车进行操作,车辆感知模块实时感知车辆状态;s4、综合评价模块根据车辆感知模块的感知结果,判断驾驶人员采取的操作是否合规,并将结果显示在操作屏上;s5、驾驶人员选择其他训练项目,进行驾驶训练。
19.与现有技术相比,本发明具有如下有益的技术效果:能完成智能化驾驶训练,提高了驾驶训练效率,且在训练过程中,能模拟实际驾驶过程中的起步、刹车、上坡、下坡和左右转弯,非常贴合实际情况,再结合视频播放和综合评价,有助于驾驶人员快速掌握驾驶技能,训练效果好。
附图说明
20.图1为本发明一种实施例的结构示意图;
21.图2为本发明提出的基于实际机动车的机动车驾驶员智能化训练系统的实物图;
22.图3为本发明提出的训练方法的流程图。
23.附图标记:1、车辆支撑板;2、底板;3、支撑柱;4、球体a;5、伸缩装置a;6、球体b;7、机动车;8、驾驶座椅;9、角度调节装置;10、立板;11、伸缩装置b;12、连接板。
具体实施方式
24.实施例一
25.如图1-2所示,本发明提出的一种基于实际机动车的机动车驾驶员智能化训练系统,包括虚拟现实模块、车辆感知模块、语音模块、视频播放模块、综合评价模块、前后倾斜模块、左右倾斜模块、前后移动模块和控制模块;机动车7停放在车辆支撑板1上,机动车7内设置驾驶座椅8;
26.虚拟现实模块采用ar技术将机动车7与虚拟的训练场景结合,驾驶人员通过佩带ar眼镜实现人机交互;
27.车辆感知模块用来采集机动车7的各种动作状态,并通过虚拟现实模块将对应的动作融入虚拟的训练场景中,车辆感知模块包括机动车7外部多处设置的摄像头以及内部摄像头和传感器,外部摄像头用来监控机动车7的灯亮情况,内部摄像头用来监控方向盘动作,传感器用来监控动力轮转动角度、离合器状态、油门状态、刹车状态、亮灯状态;
28.语音模块用来播报训练项目,并根据综合评价模块的评价播报驾驶人员相关训练项目的应对结果;综合评价模块根据车辆感知模块的感知结果,判断驾驶人员采取的操作是否合规;视频播放模块用来播放对应训练项目的标准应对情况,并回放驾驶人员在该项目中的表现,形成对比;
29.前后倾斜模块用来带动车辆支撑板1前后倾斜,从而带动机动车7前倾或后仰;左右倾斜模块用来带动驾驶座椅8左右摆动;前后移动模块用来带动机动车7前后移动;
30.控制模块与虚拟现实模块、车辆感知模块以及综合评价模块均电性连接,控制模块与语音模块、前后倾斜模块、左右倾斜模块以及前后移动模块均控制连接,控制模块位于机动车7内且设有操作屏。
31.智能化训练过程如下:驾驶人员进入机动车7,并佩带上ar眼镜,然后通过控制模块的操作屏选择要训练的项目,虚拟现实模块加载对应的虚拟现实场景,驾驶人员对机动车7进行操作,车辆感知模块实时感知车辆状态,当驾驶人员起步时,前后移动模块带动车辆向前移动模拟起步推背感,前推速度根据油门踩动量决定,当驾驶人员踩刹车时,前后移动模块带动车辆向后移动模拟真实刹车情况,后拉速度根据油门踩动量决定,当驾驶人员在虚拟现实场景中驾驶车辆上坡时,前后倾斜模块带动机动车7后仰,后仰角度根据虚拟场景中的坡度决定,当驾驶人员在虚拟现实场景中驾驶车辆下坡时,前后倾斜模块带动机动车7前倾,前倾角度根据虚拟场景中的坡度决定,当驾驶人员转动方向盘时,左右倾斜模块带动驾驶座椅8转动,左右偏转角度根据反向盘转动角度以及当前车速决定,训练项目完成后,综合评价模块车辆感知模块的感知结果,判断驾驶人员采取的操作是否合规,并将结果显示在操作屏上,一个项目完成后,驾驶人员选择其他训练项目,进行驾驶训练。
32.本实施例中,能完成智能化驾驶训练,提高了驾驶训练效率,且在训练过程中,能模拟实际驾驶过程中的起步、刹车、上坡、下坡和左右转弯,非常贴合实际情况,再结合视频播放和综合评价,有助于驾驶人员快速掌握驾驶技能,训练效果好。
33.实施例二
34.如图2所示,本发明提出的一种基于实际机动车的机动车驾驶员智能化训练系统,相较于实施例一,前后倾斜模块包括底板2、支撑柱3、球体a4、伸缩装置a5和球体b6;底板2水平设置在,底板2位于车辆支撑板1下方;支撑柱3竖直设置在底板2上,支撑柱3顶部设置
球形槽,球体a4配合转动设置在球形槽内,球体a4顶部与车辆支撑板1底部连接,支撑柱3和球体a4均设置多组;伸缩装置a5设置两组,两组伸缩装置a5均竖直设置在底板2上,两组伸缩装置a5分别位于支撑柱3左右两侧;球体b6设置两组,两组球体b6分别设置在两组伸缩装置a5顶部,两组球体b6均与车辆支撑板1底部接触。左右倾斜模块为角度调节装置9,角度调节装置9设置在机动车7底部内壁上,驾驶座椅8设置在角度调节装置9上。前后移动模块包括立板10、伸缩装置b11和连接板12;立板10竖直设置在车辆支撑板1上;伸缩装置b11水平设置在立板10朝向机动车7的端面上,伸缩装置b11的伸缩端设置连接板12,伸缩装置b11为气缸或液压缸,连接板12与机动车7尾部连接。
35.本实施例中,两组伸缩装置a5一伸一缩即可带动车辆支撑板1转动,从而模拟机动车7的前倾和后仰,伸缩装置b11的伸缩可以带动机动车7的前后移动,从而模拟机动车7的起步和刹车,角度调节装置9可以调节驾驶座椅8的左右倾斜角度,从而模拟机动车7的转弯,贴合实际驾驶情况,训练效果好。
36.实施例三
37.如图3所示,基于上述一种基于实际机动车的机动车驾驶员智能化训练系统的训练方法,包括以下步骤:
38.s1、驾驶人员进入机动车7,并佩带上ar眼镜,进行虚拟和显示的场景交互;
39.s2、通过控制模块的操作屏选择要训练的项目;
40.s3、虚拟现实模块加载对应的虚拟现实场景,驾驶人员对机动车7进行操作,车辆感知模块实时感知车辆状态;
41.s4、综合评价模块根据车辆感知模块的感知结果,判断驾驶人员采取的操作是否合规,并将结果显示在操作屏上;
42.s5、驾驶人员选择其他训练项目,进行驾驶训练。
43.本实施例中,能完成智能化驾驶训练,提高了驾驶训练效率,且在训练过程中,能模拟实际驾驶过程中的起步、刹车、上坡、下坡和左右转弯,非常贴合实际情况,再结合视频播放和综合评价,有助于驾驶人员快速掌握驾驶技能,训练效果好。
44.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。