1.本发明涉及隧道衬砌表面病害检测技术领域,尤其涉及一种隧道图像采集的车载相机智能补光装置及方法。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.在公路隧道衬砌表面病害检测领域,利用标准化高分辨率ccd工业相机记录病害图像信息的技术手段已有较多应用。由于隧道内照明条件受限,此时需要补光灯提供光源,辅助ccd相机在隧道内检测作业时达到理想的成像效果。相机工作场景为高速行驶汽车,为了保证拍摄图像清晰度,避免出现重影现象,相机的曝光时间需要设置的很小,通过速度计算曝光时间设置为256微妙,光圈设置1/8,这就要求补光强度更高同时光照要更均匀。
4.由于隧道内照明环境复杂,各段隧道亮度不均,同时隧道为穹顶结构,相机到隧道各部分距离相差较大,普通三车道隧道拍摄范围在3-6米之间。远距离合适的补光强度在近的地方图像会出现过爆现象,而近距离合适的补光强度在远的地方可能出现强度不够图像过暗失去细节信息。
技术实现要素:
5.为了解决上述问题,本发明提出了一种隧道图像采集的车载相机智能补光装置及方法,能够根据不同环境光线和拍摄距离实现无极调光。
6.在一些实施方式中,采用如下技术方案:
7.一种隧道图像采集的车载相机智能补光装置,包括:
8.光敏检测模块,用于根据当前环境光照强度的变化输出相应的电信号;
9.激光测距模块,用于对检测目标发射激光脉冲并接收反射光,实时计算与检测目标之间的距离;
10.控制模块,用于接收光敏检测模块输出的电信号信息以及激光测距模块与检测目标之间的距离信息,并根据接收到的信息对相机补光灯的亮度进行调节控制;
11.相机补光灯,用于在控制模块的控制下自动调节亮度,实现智能补光。
12.作为进一步地方案,所述控制模块预先构建最佳光照强度与距离检测目标之间的距离和环境光照强度之间的对应关系;其中,环境光照强度通过光敏检测模块检测到的电信号来表征;
13.通过由激光测距模块检测到的与检测目标之间的距离信息,以及由光敏检测模块获取到的当前环境光照强度信息,获得当前检测目标所需的最佳光照强度;将所述最佳光照强度l与当前环境光照强度lf进行对比,对相机补光灯的亮度进行调节,以满足lf处于最佳光照强度l所在的设定区间内。
14.作为进一步地方案,所述控制模块预先构建最佳光照强度与距离检测目标之间的
距离和环境光照强度之间的对应关系,具体过程为:
15.按照项目需求将相机按照不同的设定工作距离安置并开始拍摄图像,对相机进行不同强度的补光,并分析不同光照强度下拍摄的图像的灰度分布情况,当图像灰度直方图的顶峰满足设定要求时,作为不同距离下光强强度的最佳光照强度。
16.作为进一步地方案,所述相机补光灯包括至少一组补光灯板,所有补光灯板的亮度相同。
17.作为进一步地方案,还包括:运算放大器;用于将光敏检测模块输出的电信号进行放大处理后,向控制模块输出脉冲信号。
18.作为进一步地方案,还包括:pwm驱动模块,用于输出驱动信号,以对补光灯的亮度进行调节控制。
19.作为进一步地方案,还包括:显示模块,用于显示检测目标距离、当前光照强度以及电源余量信息。
20.在另一些实施方式中,采用如下技术方案:
21.一种隧道图像采集的车载相机智能补光方法,包括:
22.根据当前环境光照强度的变化输出相应的电信号;并检测与检测目标之间的距离;
23.基于所述电信号和距离信息,确定当前检测目标所需的最佳光照强度l;
24.将所述最佳光照强度l与当前环境光照强度lf进行对比,对相机补光灯的亮度进行调节,以满足lf处于最佳光照强度l所在的设定区间内。
25.作为进一步地方案,基于所述电信号和距离信息,对相机补光灯的亮度进行调节控制,具体过程包括:
26.预先构建最佳光照强度与距离检测目标之间的距离和环境光照强度之间的对应关系;其中,环境光照强度通过光敏检测模块检测到的电信号来表征;
27.通过由激光测距模块检测到的与检测目标之间的距离信息,以及由光敏检测模块获取到的当前环境光照强度信息,获得当前检测目标所需的最佳光照强度;将所述最佳光照强度l与当前环境光照强度lf进行对比,对相机补光灯的亮度进行调节,以满足lf处于最佳光照强度l所在的设定区间内。
28.作为进一步地方案,预先构建最佳光照强度与距离检测目标之间的距离和环境光照强度之间的对应关系,具体过程为:
29.按照项目需求将相机按照不同的设定工作距离安置并开始拍摄图像,对相机进行不同强度的补光,并分析不同光照强度下拍摄的图像的灰度分布情况,当图像灰度直方图的顶峰满足设定要求时,作为不同距离下光强强度的最佳光照强度。
30.与现有技术相比,本发明的有益效果是:
31.(1)本发明基于光敏电阻的环境光照强度与基于测距模块的距离参数,并根据隧道场景图像检测试验取得的距离、环境照度、最佳照度之间的关系,对隧道场景检测的满足检测要求的光照强度进行实时调节,可以得出适应不同工作距离条件下的补光灯工作亮度,形成隧道场景下的智能补光方法。
32.本发明的其他特征和附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本方面的实践了解到。
附图说明
33.图1为本发明实施例中的隧道图像采集的车载相机智能补光装置示意图;
34.图2为本发明实施例中的车载相机结构示意图;
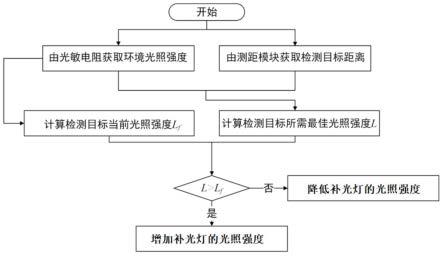
35.图3为本发明实施例中的智能补光方法示意图;
36.其中,1.控制模块;2.激光测距模块;3.光敏检测模块;4.显示模块;5.相机补光灯。
具体实施方式
37.应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
38.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
39.实施例一
40.在一个或多个实施方式中,公开了一种隧道图像采集的车载相机智能补光装置,结合图1,具体包括:
41.(1)光敏检测模块3,用于根据当前环境光照强度的变化输出相应的电信号;
42.本实施例中,光敏检测模块可以为光敏电阻,也可以为光敏二极管和光敏三极管,利用其对光的敏感性,可以根据光照强度的变化输出相应的电信号。光敏检测模块与控制模块连接,并将表征光强的电信号传输给控制模块。
43.(2)激光测距模块2,用于对检测目标发射激光脉冲并接收反射光,实时计算与检测目标之间的距离;
44.激光测距模块由激光二极管对检测目标发射激光脉冲并接收反射光,实时计算获取与检测目标之间的距离,激光测距模块与控制模块连接,并将距离信号传输给控制模块。
45.(3)控制模块1,用于接收光敏检测模块输出的电信号信息以及激光测距模块与检测目标之间的距离信息,并根据接收到的信息对相机补光灯的亮度进行调节控制;
46.(4)相机补光灯5,用于在控制模块的控制下自动调节亮度,实现智能补光。结合图2,相机补光灯可以为多组补光灯板,分别布设在相机的周围。
47.另外,车载相机智能补光装置还包括:
48.(5)pwm(pulse width modulation,脉冲宽度调制)驱动模块,集成在控制模块上,用于对补光灯的亮度进行精确控制,实现无级调光,以满足ccd相机在不同光线工况下的拍摄要求。
49.(6)运算放大器,用于对模拟信号进行放大处理,因传感器得到的电信号幅度较小,难以直接进行a/d转换,故将传感器电信号由运算放大器的输入端输入,由运算放大器的输出端输出脉冲信号,并与控制模块的a\d转换器采样端连接。
50.(7)电源模块,用于补光装置供电;
51.(8)显示模块5,用于显示检测目标距离、光照强度、电源余量。
52.本实施例中,控制模块可以为mcu单片机,分别与激光测距模块、光敏检测模块、电源模块、显示模块、pwm驱动模块和运算放大器连接,控制模块mcu的a\d转换器采样端连接激光测距模块和光敏检测模块。
53.本实施例中,控制模块预先构建最佳光照强度与距离检测目标之间的距离和环境光照强度之间的对应关系;其中,环境光照强度通过光敏检测模块检测到的电信号来表征。
54.本实施例根据隧道图像采集试验设定最佳光照强度与检测距离之间的关系为:
55.l=f(d,g(lf)),i=g(lf)
56.其中,l为根据试验计算得到的最佳光照强度,与距离检测目标的远近以及环境光照强度有关;d为检测距离,lf为环境光照强度,i为光敏电阻中通过电流。
57.按照项目需求将相机按照不同的设定工作距离安置并开始拍摄图像,对相机进行不同强度的补光,并分析不同光照强度下拍摄的图像的灰度分布情况,当图像灰度直方图的顶峰满足设定阈值范围时,作为不同距离下光强强度的最佳光照强度。
58.本实施例中,通过分析图像的色阶分布,研究补光强度等因素对图像曝光情况的影响。色阶分布图使用曲线峰值的方式来显示图元在图片中的分布情况,以及图片在暗调、中间调和高光中是否包含足够的细节。提取色阶图像峰值像素值,色阶图中值越接近像素中值127说明图像色阶分布越好,设置阈值范围为100-154区域,在这个范围的补光不会出现过爆或者过暗。
59.然后实际图像采集过程中,结合图3,由激光测距模块检测到的与检测目标之间的距离信息,以及由光敏检测模块获取到的当前环境光照强度信息,获得当前检测目标所需的最佳光照强度;将最佳光照强度l与当前环境光照强度lf进行对比,当l>lf时,增加补光灯的亮度;当l<lf时,降低补光灯的亮度;通过对相机补光灯的亮度进行调节,以满足lf处于最佳光照强度l所在的设定区间内。
60.本实施例中,进行补光灯亮度调节时,相机补光灯包括至少一组补光灯板,所有补光灯板的亮度相同,使图像灰度分布保持均匀。由此可以得出不同工作距离条件下补光灯最合适的工作亮度和补光条件,实现隧道场景下的智能补光。
61.实施例二
62.在一个或多个实施方式中,公开了一种隧道图像采集的车载相机智能补光方法,具体包括如下过程:
63.(1)根据当前环境光照强度的变化输出相应的电信号;并检测与检测目标之间的距离;
64.(2)基于所述电信号和距离信息,确定当前检测目标所需的最佳光照强度l;
65.(3)将所述最佳光照强度l与当前环境光照强度lf进行对比,对相机补光灯的亮度进行调节,以满足lf处于最佳光照强度l所在的设定区间内。
66.其中,基于所述电信号和距离信息,对相机补光灯的亮度进行调节控制,具体过程包括:
67.预先构建最佳光照强度与距离检测目标之间的距离和环境光照强度之间的对应关系;其中,环境光照强度通过光敏检测模块检测到的电信号来表征;具体过程为:
68.(3-1)按照项目需求将相机按照不同的设定工作距离安置并开始拍摄图像,对相机进行不同强度的补光,并分析不同光照强度下拍摄的图像的灰度分布情况,当图像灰度
直方图的顶峰满足设定要求时,作为不同距离下光强强度的最佳光照强度。
69.(3-2)通过由激光测距模块检测到的与检测目标之间的距离信息,以及由光敏检测模块获取到的当前环境光照强度信息,获得当前检测目标所需的最佳光照强度;将所述最佳光照强度l与当前环境光照强度lf进行对比,对相机补光灯的亮度进行调节,以满足lf处于最佳光照强度l所在的设定区间内。
70.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。