技术特征:
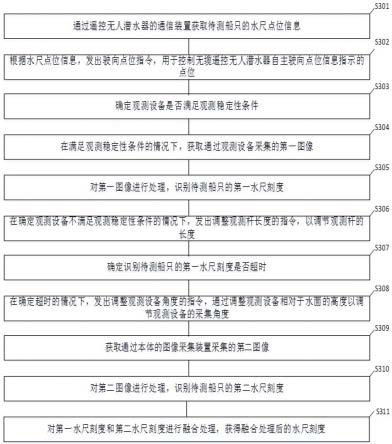
1.一种水尺检测的方法,应用于无缆遥控无人潜水器,其特征在于,所述无缆遥控无人潜水器包括本体和可伸缩调节的观测杆,所述观测杆设置在所述本体上侧,所述观测杆的一端安装有观测设备,所述观测设备位于水面之上,用于观测水面的水尺刻度,所述方法包括:确定所述观测设备是否满足观测稳定性条件;在满足观测稳定性条件的情况下,获取通过所述观测设备采集的第一图像,所述第一图像具有待测船只的水面水尺刻度;以及对所述第一图像进行处理,识别所述待测船只的第一水尺刻度。2.如权利要求1所述的方法,其特征在于,还包括:获取通过所述本体的图像采集装置采集的第二图像,所述第二图像具有所述待测船只的水面下水尺刻度;对所述第二图像进行处理,识别所述待测船只的第二水尺刻度;以及对所述第一水尺刻度和所述第二水尺刻度进行融合处理,获得融合处理后的水尺刻度。3.如权利要求1所述的方法,其特征在于,还包括:在确定所述观测设备不满足观测稳定性条件的情况下,发出调整所述观测杆长度的指令,以调节所述观测杆的长度。4.如权利要求1所述的方法,其特征在于,所述确定所述观测设备是否满足观测稳定性条件包括:获取所述观测设备的晃动线速度;以及在所述晃动线速度小于预设阈值的情况下,确定所述观测设备满足观测稳定性条件,否则,确定所述观测设备不满足观测稳定性条件。5.如权利要求1至4任一者所述的方法,其特征在于,还包括:确定识别所述待测船只的第一水尺刻度是否超时;以及在确定超时的情况下,发出调整所述观测设备角度的指令,通过调整所述观测设备相对于水面的高度以调节所述观测设备的采集角度。6.如权利要求1至4任一者所述的方法,其特征在于,还包括:通过所述遥控无人潜水器的通信装置获取所述待测船只的水尺点位信息;以及根据所述水尺点位信息,发出驶向点位指令,用于控制所述无缆遥控无人潜水器自主驶向所述水尺点位信息指示的点位。7.一种用于水尺检测的无缆遥控无人潜水器,其包括:本体;观测杆,其设置在所述本体上侧,所述观测杆的一端安装有观测设备,所述观测设备位于水面之上,用于观测水尺刻度;所述本体包括处理装置,用于执行如权利要求1至6任一者所述的方法。8.如权利要求7所述的遥控无人潜水器,其特征在于,所述本体还包括:图像采集装置,用于采集第二图像,所述第二图像具有待测船只的水面下水尺刻度。9.如权利要求7或8所述的遥控无人潜水器,其特征在于,所述本体还包括:通信装置,用于接收水尺点位信息,并将所述水尺点位信息发送至所述处理装置。
10.如权利要求9所述的遥控无人潜水器,其特征在于,所述本体还包括:运动控制装置,用于根据所述处理装置发出的驶向点位指令控制遥控无人潜水器自主驶向所述水尺点位信息指示的点位。11.一种电子设备,包括:处理器;以及存储器,存储有计算机指令,当所述计算机指令被所述处理器执行时,使得所述处理器执行权利要求1-6任一者所述的方法。12.一种非瞬时性计算机存储介质,存储有计算机程序,当所述计算机程序被多个处理器执行时,使得所述处理器执行权利要求1-6任一者所述的方法。
技术总结
本申请涉及用于水尺检测的无缆遥控无人潜水器和水尺检测的方法,该方法应用于无缆遥控无人潜水器,该无缆遥控无人潜水器包括本体和可伸缩调节的观测杆,观测杆设置在本体上侧,观测杆的一端安装有观测设备,观测设备位于水面之上,用于观测水面的水尺刻度,该方法包括:确定观测设备是否满足观测稳定性条件;在满足观测稳定性条件的情况下,获取通过观测设备采集第一图像,第一图像具有待测船只的水面水尺刻度;以及对第一图像进行处理,识别待测船只的第一水尺刻度。根据本申请方案,在水尺检测的过程中,无人潜水器只需安装自动伸缩的观测杆,能够有效减少波浪对观测设备和水尺刻度读数的干扰,实现自动水尺检测功能,提高了检测效率和准确度。了检测效率和准确度。了检测效率和准确度。
技术研发人员:魏建仓 侯明波 张增虎 张瑞涛 赵国腾 徐俊博
受保护的技术使用者:深之蓝海洋科技股份有限公司
技术研发日:2022.12.06
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。