1.本发明属于智能设备、数据挖掘技术领域,具体涉及一种在考虑设备未来运行状态基础上的参数寻优方法。
背景技术:
2.融合新一代信息技术助力设备的数智化升级作为智能制造发展规划的重点突破方向,已经是推进设备高质量发展、推动数字经济与实体经济的关键。复杂机电设备作为设备数智化升级的主要载体之一,由于内部各系统耦合后的复杂性原因,运行过程中各系统之间信息、能量等传递机理存在不完全清晰现象,导致在运行过程中输入的参数无法促使其输出预期目标,或者其性能表现低效。
3.传统的寻找复杂机电设备输入参数的方法主要为:构建机理模型后基于经验或优化算法求解最优输入参数,该方法假设了复杂机电设备理论复杂度等于实际复杂度,且求解的输入参数具有经验化、静态化的特点。因此,该方法容易偏离复杂机电设备的实际运行状态且方法可迁移能力不足。
技术实现要素:
4.为了优化复杂机电设备运行过程中输入参数的调整对其未来运行目标产生的不利影响、解决传统寻找复杂机电设备输入参数的方法存在容易偏离其实际运行状态及可迁移能力不足的问题,本发明提供了一种在考虑设备未来运行状态基础上的参数寻优方法,目的是在设备运行过程中,预测下一时间段或时间点设备的运行参数的输入值,进而保证设备的高效运行。本发明依靠大数据技术直接挖掘设备运行过程中输入参数和输出目标之间的关系,寻找到未来时间复杂机电设备可能输出的最优目标,最终预测未来时间设备运行应该输入的参数,该方法避免了构建复杂的机理模型且建立的数据模型可迁移能力强。
5.本发明为解决上述技术问题所采取的技术方案如下:
6.一种在考虑设备未来运行状态基础上的参数寻优方法,包括以下步骤:
7.步骤1、收集历史状态下设备的运行参数输入值数据和运行状态目标值数据,得到数据集;
8.步骤2、建立设备的运行参数输入值与运行状态目标值之间的线性回归模型,所述线性回归模型如下:
9.yi=w*xi b
ꢀꢀꢀ
(1)
10.其中,yi表示设备的第i个运行状态目标值,xi表示设备的第i个运行状态所有输入的运行参数组成的列向量,w表示yi和xi的关系参数中的行向量,b表示 yi和xi的关系参数中的截距;
11.将所述数据集代入所述线性回归模型,提取得到关系参数中的行向量w和截距b;
12.步骤3、利用自回归算法构建时间序列模型,将全部的所述运行状态目标值数据代入到所述时间序列模型中,得到当前运行状态目标值相邻的下一个运行状态目标值的预测
值,所述时间序列模型如下:
13.f(y1,y2,
…yt
)=p_y
t 1
ꢀꢀꢀ
(2)
14.其中,f表示时间序列模型的函数表达式,y
t
表示当前运行状态目标值, p_y
t 1
表示下一个运行状态目标值的预测值;
15.步骤4、构建用于预测下一个运行状态下设备的运行参数输入值的方程组,采用优化算法求解所述方程组的可行解,所述可行解即为下一个运行状态下设备的运行参数输入值的预测值,所述方程组如下:
16.p_y
t 1
=wx
i 1
b
ꢀꢀꢀ
(3)
17.min(|p_y
t 1-(w*p_x
i 1
b)|)
ꢀꢀꢀ
(4)
18.k1≤x
i 1
≤k2ꢀꢀꢀ
(5)
19.其中,p_x
i 1
表示方程组的可行解即下一个运行状态下设备的运行参数输入值的预测值,k1表示各运行参数的最小值组成的列向量,k2表示各运行参数的最大值组成的列向量。
20.与现有技术相比,本发明具有以下有益效果:
21.本发明提出了一种在考虑设备未来运行状态基础上的参数寻优方法,该方法通过对未来一个时间点或者时间段设备的运行状态目标值进行预测,再构建方程组,根据设备的运行状态目标值的预测值对下一个运行状态下设备的运行参数输入值进行预测,从而有效确定出下一个运行状态下设备的最优运行参数输入值,完成设备的参数寻优,使设备能够根据预测的运行状态目标来高效运行,避免了设备运行过程中运行参数的调整对未来设备运行目标产生的不利影响,为设备的高效稳定运行以及控制提供技术基础。
附图说明
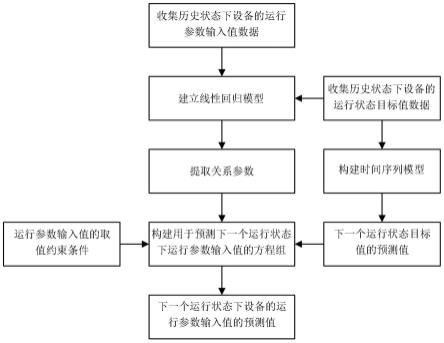
22.图1为其中一个实施例中本发明一种在考虑设备未来运行状态基础上的参数寻优方法的整体流程图;
23.图2为本发明实施例构建的线性回归模型的预测效果图;
24.图3为本发明实施例构建的时间序列模型的预测效果图;
25.图4为利用遗传算法求解下一个运行状态下设备的运行参数输入值收敛过程图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.在其中一个实施例中,本发明提出一种在考虑设备未来运行状态基础上的参数寻优方法,主要包括以下步骤:设备输入的运行参数和设备运行目标之间的关系的建立、未来一个时间点(或者时间段)设备运行目标的预测(每完成一个目标的时间点或时间段为一个运行状态)、下一设备运行目标下的输入的运行参数预测。
28.具体地,如图1所示,本发明提供的一种在考虑设备未来运行状态基础上的参数寻优方法包括以下步骤:
29.步骤1、收集历史状态下设备的运行参数输入值数据和运行状态目标值数据,得到数据集。
30.步骤2、设备的运行参数输入值和运行状态目标值之间的关系式采用线性回归模型建立,建立过程是基于历史数据(xi,yi)获得(w,b),线性回归模型如式(1) 所示:
31.yi=w*xi b
ꢀꢀꢀ
(1)
32.其中,yi表示设备的第i个运行状态目标值,xi表示设备的第i个运行状态所有输入的运行参数组成的列向量,w表示yi和xi的关系参数中的行向量,b表示 yi和xi的关系参数中的截距。
33.将数据集代入公式(1)所示的线性回归模型中,提取得到关系参数——行向量w和截距b。
34.步骤3、未来一个时间点(或者时间段)设备运行目标采用自回归模型预测,目标是预测下一状态设备输出的目标,具体地,利用自回归算法构建时间序列模型,将全部的运行状态目标值数据代入到时间序列模型中,得到当前运行状态目标值相邻的下一个运行状态目标值的预测值,其中时间序列模型如式(2) 所示:
35.f(y1,y2,
…yt
)=p_y
t 1
ꢀꢀꢀ
(2)
36.其中,f表示时间序列模型的函数表达式,y
t
表示当前运行状态目标值, p_y
t 1
表示下一个运行状态目标值的预测值,即通过当前状态下及其紧前的t-1 个运行状态的目标值预测下一个运行状态目标值。
37.可选地,利用自回归算法构建时间序列模型时,设定模型阶数为1,以简化计算。
38.步骤4、构建用于预测下一个运行状态下设备的运行参数输入值的方程组,采用优化算法求解方程组的可行解,该可行解即为下一个运行状态下设备的运行参数输入值的预测值,其中方程组如下:
39.p_y
t 1
=wx
i 1
b
ꢀꢀꢀ
(3)
40.min(|p_y
t 1-(w*p_x
i 1
b)|)
ꢀꢀꢀ
(4)
41.k1≤x
i 1
≤k2ꢀꢀꢀ
(5)
42.其中,p_x
i 1
表示方程组的可行解即下一个运行状态下设备的运行参数输入值的预测值,k1表示各运行参数的最小值组成的列向量,k2表示各运行参数的最大值组成的列向量。
43.经过上述步骤1~步骤3后,p_y
t 1
、w和b均为已知,下一个运行状态下设备的运行参数输入值的预测即根据式(3)求得满足条件的可行解p_x
i 1
,求解过程采用优化算法例如遗传算法等,目标值如式(4)所示,设备的运行参数输入值的取值约束条件如式(5)所示。
44.本实施例所提出的一种在考虑设备未来运行状态基础上的参数寻优方法,通过对未来一个时间点或者时间段设备的运行状态目标值进行预测,再构建方程组,根据设备的运行状态目标值的预测值对下一个运行状态下设备的运行参数输入值进行预测,从而有效确定出下一个运行状态下设备的最优运行参数输入值,完成设备的参数寻优,使设备能够根据预测的运行状态目标来高效运行,避免了设备运行过程中运行参数的调整对未来设备运行目标产生的不利影响,为设备的高效稳定运行以及控制提供技术基础。
45.接下来,以高温双轴材料力学性能测试设备的关键组件之机械加载主轴的输入参数预测为一个实施例,对本发明的参数寻优方法的过程做进一步详细的说明。
46.选取测试设备的机械加载主轴x轴的运行过程,运行参数的输入值为沿x 轴正负两个方向加载的x1力值和x2力值,输出的运行状态目标值是x轴中心点的x坐标绝对值,本实施例中设定了一个运行状态的时间跨度为10s,即每 10秒使用的输入参数确定一个机械加载主轴x轴的运行状态。
47.以10s为时间间隔收集一次材料测试过程中机械加载主轴的运行参数输入值数据(x1力值、x2力值)和输出的运行状态目标值数据(x轴中心点的x 坐标绝对值)形成数据集,收集的数据集大小为259个样本。
48.选取数据集的前249个样本数据,以训练数据和预测数据比为4比1的比例对249个样本数据进行数据划分,利用机器学习算法之线性回归算法(linearregression,lr)构建运行参数输入值数据与运行状态目标值数据之间的线性回归模型。用划分50个预测数据的验证的线性回归模型的预测效果见图2,平均绝对误差为0.058,由此可见所构建的线性回归模型预测效果优异。
49.提取线性回归模型中参数数据与目标数据的关系参数,即式(1)中的 w=[2.4031,-2.2067]、b=1.2386。
[0050]
选取数据集中的所有运行状态目标值数据,利用自回归算法(autoregressive,ar)并设定模型阶数为1进而构建目标数据的时间序列模型,用来预测机械加载主轴未来一个运行状态的下的运行状态目标值。基于上一个运行状态目标值预测下一个运行状态目标值在数据集中共预测了258次,时间序列模型的预测效果对比见图3,平均绝对误差为0.0101,由此可见所构建的时间序列模型预测效果优异。
[0051]
选取利用所构建的时间序列模型预测的第250个运行状态目标值 p_y
250
=6.02292,即式(3)中的p_y
t 1
值;因为x1力值和x2力值随时间变化有上升的趋势,因此选取预测目标值所处的状态的上一个状态的x1力值和x2 力值的真实值作为k1,则相对于第250个运行状态的k1值为 [16.20483,15.50293]
t
,k2的取值如式(6)所示,其中n为已经采集到的数据集,在本实施例中n的取值为249,则k2的值为[16.72363,15.99121]
t
。
[0052][0053]
针对于第250个位置状态的参数预测,参考式(4)和式(5),基于上述求得的w值、b值、p_y
250
值、k1值和k2值,选用具有代表性的优化算法—遗传算法求解p_x
i 1
值,编码方式为二进制编码,交叉概率为0.4,变异概率为0.05,适应度函数f如式(7)所示,以下一个运行状态为例,参数求解过程见图4,随迭代次数的增加,公式(4)所示的目标值趋近于零(目标值最优值为0),收敛效果好,并且x1力值的预测值和真实值分别为32723.372和32714.84375, x2力值的预测值和真实值分别为31300.44596和31311.03516,可见x1力值和 x2力值的预测值分别接近各自的真实值。
[0054][0055]
与求第250个运行状态的参数数据的过程相同,第250至第259个运行状态的参数值的真实值与预测值见表1,进而验证了本发明中参数优化方法的有效性。
[0056]
表1
[0057][0058][0059]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0060]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。