1.本技术涉及遥控无人潜水器技术领域,尤其涉及一种用于水尺检测的无缆遥控无人潜水器和水尺检测的方法。
背景技术:
2.在船只进港后,需要对船只的信息进行识别核实,包括对船只的入水深度进行观测和识别,获得数据进行上报,经过数据中心处理,计算船只的载重量。
3.目前,检测水尺刻度常用方法包括两种,一种是通过在船上固定的一个机械装置,通过吊一个摄像机或者其他观测装置的方式去获得船上的水尺刻度,另一种是控制无人机飞到船只水尺刻度的位置,读取水尺图像然后回传,通过人或算法去读取水尺刻度。
4.然而,对于第一种方法,因为机械装置固定在船体上,当需要检测多个点位时,需要准备多个机械装置或者要反复拆装,测量过程麻烦,效率低下;而且,机械装置垂吊摄像机的方式,容易受到风向的影响,很难保证摄像机的视角和抖动。对于第二种方法,无人机只能在水面上飞行,获取的视频依然只有水上,无法快速消除波浪对水尺读数的影响;而且,观察水尺刻度需要相对水平视角,无人机接近水面飞行时,有被水浪接触的风险。
技术实现要素:
5.有鉴于此,本技术提供了一种用于水尺检测的无缆遥控无人潜水器和水尺检测的方法,该无缆遥控无人潜水器包括本体和可伸缩调节的观测杆,观测杆设置在本体上侧,观测杆的一端安装有观测设备(例如,摄像头),在将遥控无人潜水器驶向船只的测量点位后,通过观测设备获得与水尺刻度相关的图像,在对图像进行处理后,就能获得船只的水尺刻度。
6.根据本技术的第一个方面,提供一种水尺检测的方法,应用于无缆遥控无人潜水器,其特征在于,所述无缆遥控无人潜水器包括本体和可伸缩调节的观测杆,所述观测杆设置在所述本体上侧,所述观测杆的一端安装有观测设备,所述观测设备位于水面之上,用于观测水面的水尺刻度,所述方法包括:确定所述观测设备是否满足观测稳定性条件;在满足观测稳定性条件的情况下,获取通过所述观测设备采集的第一图像,所述第一图像具有待测船只的水面水尺刻度;以及对所述第一图像进行处理,识别所述待测船只的第一水尺刻度。
7.根据本技术的二个方面,提供一种用于水尺检测的无缆遥控无人潜水器,其包括:本体;观测杆,其设置在所述本体上侧,所述观测杆的一端安装有观测设备,所述观测设备位于水面之上,用于观测水尺刻度;所述本体包括处理装置,用于执行如第一个方面所述的方法。
8.根据本技术的三个方面,提供一种电子设备,包括:
处理器;以及存储器,存储有计算机指令,当所述计算机指令被所述处理器执行时,使得所述处理器执行第一个方面所述的方法。
9.根据本技术的第四个方面,提供一种非瞬时性计算机存储介质,存储有计算机程序,当所述计算机程序被多个处理器执行时,使得所述处理器执行第一个方面所述的方法。
10.根据本技术提供的用于水尺检测的无缆遥控无人潜水器和水尺检测的方法,在进行水尺检测的过程中,无人潜水器只需安装观测杆就能实现自动检测,无需准备复杂的测量设备,也无需人工直接参与测量,并且能够有效减少波浪对观测设备和水尺刻度读数的干扰,通过识别水尺和水平面交接处的读数,实现自动水尺检测功能,从而在简化检测设备的同时,提高了检测效率和准确度。此外,对于无人潜水器的移动和通信来说,由于无人潜水器是无缆控制的,相较于有缆无人潜水器,可以借用各种移动通信技术进行信息的交互,摆脱了缆线的束缚,行动灵活,不再消耗能源抵消缆线的拖拽;因为没有缆线的束缚,在获得点位规划的信息后,可以按照预设路线自主的进行航向;而且,不同于传统的无人潜水器数据传输受缆长限制,由于通过移动通信进行信息交互,通信不再受距离限制。
附图说明
11.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
12.图1是根据本技术实施例的无缆遥控无人潜水器的示例性结构体图。
13.图2是根据本技术实施例的无缆遥控无人潜水器的结构示意图。
14.图3是根据本技术实施例的水尺检测方法的流程图。
15.图4是本技术提供的一种电子设备的结构图。
具体实施方式
16.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
17.图1是根据本技术实施例的无缆遥控无人潜水器的示例性结构体图。如图1所示,无缆遥控无人潜水器包括本体和观测杆,观测杆设置在本体上侧,该观测杆可以伸缩调节其长度。在观测杆的一端,设有观测设备,该观测设备可以是摄像头或者其他能够采集图像的设备。在将无缆遥控无人潜水器驶至船只的检测点位后,通过观测设备采集船只上与水尺刻度相关的图像,在对图像进行处理后,就能获得船只的水尺刻度。此外,在进行水尺刻度检测的过程中,如果观测杆摇晃的比较厉害或者从采集的图像不能获得水尺刻度,那么就调节观测杆的长度,以缓解观测杆的摇晃或者调整观测设备的采集角度,从而自动解决测量过程出现的问题。
18.根据本技术的一个方面,提供一种无缆遥控无人潜水器。图2是根据本技术实施例
的无缆遥控无人潜水器的结构示意图。如图2所示,该无缆遥控无人潜水器包括本体、观测杆和观测杆一端的观测设备,本体包括通信装置、运动控制装置、图像采集装置和处理装置。本体还可以包括其他模块或装置,例如推进器、任务管理装置、电源管理模块、充电模块等。
19.待测船只进港后,控制中心(例如,位于岸边的控制中心)向无缆遥控无人潜水器发送命令,指示无缆遥控无人潜水器对待测船只进行水尺刻度的检测,该命令中包含待测船只的水尺点位信息。通信装置接收该水尺点位信息,并将该水尺点位信息发送至处理装置。处理装置在收到水尺点位信息后,向运动控制装置发出驶向点位指令,运动控制装置根据处理装置发出的驶向点位指令控制无缆遥控无人潜水器自主驶向该水尺点位信息指示的点位。
20.在驶至水尺点位信息指示的点位后,处理装置首先要确定观测设备当前的状态是否能够执行水尺刻度图像的采集,即观测设备是否满足观测稳定性条件。受风浪影响,当观测设备比较摇晃时,可能难以有效进行图像采集。
21.在一个具体实施例中,可以通过观测设备的线速度判断观测设备当前能否进行测量,即是否满足观测稳定性条件。处理装置首先获取观测设备的晃动线速度,在晃动线速度小于预设阈值的情况下,确定所述观测设备满足观测稳定性条件,否则,确定观测设备不满足观测稳定性条件。
22.在一个实施例中,在确定所述观测设备不满足观测稳定性条件的情况下,处理装置发出调整观测杆长度的指令,以控制观测杆调整长度。在一个具体实施例中,无缆遥控无人潜水器自带的抗流能力已经无法承受水流和/或风的冲击的情况下,控制无缆遥控无人潜水器下降,控制拉长观测杆的长度,同时保证观测设备高于水面设定的距离,例如0.3米。在上述调节后,如果观测设备仍然不满足观测稳定性条件,在保证观测设备高于水面设定的距离的前提下,处理装置控制无缆遥控无人潜水器的观测杆全部伸出,即无缆遥控无人潜水器处于最深的位置,然后逐渐缩短观测杆的长度,控制无缆遥控无人潜水器逐渐上升。在以上调节的过程中,处理装置实时判断观测设备是否满足观测稳定性条件,在不满足稳定性条件是,根据上述调节的过程继续调节。
23.在确定观测设备满足观测稳定性条件的情况下,获取观测设备采集的待测船只与水尺刻度相关的图像。然后,对该图像进行处理,识别待测船只的水尺刻度。
24.在一个具体实施例中,对图像进行处理包括:对图像自动阈值,对二值化图像进行连通域标记,对字符进行定位;然后对字符所在区域进行hog(histogram of oriented gradient,方向梯度直方图)特征提取,最后使用svm(support vector machine,支持向量机)分类算法对特征向量进行分类,获取图像中水尺刻度字符。
25.在一个实施例中,在观测设备进行采集的过程中,存在迟迟不能获得水尺刻度识别结果的情况,即无法获得识别结果。在这种情况下,需要对观测设备的采集角度进行调整,即通过调节观测杆的长度以及/或者使得无缆遥控无人潜水器上升或下降改变观测设备相对于水面的高度,从而调整采集角度。这样,在一个具体实施例中,处理装置确定识别待测船只的水尺刻度是否超时,在确定超时的情况下,发出调整观测设备角度的指令,通过调整观测设备相对于水面的高度以调节观测设备的采集角度。在一个实施例中,对于无缆遥控无人潜水器上升或下降以及观测杆的长度的调节,可以通过运动控制装置来实施。
26.在一个实施例中,除了观测设备,无缆遥控无人潜水器本体可以自带有图像采集装置,例如,可以在无缆遥控无人潜水器本体的四周均设有图像采集装置(例如,摄像头)。在观测杆的观测设备对船只进行水尺刻度采集的过程中,无缆遥控无人潜水器本体自带的图像采集装置此时位于水下,也能采集船只的水尺刻度图像,有时候该水下的图像采集装置所采集的水尺刻度图像比较清晰,可以用来作为水面观测的水尺刻度的参考,提升观测准确率。在一个具体实施例中,无缆遥控无人潜水器本体自带的图像采集装置采集的图像中可能包括多个水尺刻度,可以将图像中所有水尺刻度的中间刻度值作为图像采集装置观测到的水面下水尺刻度。
27.例如,观测杆当前的长度为0.6米,水下的图像采集装置所采集的水尺刻度图像比较清晰,显示水尺刻度为0.75米,但是由于例如波浪的影响,通过观测设备采集的图像比较模糊,不能确定识别的数字是1.3米还是1.5米,由于观测设备是高于水面的,那么所采集的水尺刻度应该稍稍小于水下的图像采集装置采集的水尺刻度与观测杆长度之和。这样,能够确定观测设备采集的水尺刻度为1.3米是更为合理的。
28.这样,在一个具体实施例中,处理装置获取通过遥控无人潜水器本体的图像采集装置采集待测船只的水面下水尺刻度形成的图像;对该图像进行处理,识别待测船只的水尺刻度;然后,对通过观测设备获得的水面水尺刻度和通过图像采集装置获得的水面下水尺刻度进行融合处理,获得融合处理后的水尺刻度。
29.根据本技术提供的用于水尺检测的无缆遥控无人潜水器,在进行水尺检测的过程中,无人潜水器只需安装观测杆就能实现自动检测,无需准备复杂的测量设备,也无需人工直接参与测量,并且能够有效减少波浪对观测设备和水尺刻度读数的干扰,通过识别水尺和水平面交接处的读数,实现自动水尺检测功能,从而在简化检测设备的同时,提高了检测效率和准确度。此外,对于无人潜水器的移动和通信来说,由于无人潜水器是无缆控制的,相较于有缆无人潜水器,可以借用各种移动通信技术进行信息的交互,摆脱了缆线的束缚,行动灵活,不再消耗能源抵消缆线的拖拽;因为没有缆线的束缚,在获得点位规划的信息后,可以按照预设路线自主的进行航向;而且,不同于传统的无人潜水器数据传输受缆长限制,由于通过移动通信进行信息交互,通信不再受距离限制。
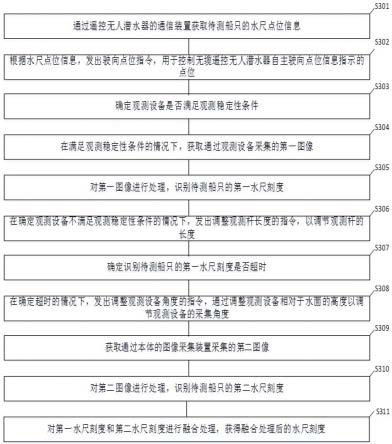
30.在图2的基础上,根据本技术的另一个方面,提供一种水尺检测方法。图3是根据本技术实施例的水尺检测方法的流程图。如图3所示,该方法包括如下步骤。
31.步骤s301,通过遥控无人潜水器的通信装置获取待测船只的水尺点位信息。
32.步骤s302,根据水尺点位信息,发出驶向点位指令,用于控制无缆遥控无人潜水器自主驶向水尺点位信息指示的点位。
33.待测船只进港后,控制中心向无缆遥控无人潜水器发送命令,指示无缆遥控无人潜水器对待测船只进行水尺刻度的检测,该命令中包含待测船只的水尺点位信息。通信装置接收该水尺点位信息,并将该水尺点位信息发送至处理装置。处理装置在收到水尺点位信息后,向运动控制装置发出驶向点位指令,运动控制装置根据处理装置发出的驶向点位指令控制无缆遥控无人潜水器自主驶向该水尺点位信息指示的点位。
34.步骤s303,确定观测设备是否满足观测稳定性条件。
35.步骤s304,在满足观测稳定性条件的情况下,获取通过观测设备采集的第一图像,所述第一图像具有待测船只的水面水尺刻度。
36.在驶至水尺点位信息指示的点位后,处理装置首先要确定观测设备当前的状态是否能够执行水尺刻度图像的采集,即观测设备是否满足观测稳定性条件。受风浪影响,当观测设备比较摇晃时,可能难以有效进行图像采集。
37.在一个具体实施例中,可以通过观测设备的线速度判断观测设备当前能否进行测量,即是否满足观测稳定性条件。处理装置首先获取观测设备的晃动线速度,在晃动线速度小于预设阈值的情况下,确定所述观测设备满足观测稳定性条件,否则,确定观测设备不满足观测稳定性条件。
38.在确定观测设备满足观测稳定性条件的情况下,获取观测设备采集的待测船只与水尺刻度相关的图像。然后,对该图像进行处理,识别待测船只的水尺刻度。
39.步骤s305,对第一图像进行处理,识别待测船只的第一水尺刻度。
40.在一个具体实施例中,对图像进行处理包括:对图像自动阈值,对二值化图像进行连通域标记,对字符进行定位;然后对字符所在区域进行hog特征提取,最后使用svm分类算法对特征向量进行分类,获取图像中水尺刻度字符。
41.步骤s306,在确定观测设备不满足观测稳定性条件的情况下,发出调整观测杆长度的指令,以调节观测杆的长度。
42.在一个实施例中,在确定所述观测设备不满足观测稳定性条件的情况下,处理装置发出调整观测杆长度的指令,以控制观测杆调整长度。在一个具体实施例中,无缆遥控无人潜水器自带的抗流能力已经无法承受水流和/或风的冲击的情况下,控制无缆遥控无人潜水器下降,控制拉长观测杆的长度,同时保证观测设备高于水面设定的距离。在上述调节后,如果观测设备仍然不满足观测稳定性条件,在保证观测设备高于水面设定的距离的前提下,处理装置控制无缆遥控无人潜水器的观测杆全部伸出,即无缆遥控无人潜水器处于最深的位置,然后逐渐缩短观测杆的长度,控制无缆遥控无人潜水器逐渐上升。在以上调节的过程中,处理装置实时判断观测设备是否满足观测稳定性条件,在不满足稳定性条件是,根据上述调节的过程继续调节。
43.步骤s307,确定识别待测船只的第一水尺刻度是否超时。
44.步骤s308,在确定超时的情况下,发出调整观测设备角度的指令,通过调整观测设备相对于水面的高度以调节观测设备的采集角度。
45.在一个实施例中,在观测设备进行采集的过程中,存在迟迟不能获得水尺刻度识别结果的情况,即无法获得识别结果。在这种情况下,需要对观测设备的采集角度进行调整,即通过调节观测杆的长度以及/或者使得无缆遥控无人潜水器上升或下降改变观测设备相对于水面的高度,从而调整采集角度。这样,在一个具体实施例中,处理装置确定识别待测船只的水尺刻度是否超时,在确定超时的情况下,发出调整观测设备角度的指令,通过调整观测设备相对于水面的高度以调节观测设备的采集角度。
46.步骤s309,获取通过本体的图像采集装置采集第二图像,所述第二图像具有待测船只的水面下水尺刻度。
47.步骤s310,对第二图像进行处理,识别待测船只的第二水尺刻度。
48.步骤s311,对第一水尺刻度和第二水尺刻度进行融合处理,获得融合处理后的水尺刻度。
49.在一个实施例中,除了观测设备,无缆遥控无人潜水器本体可以自带有图像采集
memory)、增强动态随机存取存储器edram(enhanced dynamic random access memory)、 高带宽内存hbm(high-bandwidth memory)、混合存储立方 hmc(hybrid memory cube)等等。
57.所述集成的单元/模块如果以软件程序模块的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储器中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储器中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本披露各个实施例所述方法的全部或部分步骤。而前述的存储器包括:u盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
58.本技术实施例还提供一种非瞬时性计算机存储介质,存储有计算机程序,当所述计算机程序被多个处理器执行时,使得所述处理器执行如图3所示的方法以及细化方案。
59.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的方法及其核心思想。同时,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。