技术特征:
1.一种用于测量冰形的相机标定方法,其特征在于,包括以下步骤:s10. 将标定板置于第i位姿,线激光器投射激光片光至标定板表面形成激光线,使用彩色偏振相机获取第i位姿标定板图像;其中,所述彩色偏振相机的彩色滤光片阵列为bayer格式,每个彩色滤光片叠加有h个不同方向的偏振滤光片阵列;s20. 令i=i 1,重复步骤s10,直至i=m;i=1,2,...,m;m为标定板位姿总数;s30. 去掉每个位姿标定板图像中r颜色像素和b颜色像素,用g颜色像素进行插值填充,形成每个位姿的包含g颜色和h个偏振态的统一图像;s40. 基于所有位姿的统一图像进行标定,得到相机内参矩阵,以及相机坐标系与不同位姿标定板坐标系之间的旋转矩阵和平移向量;s50. 对所有统一图像提取激光线,并解算得到所有统一图像中激光线的三维坐标;s60. 对所有统一图像中激光线的三维坐标进行平面拟合,得到激光片光的平面方程系数(a,b,c);s70. 控制线激光器旋转扫描,在每一个旋转位置重复步骤s10-s60,得到不同旋转位置的激光片光的平面方程系数,l=1,2,
…
,l;l为线激光器旋转位置,l为旋转位置总数。2.根据权利要求1所述的一种用于测量冰形的相机标定方法,其特征在于,h=4。3.根据权利要求2所述的一种用于测量冰形的相机标定方法,其特征在于,4个不同方向的偏振滤光片阵列包括0
°
、45
°
、90
°
、135
°
设置的滤光片。4.根据权利要求3所述的一种用于测量冰形的相机标定方法,其特征在于,步骤s50中,解算激光线的三维坐标的具体算法为:,其中,为第i个位姿的标定板表面激光线上第k个点在相机坐标系下的三维坐标,为该点在第i个位姿的标定板所处标定板坐标系下的三维坐标,为该点在第i个位姿标定板图像中的二维图像坐标,为比例系数,a为标定得到的相机内参矩阵,r
i
和t
i
为标定得到的相机坐标系与第i个位姿的标定板坐标系之间的
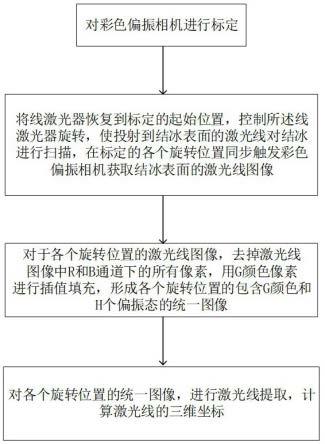
旋转矩阵和平移向量。5.根据权利要求1-4任一所述的一种用于测量冰形的相机标定方法,其特征在于,步骤s40中,采用张正友标定法进行标定;和/或步骤s50中,采用steger算法进行激光线提取;和/或步骤s60中,采用最小二乘法进行平面拟合。6.一种在线冰形测量方法,其特征在于,包括以下步骤:s100. 采用如权利要求1-5任一所述的一种用于测量冰形的相机标定方法对彩色偏振相机进行标定;s200. 将线激光器恢复到标定的起始位置,控制所述线激光器旋转,使投射到结冰表面的激光线对结冰进行扫描,在标定的各个旋转位置同步触发彩色偏振相机获取结冰表面的激光线图像;s300. 对于各个旋转位置的激光线图像,去掉激光线图像中r颜色像素和b颜色像素,用g颜色像素进行插值填充,形成各个旋转位置的包含g颜色和h个偏振态的统一图像;s400. 对各个旋转位置的统一图像,进行激光线提取,得到激光线的二维图像坐标,按下式计算激光线的三维坐标:,其中,为第l个旋转位置的激光线上第k个点在相机坐标系下的三维坐标,为该点相应的二维图像坐标,为比例系数,a为标定得到的相机内参矩阵。7.根据权利要求6所述的一种在线冰形测量方法,其特征在于,采用steger算法进行激光线提取。
技术总结
本发明涉及冰形测量技术领域,提供了一种用于测量冰形的相机标定及在线冰形测量方法,采用彩色偏振相机对结冰的三维外形进行在线测量,将拍摄的激光线图像去除R(红光)颜色像素和B(蓝光)颜色像素,保留G(绿光)颜色像素并进行插值填充,形成包含G颜色和H个偏振态的统一图像,在此基础上提取激光线,计算激光线的三维坐标,由此得到清晰的三维冰形轮廓。采用本发明的方法,能够有效提高冰形拍摄图像的清晰度,进而提高测量精度。进而提高测量精度。进而提高测量精度。
技术研发人员:左承林 马军 郭奇灵 王桥 胡家辉
受保护的技术使用者:中国空气动力研究与发展中心低速空气动力研究所
技术研发日:2022.12.05
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。