1.本发明涉及冰形测量技术领域,尤其是涉及一种用于测量冰形的相机标定及在线冰形测量方法。
背景技术:
2.研究发现,飞行过程中的结冰现象是造成飞机飞行安全的主要诱因之一。飞机不同部位的结冰会造成不同程度的影响,如机翼、机尾的结冰会导致扰流流场的改变,从而严重影响飞机的气动性能、操纵性和稳定性;发动机进气道的结冰可能导致发动机停车,危害飞行安全。因此探索结冰机理、进行结冰气象条件下飞行器空气动力性能评估、安全评估,进行防除冰等研究工作具有重要意义。为探索结冰机理、进行结冰气象条件下飞行器空气动力性能评估等研究,研究人员需要对飞行部件在不同气象环境下的结冰外形进行测量研究。获取结冰外形的途径主要有3种:数值仿真计算;飞行试验;地面模拟试验。地面模拟试验由于成本低、能够获得定量结果,是主要的获取结冰外形手段。地面模拟试验通常在结冰风洞中进行。精细化的结冰三维形状信息对提升结冰条件下飞机气动力cfd计算精度具有重要价值。因此,迫切需要可用于结冰生长过程冰形在线三维测量的方法。
3.国内外学者尝试了采用基于面结构光的三维扫描仪非接触测量方法进行冰横截面轮廓和三维形状半在线测量,但是,由于结冰表面反射系数低、透射系数高,需向结冰表面喷洒深色涂料,才能得到高对比度编码图案图像,极大地限制了该测量方法应用范围,也无法用于在线测量。
4.与投影仪投射的编码条纹相比,激光器投射的线激光具有亮度集中、图像对比度高等优点,已被广泛应用于工业三维测量领域,无需向结冰表面喷洒深色涂料也可得到较好的观测图像。一系列研究工作以及后期学者们进行的一系列探索性实验,证实了激光三角测量法在结冰模型表面轮廓测量的可行性以及相对传统冰形测量方法的优势。
5.然而,明冰的反射率在整个有记录的光谱范围内都极低,在可见光范围内,仅有不到2%的入射光在物面被反射。由于明冰的透明度高且表面光滑,线激光投射在冰体表面,多数光线投射进入冰体,只有小部分光线通过冰体表面进行反射,造成采集图像激光带区域严重扩散,表现在图像上则是一个亮斑区域,相机难以得到清晰的光条图案,导致测量精度偏低,无法准确获得冰形结构。
6.专利cn201910943972.7公开了一种基于偏振成像的冰形三维测量方法,采用偏振相机滤除散射杂光的影响,从而进行冰形三维测量。但是实践中发现,这种方法虽然能在一定程度上改善得到的光条的清晰度,但是在对明冰进行三维测量时仍然无法得到清晰的光条,仍然存在测量精度低,无法准确获得冰形结构的问题。
技术实现要素:
7.为了解决现有技术存在的不足,本技术提供一种用于测量冰形的相机标定及在线冰形测量方法,采用彩色偏振相机对结冰的三维外形进行在线测量,将拍摄的激光线图像
去除r(红光)颜色像素和b(蓝光)颜色像素,保留g(绿光)颜色像素并进行插值填充,形成包含g颜色和h个偏振态的统一图像,在此基础上提取激光线,计算激光线的三维坐标,由此得到清晰的三维冰形轮廓。
8.本技术第一方面提供用于测量冰形的相机标定方法,包括以下步骤:s10. 将标定板置于第i位姿,线激光器投射激光片光至标定板表面形成激光线,使用彩色偏振相机获取第i位姿标定板图像;其中,所述彩色偏振相机的彩色滤光片阵列为bayer格式,每个彩色滤光片叠加有h个不同方向的偏振滤光片阵列;s20. 令i=i 1,重复步骤s10,直至i=m;i=1,2,...,m;m为标定板位姿总数;s30. 去掉每个位姿标定板图像中r颜色像素和b颜色像素,用g颜色像素进行插值填充,形成每个位姿的包含g颜色和h个偏振态的统一图像;s40. 基于所有位姿的统一图像进行标定,得到相机内参矩阵,以及相机坐标系与不同位姿标定板坐标系之间的旋转矩阵和平移向量;s50. 对所有统一图像提取激光线,并解算得到所有统一图像中激光线的三维坐标;s60. 对所有统一图像中激光线的三维坐标进行平面拟合,得到激光片光的平面方程系数(a,b,c);s70. 控制线激光器旋转扫描,在每一个旋转位置重复步骤s10-s60,得到不同旋转位置的激光片光的平面方程系数,l=1,2,
…
,l;l为线激光器旋转位置,l为旋转位置总数。
9.进一步地,h=4。
10.进一步地,4个不同方向的偏振滤光片阵列包括0
°
、45
°
、90
°
、135
°
设置的滤光片。
11.进一步地,步骤s50中,解算激光线的三维坐标的具体算法为:,其中,为第i个位姿的标定板表面激光线上第k个点在相机坐标系下的三维坐标,为该点在第i个位姿的标定板所处标定板坐标系下的三维
坐标,为该点在第i个位姿标定板图像中的二维图像坐标,为比例系数,a为标定得到的相机内参矩阵,ri和ti为标定得到的相机坐标系与第i个位姿的标定板坐标系之间的旋转矩阵和平移向量。
12.进一步地,步骤s40中,采用张正友标定法进行标定;和/或步骤s50中,采用steger算法进行激光线提取;和/或步骤s60中,采用最小二乘法进行平面拟合。
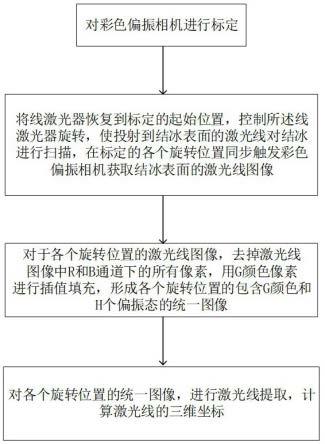
13.本技术第二方面提供一种在线冰形测量方法,包括以下步骤:s100. 采用如前所述的一种用于测量冰形的相机标定方法对彩色偏振相机进行标定;s200. 将线激光器恢复到标定的起始位置,控制所述线激光器旋转,使投射到结冰表面的激光线对结冰进行扫描,在标定的各个旋转位置同步触发彩色偏振相机获取结冰表面的激光线图像;s300. 对于各个旋转位置的激光线图像,去掉激光线图像中r颜色像素和b颜色像素,用g颜色像素进行插值填充,形成各个旋转位置的包含g颜色和h个偏振态的统一图像;s400. 对各个旋转位置的统一图像,进行激光线提取,得到激光线的二维图像坐标,按下式计算激光线的三维坐标: ,其中,为第l个旋转位置的激光线上第k个点在相机坐标系下的三维坐标,为该点相应的二维图像坐标,为比例系数,a为标定得到的相机内参矩阵。
14.采用本技术的一种用于测量冰形的相机标定及在线冰形测量方法,相对于现有技术,至少具有以下有益效果:(1)本技术中,由彩色偏振相机所拍摄的图像,将红色和蓝色的像素全部去除,只保留绿色像素进行处理,可以有效消除图像过曝光影响,提高图像的清晰度;(2)本技术利用了不同偏振态的光与冰的反作用特性,更进一步地提高所拍摄的冰的图像的清晰度;(3)本技术的方法标定一次后可以完成多次测量,在线测量简单易行,并且速度快,精度高,非常适用于对明冰和混合冰的在线冰形测量。
附图说明
15.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1是实施例1的一种用于测量冰形的相机标定方法的流程示意图;图2是实施例1的彩色偏振相机图像格式示意图;图3是实施例1中去除b通道和r通道的示意图;图4是实施例2的一种在线冰形测量方法的流程示意图。
具体实施方式
17.以下的说明提供了许多不同的实施例、或是例子,用来实施本发明的不同特征。以下特定例子所描述的元件和排列方式,仅用来精简的表达本发明,其仅作为例子,而并非用以限制本发明。
18.实施例1一种用于测量冰形的相机标定方法,如图1所示,包括以下步骤:s10. 将标定板置于第i位姿,线激光器投射激光片光至标定板表面形成激光线,使用彩色偏振相机获取第i位姿标定板图像;其中,所述彩色偏振相机的彩色滤光片阵列为bayer格式,每个彩色滤光片叠加有h个不同方向的偏振滤光片阵列;bayer格式为rggb,r为红色,红色的滤镜透过红色的波长;g为绿色,绿色的滤镜透过绿色的波长;b为蓝色,蓝色的滤镜透过蓝色的波长。本实施例中,每个彩色滤光片叠加有4个不同方向的偏振滤光片阵列,分别为0
°
、45
°
、90
°
、135
°
的偏振滤光片,形成的彩色偏振相机图像格式如图2所示。本实施例中,标定板的位姿大于等于2。
19.s20. 令i=i 1,重复步骤s10,直至i=m;i=1,2,...,m;m为标定板位姿总数;s30. 去掉每个位姿标定板图像中r颜色像素和b颜色像素,用g颜色像素进行插值填充,形成每个位姿的包含g颜色和h个偏振态的统一图像;如图3所示,直接将r和b颜色去除,留下只包含4种偏振态的g颜色的图像,然后采用常规的插值算法,将所去除了r和b的空位置填满,形成只包含了g颜色和4个偏振态的统一图像。值得说明的是,本实施例中只保留绿色,主要原因是本实施例所采用的激光器发出的激光线本身是红色,经过发明人长期试验发现,采用红色激光线拍摄的图像存在过曝的情况,而蓝色也很弱,绿色本身波段比较长,所以保留绿色;并且绿色也是人眼最为敏感的颜色。
20.s40. 基于所有位姿的统一图像进行标定,得到相机内参矩阵a,以及相机坐标系与不同位姿标定板坐标系之间的旋转矩阵ri和平移向量ti;优选采用张正友标定法进行标定,由于张正友标定法是现有技术,在此不作赘述;s50. 对所有统一图像提取激光线,并解算得到所有统一图像中激光线的三维坐标;
,其中,为第i个位姿的标定板表面激光线上第k个点在相机坐标系下的三维坐标,为该点在第i个位姿的标定板所处标定板坐标系下的三维坐标,为该点在第i个位姿标定板图像中的二维图像坐标,为比例系数;优选采用steger算法进行激光线提取,由于steger算法进行激光线提取是现有技术,在此不作赘述;s60. 对所有统一图像中激光线的三维坐标进行平面拟合,得到激光片光的平面方程系数(a, b,c),由此得到激光片光的平面方程:;s70. 控制线激光器旋转扫描,在每一个旋转位置重复步骤s10-s60,得到不同旋转位置各个通道下的激光片光的平面方程系数,l=1,2,
…
,l;l为线激光器旋转位置,l为旋转位置总数。
21.线激光器旋转过程中,可以设置初始位置,每次标定和/或测量时都从初始位置开始旋转,也可不设置初始位置,从任意旋转位置开始,直至完成所有旋转位置的标定和测量。
22.实施例2本实施例是基于实施例1的标定结果进行在线冰形测量,提供一种在线冰形测量方法,如图4所示。
23.一种在线冰形测量方法,包括以下步骤: s100. 采用如实施例1的一种用于测量冰形的相机标定方法对彩色偏振相机进行标定;s200. 将线激光器恢复到标定的起始位置,控制所述线激光器旋转,使投射到结冰表面的激光线对结冰进行扫描,在标定的各个旋转位置同步触发彩色偏振相机获取结冰
表面的激光线图像;该步骤中,线激光器从标定的初始位置开始扫描,在激光器的扫描范围内旋转,完成所有标定位置的扫描,并拍摄所有标定位置的激光线图像。
24.s300. 对于各个旋转位置的激光线图像,去掉激光线图像中r颜色像素和b颜色像素,用g颜色像素进行插值填充,形成各个旋转位置的包含g颜色和h个偏振态的统一图像。
25.s400. 对各个旋转位置的统一图像,采用steger算法进行激光线提取,得到激光线的二维图像坐标,按下式计算激光线的三维坐标: ,其中,为第l个旋转位置的激光线上第k个点在相机坐标系下的三维坐标,为该点相应的二维图像坐标,为比例系数,a为标定得到的相机内参矩阵。
26.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。