1.本发明属于船舶近岸检测技术领域,具体涉及一种多模态船舶目标检测和识别系统及装置。
背景技术:
2.在我国近海岸输油、气管道常常会因为不明船只在附近施工、作业或抛锚等危险行为而造成破坏,为了更好的保护海底管道,因而需要在沿管道附近的水域建立一套船舶检测和识别系统,检测过往船只航行状态,对危险目标进行实时预警,并把报警信息实时传送给上位机系统进行处理,以便安防管理人员快速响应报警情况,从而有效保护海底管道的安全。
3.目前,通过现有的船舶识别系统,对船舶的识别和检测范围只有在20海里范围,在预警船舶和管道位置时,在检测范围附近的船舶不能得到及时预警,进而进入管道铺设区。
4.而且很多近岸的船舶通过图像采集,其近岸环境较为复杂,在进行船舶信息核对时,需要进行很多预处理和特征分离步骤,造成了目标检测精度和识别精度的偏差。
技术实现要素:
5.本发明的目的就在于解决检测识别范围小和近岸检测的目标特征影响较多的问题,解决上述问题而提供一种结构简单,设计合理的船舶目标检测和识别系统及装置。
6.本发明通过以下技术方案来实现上述目的:一种多模态船舶目标检测和识别系统,包括数据库模块、数据可视化模块、船舶检测识别模块和数据处理模块,所述数据库模块和数据可视化模块均安装至检测点,且数据库模块和数据可视化模块组成收发机构,所述数据可视化模块、船舶检测识别模块和数据处理模块与数据库模块之间均信号连接,船舶检测识别模块设于船舶检测区域的中心位置,数据可视化模块与数据处理模块连接;船舶检测识别模块,包括sar船舶检测单元和ais船舶识别单元,sar船舶检测单元设于船舶通过的靠近检测点的近岸区域,sar船舶检测单元与检测点之间间距可调,sar船舶检测单元是基于特征检测,并在近岸多点抓拍可见光遥感图像,得到多个可见光遥感图像,利用数据处理模块对可见光遥感图像中提取目标船舶特征;ais船舶识别单元安装在船舶内,且ais船舶识别单元向数据可视化模块发射静态信息和动态信息,静态信息和动态信息用于比对和更新数据库单元中存储信息;数据库模块,用于预存储船舶信息、系统登录信息、数据可视化模块发送的船舶检测数据、数据处理模块发送的处理后数据以及船舶检测识别模块发送的识别信息和检测船舶轨迹数据;数据可视化模块,采用交互可视化操作界面,用于输入系统登录信息和显示船舶检测识别模块检测到的船舶信息和船舶轨迹数据;数据处理模块,包括特征提取单元和再检测单元,特征提取单元用于可见光遥感
图像中提取特征,并将特征共享至再检测单元,再检测单元对特征部分进行精细模糊,恢复还原对比度,并对可见光遥感图像中目标船舶实现识别;特征提取单元使用阈值二值化方法提取船舶可见光遥感图像特征,再检测单元利用卷积神经网络模型实现船舶多目标检测,并对可见光遥感图像中符合特征的船舶识别并标定。
7.作为本发明的进一步优化方案:所述ais船舶识别单元向数据可视化模块发射静态信息包括船名、呼号、船长、船宽、imo编号以及船舶类型。
8.作为本发明的进一步优化方案:所述ais船舶识别单元向数据可视化模块发射动态信息包括船位(经纬度)、航向、速度和航行状态。
9.该多模态船舶目标检测和识别系统中sar船舶检测单元,对目标船舶抓拍获取可见光遥感图像,对目标船舶抓拍获取可见光遥感图像的装置包括浮圈、海浪动力单元、防倾支架和抓拍组件,所述浮圈设于海平面上,且防倾支架呈立状安装在浮圈上,抓拍组件安装于防倾支架的顶部,且抓拍组件用于抓拍船舶的可见光遥感图像,所述海浪动力单元安装于防倾支架的下方,且海浪动力单元的末端延伸至海平面的下方,海浪动力单元利用海平面上海浪产生动力并存储;所述抓拍组件包括遥感抓拍相机、调节组件和倾角传感器,所述调节组件包括水平转动件、纵向转动件和横向转动支架,所述水平转动件设于防倾支架的顶端,纵向转动件和水平转动件之间设有连臂,连臂呈“s”型结构,横向转动支架安装于纵向转动件的末端,遥感抓拍相机安装于横向转动支架上,倾角传感器分设于水平转动件、纵向转动件和横向转动支架的内部,倾角传感器用于检测遥感抓拍相机相对于海平面的水平向、纵向和横向的偏转角度,并通过水平转动件、纵向转动件和横向转动支架补偿相对于海平面的水平向、纵向和横向的偏转角度,使遥感抓拍相机始终维持与海平面平行向抓拍。
10.作为本发明的进一步优化方案:所述浮圈与检测点之间设有绳索,检测点还设有绳索收卷机,绳索收卷机可带动绳索收放,并改变浮圈与检测点之间连接间距,浮圈可绕着以绳索收卷机为圆心的区域边缘移动。
11.作为本发明的进一步优化方案:所述横向转动支架的端部设有横向转动件,水平转动件、纵向转动件和横向转动件均包括外壳体、导磁体、固定磁极、转动支架和电磁铁,所述转动支架安装于外壳体的中部,且电磁铁分设于转动支架的外围,所述导磁体设于电磁铁的末端,固定磁极环形设于外壳体的内侧壁上,相邻固定磁极的磁极相反,导磁体和固定磁极相对设置,且电磁铁改变导磁体的磁极,使导磁体的磁极与固定磁极相同或相斥,导磁体带动转动支架绕着外壳体的中心转动调节。
12.作为本发明的进一步优化方案:所述海浪动力单元包括下潜筒、移动齿条、浮动塞和发电组件,所述下潜筒的顶端与浮筒之间固定安装,浮动塞沿着下潜筒的轴向移动,所述移动齿条垂直安装在浮动塞的上表面上,且移动齿条插接至发电组件的内部。
13.作为本发明的进一步优化方案:所述发电组件包括传动齿轮、微型发电机和安装支架,安装支架设于下潜筒的顶部,微型发电机的轴端与传动齿轮相连接,传动齿轮啮合连接于移动齿条的外壁上。
14.作为本发明的进一步优化方案:所述防倾支架上还设有风力检测器,风力检测器用于检测sar船舶检测单元所处位置的风力值。
15.作为本发明的进一步优化方案:所述防倾支架上安装有信号收发器,信号收发器与收发机构、ais船舶识别单元之间信号连接,信号收发器用于中继目标船舶和收发机构之间的信号传输。
16.本发明的有益效果在于:本发明通过sar技术和ais技术结合,可利用船舶与检测设置之间预先交换信息,得到船舶的验证信息,如果无船舶验证信息,即再通过引出一个中继的sar船舶检测单元,使其位于所保护管道的边缘处,可扩大了船舶的被检测范围,提高预警间距,sar船舶检测单元中利用“鸡头稳定原理”,对船舶进行稳定抓拍,分析其图像特征,对比船舶验证信息,信息符合即为识别成功,连接船舶警示远离;或对比库中信息,信息符合即为识别成功,联系库中所提供的联系方式,警示船舶远离,提高了近岸船舶检测、识别效率,同时有效扩大了检测和识别范围。
附图说明
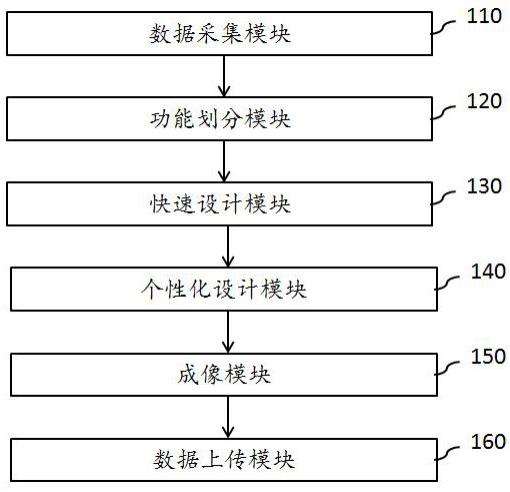
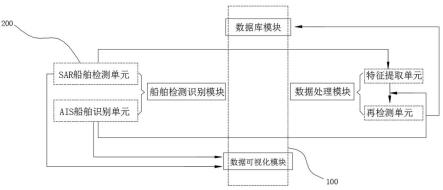
17.图1是本发明提出的一种多模态船舶目标检测和识别系统的系统流程示意图;图2是本发明提出的一种多模态船舶目标检测和识别系统的检测识别示意图;图3是本发明提出的一种多模态船舶目标检测和识别装置中sar船舶检测单元结构示意图;图4是图3的抓拍组件结构示意图;图5是图4中转动件结构示意图;图6是图3的海浪动力单元结构示意图;图7是图6的发电组件结构示意图;图8是图7中局部a的放大图。
18.图中:100、收发机构;200、sar船舶检测单元;210、浮圈;220、海浪动力单元;221、下潜筒;222、移动齿条;223、浮动塞;224、发电组件;224a、传动齿轮;224b、微型发电机;225、减震弹簧;226、安装支架;230、风力检测器;240、防倾支架;250、信号收发器;260、抓拍组件;261、水平转动件;261a、电磁铁;261b、外壳体;261c、导磁体;261d、固定磁极;261e、倾角传感器;262、连臂;263、纵向转动件;264、横向转动支架;265、遥感抓拍相机。
具体实施方式
19.下面结合附图对本技术作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本技术进行进一步的说明,不能理解为对本技术保护范围的限制,该领域的技术人员可以根据上述申请内容对本技术作出一些非本质的改进和调整。
20.实施例1参阅图1-图2所示,在本实施例中提出了一种多模态船舶目标检测和识别系统,包括数据库模块、数据可视化模块、船舶检测识别模块和数据处理模块,数据库模块和数据可视化模块均安装至检测点,且数据库模块和数据可视化模块组成收发机构100,数据可视化模块、船舶检测识别模块和数据处理模块与数据库模块之间均信号连接,船舶检测识别模块设于船舶检测区域的中心位置,数据可视化模块与数据处理模块连接;船舶检测识别模块,包括sar船舶检测单元200和ais船舶识别单元,sar船舶检测
单元200设于船舶通过的靠近检测点的近岸区域,sar船舶检测单元200与检测点之间间距可调,sar船舶检测单元200是基于特征检测,并在近岸多点抓拍可见光遥感图像,得到多个可见光遥感图像,利用数据处理模块对可见光遥感图像中提取目标船舶特征;ais船舶识别单元安装在船舶内,且ais船舶识别单元向数据可视化模块发射静态信息和动态信息,静态信息和动态信息用于比对和更新数据库单元中存储信息;数据库模块,用于预存储船舶信息、系统登录信息、数据可视化模块发送的船舶检测数据、数据处理模块发送的处理后数据以及船舶检测识别模块发送的识别信息和检测船舶轨迹数据;数据可视化模块,采用交互可视化操作界面,用于输入系统登录信息和显示船舶检测识别模块检测到的船舶信息和船舶轨迹数据;数据处理模块,包括特征提取单元和再检测单元,特征提取单元用于可见光遥感图像中提取特征,并将特征共享至再检测单元,再检测单元对特征部分进行精细模糊,恢复还原对比度,并对可见光遥感图像中目标船舶实现识别;特征提取单元使用阈值二值化方法提取船舶可见光遥感图像特征,再检测单元利用卷积神经网络模型实现船舶多目标检测,并对可见光遥感图像中符合特征的船舶识别并标定。
21.ais船舶识别单元向数据可视化模块发射静态信息包括船名、呼号、船长、船宽、imo编号以及船舶类型。
22.ais船舶识别单元向数据可视化模块发射动态信息包括船位(经纬度)、航向、速度和航行状态。
23.参阅图3-图8所示,应用于提出了一种多模态船舶目标检测和识别系统中的sar船舶检测单元200,对目标船舶抓拍获取其可见光遥感图像,对目标船舶抓拍获取可见光遥感图像的装置,具体包括:浮圈210、海浪动力单元220、防倾支架240和抓拍组件260,浮圈210设于海平面上,且防倾支架240呈立状安装在浮圈210上,抓拍组件260安装于防倾支架240的顶部,且抓拍组件260用于抓拍船舶的可见光遥感图像,海浪动力单元220安装于防倾支架240的下方,且海浪动力单元220的末端延伸至海平面的下方,海浪动力单元220利用海平面上海浪产生动力并存储;抓拍组件260包括遥感抓拍相机265、调节组件和倾角传感器261e,调节组件包括水平转动件261、纵向转动件263和横向转动支架264,水平转动件261设于防倾支架240的顶端,纵向转动件263和水平转动件261之间设有连臂262,连臂262呈“s”型结构,横向转动支架264安装于纵向转动件263的末端,遥感抓拍相机265安装于横向转动支架264上,倾角传感器261e分设于水平转动件261、纵向转动件263和横向转动支架264的内部,倾角传感器261e用于检测遥感抓拍相机265相对于海平面的水平向、纵向和横向的偏转角度,并通过水平转动件261、纵向转动件263和横向转动支架264补偿相对于海平面的水平向、纵向和横向的偏转角度,使遥感抓拍相机265始终维持与海平面平行向抓拍。
24.浮圈210与检测点之间设有绳索,检测点还设有绳索收卷机,绳索收卷机可带动绳索收放,并改变浮圈210与检测点之间连接间距,浮圈210可绕着以绳索收卷机为圆心的区域边缘移动。
25.横向转动支架264的端部设有横向转动件,水平转动件261、纵向转动件263和横向
转动件均包括外壳体261b、导磁体261c、固定磁极261d、转动支架和电磁铁261a,转动支架安装于外壳体261b的中部,且电磁铁261a分设于转动支架的外围,导磁体261c设于电磁铁261a的末端,固定磁极261d设于外壳体261b的内侧壁上,导磁体261c和固定磁极261d相对设置,且电磁铁261a改变导磁体261c的磁极,使导磁体261c的磁极与固定磁极261d相同或相斥,导磁体261c带动转动支架绕着外壳体261b的中心转动调节。
26.海浪动力单元220包括下潜筒221、移动齿条222、浮动塞223和发电组件224,下潜筒221的顶端与浮筒之间固定安装,浮动塞223沿着下潜筒221的轴向移动,移动齿条222垂直安装在浮动塞223的上表面上,且移动齿条222插接至发电组件224的内部。
27.需要补充说明的是,在移动齿条222和浮动塞223的连接处设有减震弹簧225,减震弹簧225用于过滤下潜筒221的端面和浮动塞223的上端面之间抵靠时产生的振动;发电组件224包括传动齿轮224a、微型发电机224b和安装支架226,安装支架226设于下潜筒221的顶部,微型发电机224b的轴端与传动齿轮224a相连接,传动齿轮224a啮合连接于移动齿条222的外壁上。
28.防倾支架240上还设有风力检测器230,风力检测器230用于检测sar船舶检测单元200所处位置的风力值。
29.防倾支架240上安装有信号收发器250,信号收发器250与收发机构100、ais船舶识别单元之间信号连接,信号收发器250用于中继目标船舶和收发机构100之间的信号传输。
30.需要说明的是,该一种多模态船舶目标检测和识别系统及装置,在使用时,具体的检测、识别流程如下:一、使用时,sar船舶检测单元200需要通过释放至检测点的近岸范围的海面上,其起到中继和抓拍作用;其抓拍过程:遥感抓拍相机265利用水平转动件261、纵向转动件263和横向转动件调节,始终维持平行于海平面的抓拍向采像,其中水平转动件261、纵向转动件263和横向转动件三者调节通过磁极转换,即如果需要向一侧进行转动,则将与相邻固定磁极261d之间相近的导磁体261c改变为相同磁极,使其带动转动支架向相同磁极的一侧偏转,其中变化通过电磁铁261a的电流方向改变,进而实现了磁极转化,该遥感抓拍相机265的调节采用到“鸡头稳定原理”,保持了该抓拍相机的图像始终水平,便于后期特征比对和筛选;其中在浮圈210底侧的海浪动力单元220作业时,海浪通过下潜筒221进入,海浪波动进而带动浮动塞223沿着下潜筒221的轴向上下移动,其上移动齿条222移动,带动安装支架上的传动齿轮224a转动,即传动齿轮224a带动微型发电机224b的末端所连接的齿轮,带动微型发电机224b的动作,微型发电机224b通过导线连接有蓄电池,蓄电池存储海浪动力单元220所产出的电力,提供浮圈210上设备的用电;二、在船舶经过时,sar船舶检测单元200对其进行抓拍,抓拍间隔为1-2s之间,得到一组可见光遥感图像,其中可见光遥感图像中船舶经过近岸时,通过自身的ais船舶识别单元,向sar船舶检测单元200发射静态信息和动态信息,即可见光遥感图像所拍摄到的船舶中基本信息,并对其信息检测,船舶特征识别;三、获取到船舶可见光遥感图像后,对其进行预处理和海陆分离后,使用特征提取单元对其实施连通区域标记和转化,再使用阈值二值化方法提取船舶可见光遥感图像特征,其详细步骤如下:
步骤1:设定船舶可见光遥感图像边缘分割点阈值t0;步骤2:依据阈值t0对船舶可见光遥感图像小波变换的极大值进行判断,当该极大值大于t0时,则将船舶可见光遥感图像的像素点设置为1,反之设置为0;步骤3:对数值为1的船舶可见光遥感图像像素点进行叠加并归一化处理,得到船舶可见光遥感图像的边缘点e0,重复上述步骤,将所有的船舶可见光遥感图像边缘点,对可见光遥感图像边缘点进行连接,即得到其图像特征。
31.接着利用卷积神经网络模型实现图像中船舶多目标检测,具体的操作步骤如下:卷积神经网络模型由5个卷积层、3
×
3卷积操作、2层池化层和两层全连接层构成,将船舶可见光遥感图像特征输入到卷积神经网络模型内后,其经过5次卷积操作和3
×
3次卷积映射后被输入至池化层。
32.池化层对船舶的可见光遥感图像特征进行合并后,将其传输到全连接层内;全连接层将船舶可见光遥感图像特征映射到其样本标记空间内,并利用分类其输出检测可见光遥感图像识别结果,该结果记为检测多目标检测结果。
33.使用卷积神经网络模型检测船舶多目标时,池化层需对船舶可见光遥感图像特征向量实施尺度转换处理,其表达公式如下:(1)式(1)中:表示初始船舶可见光遥感图像特征向量;表示尺度变换后的船舶可见光遥感图像特征向量;d表示像素点距离;i表示第i个像特征向量;表示第i个船舶可见光遥感图像特征向量。
34.依据公式(1)结果,卷积神经网络模型输出的船舶多目标检测结果表达式如下:(2)式中,yi表示目标结果,其中ζi表示尺度因子,表示第i个船舶可见光遥感图像特征向量。
35.按照上述步骤,利用式(2)对卷积神经网络模型进行迁移迭代,即可实现图像中的船舶多目标检测。
36.四、目标检测后,可得到由ais船舶识别单元的动态信息、静态信息,sar船舶检测单元200检测得到的船舶实际特征,将其数据打包通过信号收发器250再传递至收发机构100,收发机构100中数据可视化模块可显示船舶检测识别模块检测到的船舶信息和船舶轨迹数据,进而比对数据库模块中预存储船舶信息、以及静态信息和动态信息中数据,对比数据契合度,契合度达标后,将其数据打包再输入至数据库模块中,更新储船舶信息和被检测船舶的轨迹数据。
37.上面结合附图对本实施例的实施例进行了描述,但是本实施例并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实施例的启示下,在不脱离本实施例宗旨和权利要求所保护的范围情况下,还可
做出很多形式,均属于本实施例的保护之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。