1.本发明涉及建筑工程技术领域,尤其涉及一种建筑工程预制楼板装配用精细化调节装置。
背景技术:
2.装配式建筑是智能化建筑工程中常见的一种建筑形式,其主要是把传统建造方式中的大量现场作业工作转移到工厂进行,在工厂加工制作好建筑用构件和配件(如预制柱、楼板、墙板、等),运输到建筑施工现场,再通过可靠的连接方式在现场装配安装。
3.为了精确化的掌握预制构件在施工现场的安装对接,经检索,中国专利号cn 113090045 b公开了一种智能化建筑工程用装配精细化调节装置,包括底座,所述底座的内部固定连接有电机一,所述电机一的输出端固定连接有齿轮一,所述底座顶面的中部转动连接有螺纹杆一,所述底座顶面的一端活动卡接有导向杆,所述螺纹杆一与导向杆之间设置有承接板,所述承接板的顶面固定连接有助推机构。
4.然而现有技术还存在如下不足:现有装配精细化调节装置并不适用于预制楼板在施工现场安装节点的安装调节,预制楼板在装配时依然需要配合施工人员进行手动扶正调节对接安装,该操作过程速度慢,且精确度不易掌握,同时还增加操作时人员伤害的风险,因此本发明在此提出一种建筑工程预制楼板装配用精细化调节装置。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种建筑工程预制楼板装配用精细化调节装置。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种建筑工程预制楼板装配用精细化调节装置,包括定位单元和吊装调节单元,所述定位单元与吊装调节单元相互配合使用;
8.所述定位单元包括2-4个底座,每个底座均设有连接机构,连接机构用于将底座固定,每个底座的上侧均垂直安装有多个导向柱;
9.所述吊装调节单元包括与吊索安装的框架,所述框架的下侧设有抓持机构,抓持机构用于夹持楼板;
10.所述框架的四周对称设有伸缩臂,伸缩臂与框架通过第一旋转机构连接,第一旋转机构用于调节伸缩臂相对于框架的竖向角度;
11.所述伸缩臂的长度通过伸缩机构调节,伸缩臂远离框架的一侧安装有u型架,u型架远离伸缩臂的一侧安装有定位套,定位套与导向柱一一对应,u型架上设有第二旋转机构,第二旋转机构用于调节定位套相对于u型架的竖向角度。
12.进一步地,所述定位单元包括2个底座,每个底座两端的上侧均设有一个连接机构,底座安装在梁钢筋主体上,并通过连接机构进行定位;
13.所述连接机构包括与底座顶面固定的固定板,固定板远离底座端部的一侧转动安
装有丝杆,同时丝杆上螺纹安装有u型滑架,且u型滑架滑动贯穿固定板,u型滑架的端部向底座的端部延伸,且安装有两个l型连接扣,底座的端部开设有导向槽,l型连接扣的下端穿过导向槽并延伸至梁钢筋主体的内侧,梁钢筋主体包括主筋和箍筋,l型连接扣的下端位于上侧的主筋之间,且扣住箍筋的上部。
14.进一步地,所述抓持机构包括对称固定在框架下侧的两组导向架,两组导向架均包括两个支撑板,两个支撑板之间共同安装有双向丝杆和导向滑杆,双向丝杆上对称螺纹安装有两个移动爪,且两个移动爪还与导向滑杆滑动连接,双向丝杆在转动时,控制两个移动爪相互靠近或者远离,移动爪用于勾住楼板顶面预留的外露钢筋。
15.进一步地,所述伸缩臂包括两个方管,两个方管远离框架的一端通过连接板连接为一体,方管分别滑动安装有齿条板;
16.所述第一旋转机构包括与框架上侧转动安装的第一转轴,两个方管靠近框架的一端均与第一转轴固定安装,框架上安装有第一电机,第一电机的驱动轴安装有第一蜗杆,第一转轴上安装有第一蜗轮,第一蜗杆与第一蜗轮啮合传动,第一电机运行时控制伸缩臂相对于框架实现竖向角度调节;
17.所述伸缩机构包括与连接板转动安装的第二转轴和轴杆,第二转轴的一端与第二电机的驱动轴连接,第二转轴上安装有第二蜗杆,轴杆的一端安装有第二蜗轮,轴杆的另一端安装有齿轮,第二蜗杆与第二蜗轮啮合传动,齿轮与齿条板啮合传动,第二电机运行时控制齿条板相对于方管伸缩。
18.进一步地,所述定位套包括连接为一体的套管和u型扣;
19.所述第二旋转机构包括与u型架转动安装的第三转轴,第二转轴的一端安装有第三蜗轮,所述u型架靠近第三蜗轮的一侧安装有第三电机,第三电机的驱动轴上安装有第三蜗杆,第三蜗杆与第三蜗轮啮合传动,第三电机运行时控制定位套相对于u型座实现竖向角度调节。
20.进一步地,所述u型扣的内壁转动安装有第一定位辊和第二定位辊,第一定位辊和第二定位辊均设有两个,两个第二定位辊相对于套管垂直且平行设置在同一水平面内,两个第一定位辊相对于套管平行且上下平行设置在同一竖直面内,其中一个第一定位辊位于两个第二定位辊的上侧,另一个第一定位辊位于两个第二定位辊的下侧。
21.进一步地,所述双向丝杆有两个,且两个双向丝杆同时与一个传动轴传动,传动轴转动安装在框架的一侧,传动轴上安装有伞齿轮,双向丝杆的端部同样安装有伞齿轮,传动轴安装的伞齿轮与双向丝杆安装的伞齿轮相互啮合,传动轴的一端还安装有操作柄。
22.进一步地,所述框架靠近方管端部的位置处开设有与方管相对应的凹槽。
23.相比于现有技术,本发明的有益效果在于:
24.1、本发明中设置相互配合的定位单元和吊装调节单元,定位单元与梁钢筋主体连接,吊装调节单元可将楼板夹持吊装,然后在与定位单元的配合下将楼板稳定的转运至装配部位,吊装调节单元可便捷且精确的调节楼板相对于装配部位的位置,操作过程快速高效,且无需人员手动扶持,精确度便于掌握,同时可避免在装配时造成人员伤害。
25.2、本发明中,吊装调节单元包括框架、抓持机构、伸缩臂、定位套等构件,其中抓持机构可对楼板实现快速稳定的夹持,然后配合吊装设备将楼板吊装转移至建筑的装配部位,在转移至装配部位的过程中,伸缩臂和伸缩长度,将定位套与定位单元中的导向柱对
接,定位套的位置和角度在伸缩臂的伸缩调节、伸缩臂的角度调节以及定位套自身的角度调节下实现精准调节,从而可与导向柱高效的对接,同时又可以在装配楼板的过程中,调节楼板相对于装配部位的位置,即实现楼板的精确高效调整,使其更快速精准的进行装配。
26.综上所述,本发明设置相互配合的定位单元和吊装调节单元,同时配合吊装设备可将楼板吊起后,实现高效便捷且精准的装配,无需人员手动扶持,并可避免人员意外伤害。
附图说明
27.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
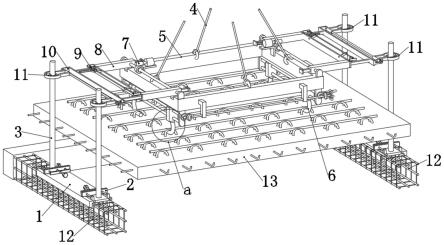
28.图1为本发明的整体结构示意图;
29.图2为图1中a部分结构的放大图;
30.图3为底座、连接机构在梁钢筋主体上的安装示意图;
31.图4为连接机构与梁钢筋主体的安装详图;
32.图5为连接机构的结构示意图;
33.图6为抓持机构在框架下侧的安装示意图;
34.图7为伸缩臂、u型架、定位套在框架一侧的安装示意图;
35.图8为伸缩臂、u型架、定位套的连接示意图;
36.图9为图8中b部分结构的放大图;
37.图10为图8中c部分结构的放大图;
38.图11为定位套的结构示意图。
39.图中:1底座、101导向槽、2连接机构、21固定板、22u型滑架、23丝杆、24l型连接扣、3导向柱、4吊索、5框架、6抓持机构、61移动爪、62双向丝杆、63传动轴、64伞齿轮、65操作柄、7第一旋转机构、71第一转轴、72第一电机、73第一蜗杆、74第一蜗轮、8伸缩臂、81方管、82齿条板、83连接板、9伸缩机构、91第二转轴、92第二电机、93第二蜗杆、94第二蜗轮、95轴杆、96齿轮、10u型架、100第二旋转机构、1001第三转轴、1002第三电机、1003第三蜗杆、1004第三蜗轮、11定位套、111套管、112u型扣、113第一定位辊、114第二定位辊、12梁钢筋主体、121主筋、122箍筋、13楼板、14外露钢筋。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;
41.参照图1-11,一种建筑工程预制楼板装配用精细化调节装置,包括定位单元和吊装调节单元,定位单元与吊装调节单元相互配合使用;吊装调节单元还与吊装设备配合,通过吊装设备起吊;
42.定位单元包括2-4个底座1,每个底座1均设有连接机构2,连接机构2用于将底座1固定,每个底座1的上侧均垂直安装有多个导向柱3;
43.如图1所示,本实施例中,定位单元包括2个底座1,每个底座1两端的上侧均设有一个连接机构2,底座1安装在梁钢筋主体12上,并通过连接机构2进行定位;
44.连接机构2包括与底座1顶面固定的固定板21,固定板21远离底座1端部的一侧转动安装有丝杆23,同时丝杆23上螺纹安装有u型滑架22,且u型滑架22滑动贯穿固定板21,u型滑架22的端部向底座1的端部延伸,且安装有两个l型连接扣24,底座1的端部开设有导向槽101,l型连接扣24的下端穿过导向槽101并延伸至梁钢筋主体12的内侧,梁钢筋主体12包括主筋121和箍筋122,l型连接扣24的下端位于上侧的主筋121之间,且扣住箍筋122的上部。
45.如图3-4所示,定位单元的每个底座1均利用其两端设置的连接机构2与梁钢筋主体12连接固定,在连接时,通过转动丝杆23即可控制u型滑架22相对于固定板21滑动,同时利用u型滑架22端部的两个l型连接扣24扣住箍筋122的上部,从而实现底座1在梁钢筋主体12上的安装固定,并未导向柱3提供稳定的定位,使其相对于梁钢筋主体12保持垂直状态。
46.吊装调节单元包括与吊索4安装的框架5,框架5的下侧设有抓持机构6,抓持机构6用于夹持楼板13;
47.框架5的四周对称设有伸缩臂8,伸缩臂8与框架5通过第一旋转机构7连接,第一旋转机构7用于调节伸缩臂8相对于框架5的竖向角度;
48.伸缩臂8的长度通过伸缩机构9调节,伸缩臂8远离框架5的一侧安装有u型架10,u型架10远离伸缩臂8的一侧安装有定位套11,定位套11与导向柱3一一对应,u型架10上设有第二旋转机构100,第二旋转机构100用于调节定位套11相对于u型架10的竖向角度。
49.如图1、2和6所示,本实施例中,抓持机构6包括对称固定在框架5下侧的两组导向架,两组导向架均包括两个支撑板,两个支撑板之间共同安装有双向丝杆62和导向滑杆,双向丝杆62上对称螺纹安装有两个移动爪61,且两个移动爪61还与导向滑杆滑动连接,双向丝杆62在转动时,控制两个移动爪61相互靠近或者远离,移动爪61用于勾住楼板13顶面预留的外露钢筋14。
50.如图6所示,双向丝杆62有两个,且两个双向丝杆62同时与一个传动轴63传动,传动轴63转动安装在框架5的一侧,传动轴63上安装有伞齿轮64,双向丝杆62的端部同样安装有伞齿轮64,传动轴63安装的伞齿轮64与双向丝杆62安装的伞齿轮64相互啮合,传动轴63的一端还安装有操作柄65。
51.转动操作柄65即可控制传动轴63转动,再通过传动轴63安装的伞齿轮64与双向丝杆62安装的伞齿轮64相互啮合,即可控制两个双向丝杆62同时转动,双向丝杆62转动时即可控制其各自安装的两个移动爪61相互靠近或者远离,如图2所示,在移动爪61相互靠近时,可使其勾住楼板13顶面预留的外露钢筋14,进而实现对楼板13的夹持。
52.利用吊装设备和吊索4对框架5起吊,并且利用抓持机构6对楼板13进行夹持,利用吊装设备起吊框架5和楼板13,并将定位套11与导向柱3对接,使其套在导向柱3的外侧,并在下落时可使其沿着导向柱3向下运动,通过导向柱3对整个吊装调节单元提供竖向定位导向。
53.在楼板13下降的过程中,通过调节伸缩臂8的长度、角度,以及调节定位套11的角度,可综合调节楼板13相对于建筑装配部位的位置,无需人工手动扶持摆正楼板13,从而可避免人工扶正造成意外伤害。
54.本实施例中,伸缩臂8包括两个方管81,两个方管81远离框架5的一端通过连接板83连接为一体,方管81分别滑动安装有齿条板82;
55.伸缩臂8的角度通过第一旋转机构7进行调整,使其可相对于框架5实现竖向角度调节;第一旋转机构7包括与框架5上侧转动安装的第一转轴71,两个方管81靠近框架5的一端均与第一转轴71固定安装,框架5上安装有第一电机72,第一电机72的驱动轴安装有第一蜗杆73,第一转轴71上安装有第一蜗轮74,第一蜗杆73与第一蜗轮74啮合传动,第一电机72运行时控制伸缩臂8相对于框架5实现竖向角度调节;框架5靠近方管81端部的位置处开设有与方管81相对应的凹槽。
56.伸缩臂8的长度通过伸缩机构9进行调节,伸缩臂8的伸缩可带动定位套11同步运动;伸缩机构9包括与连接板83转动安装的第二转轴91和轴杆95,第二转轴91的一端与第二电机92的驱动轴连接,第二转轴91上安装有第二蜗杆93,轴杆95的一端安装有第二蜗轮94,轴杆95的另一端安装有齿轮96,第二蜗杆93与第二蜗轮94啮合传动,齿轮96与齿条板82啮合传动,第二电机92运行时控制齿条板82相对于方管81伸缩。
57.定位套11包括连接为一体的套管111和u型扣112;其中,u型扣112的内壁转动安装有第一定位辊113和第二定位辊114,第一定位辊113和第二定位辊114均设有两个,两个第二定位辊114相对于套管111垂直且平行设置在同一水平面内,两个第一定位辊113相对于套管111平行且上下平行设置在同一竖直面内,其中一个第一定位辊113位于两个第二定位辊114的上侧,另一个第一定位辊113位于两个第二定位辊114的下侧。第一定位辊113和第二定位辊114的设置可增加定位套11整体沿着导向柱3上下滑动时的顺畅性和稳定性,降低运动时的阻力。
58.第二旋转机构100包括与u型架10转动安装的第三转轴1001,第二转轴1001的一端安装有第三蜗轮1004,u型架10靠近第三蜗轮1004的一侧安装有第三电机1002,第三电机1002的驱动轴上安装有第三蜗杆1003,第三蜗杆1003与第三蜗轮1004啮合传动,第三电机1002运行时控制定位套11相对于u型座10实现竖向角度调节。
59.通过伸缩臂8的角度调节、长度调节,以及定位套11整体的角度调整,可更加方便高效的使定位套11在与导向柱3对接,并且在下移楼板13装配的过程中,可便捷稳定且精准的调整楼板13相对于装配部位的位置,使其精确的落在装配部位,装配过程更加高效。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。