1.本实用新型涉及传感器技术领域,尤其涉及一种柔性传感器。
背景技术:
2.目前,现有爬壁机器人多数只能攀爬平面或者固定曲率的表面,针对爬壁机器人变曲率曲面顺应的研究并不多见,大多通过结构被动地顺应曲面变化,例如,采用磁吸附的爬壁机器人可以利用履带结构获取一定程度的曲面变化顺应能力。但通过机构被动顺位曲面,缺乏预判与主动调控能力,且可顺应曲率变化范围较小。
3.另外,接触传感器可利用可感知力/力矩的柔性接触传感器来获得接触曲面的法向信息是一大研究热点,但多数研究者所研究的柔性触觉传感器通常仅可感知三维力信息,如何实现柔性接触传感器的六维力感知,进而利用此信息计算得到接触曲面的法线方向是一大研究难点。
技术实现要素:
4.本实用新型提供了一种柔性传感器,以解决现有技术中接触传感器无法顺应变曲率曲面,并对接触曲面的实时法向感知的技术问题。
5.为解决上述问题,本实用新型提供一种柔性传感器,所述柔性传感器包括柔性基底和应变片,
6.所述应变片以圆形阵列方式均匀分布于所述柔性基底的底平面上,且相邻所述应变片处于不同姿态,以实现对所述柔性传感器各方向变形的响应;
7.还包括与所述应变片电性连接的数据采集电路,当柔性传感器吸附在不同曲面时,所述应变片随接触曲面的弯曲曲率弯曲,并且所述应变片的电阻发生变化,所述数据采集电路用于测量所述柔性传感器的应变片的电阻值ri。
8.优选的,所述柔性基底由柔性材料浇铸形成,所述应变片内嵌在所述柔性基底上。
9.优选的,所述柔性基底设置为半球体形,且半球体形的直径为48-52mm。
10.优选的,所述应变片的数量为至少6片,且所述应变片距离所述柔性基底的半球平面的高度为7-9mm。
11.优选的,所述柔性基底由ecoflex材料浇铸而成。
12.本实用新型与现有技术相比具有显著的优点和有益效果,具体体现在以下方面:
13.通过柔性基底实现对接触表面的紧密贴合,利用内嵌应变片实现对接触位置所受的六维力进行感知,内嵌应变片具有一定的顺应能力,可适应柔性传感器贴合曲面时的变形,通过测量其输出电阻的变化以获取接触处的力/力矩信息,再对此感测信息进行处理获得接触位置的法向信息。当柔性传感器吸附不同在不同曲面时,应变片可以随接触曲面的弯曲曲率弯曲,随之应变片电阻发生变化。本实用新型中的柔性传感器能够顺应不平整的接触曲面,同时其可以实现对接触曲面的实时法向感知,可用于实现曲面匹配与对齐,顺应变曲率曲面。
附图说明
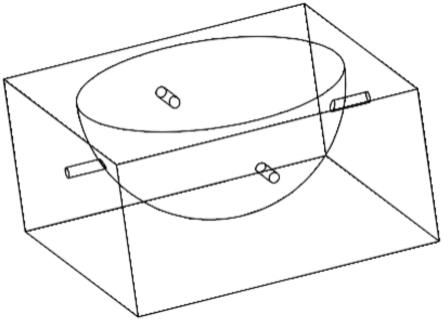
14.图1是本实用新型实施例中柔性传感器制备过程中所需模具的示意图;
15.图2是本实用新型实施例中具有曲面法线方向感知能力的柔性六维力传感器的示意图;
16.图3是本实用新型实施例中接触曲面法线通过计算过程中柔性传感器受力情况的示意图。
17.附图标记说明:
18.1-柔性基底;2-应变片。
具体实施方式
19.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
20.如图1-3所示,本实用新型实施例中提供了一种柔性传感器,它具有曲面法线方向感知能力,所述柔性传感器包括柔性基底1、应变片2和数据采集电路,其中:
21.柔性基底1由柔性材料浇铸形成,用于保证柔性传感器可被动顺应接触表面,实现对接触表面的紧密贴合;同时,柔性材料还可起到保护应变片2的作用。
22.应变片2以圆形阵列方式垂直均匀内嵌于柔性基底1上,且相邻应变片2处于不同姿态,以实现对柔性传感器各方向变形的响应。
23.数据采集电路与应变片2电性连接,当柔性传感器吸附在不同曲面时,应变片2可随接触曲面的弯曲曲率弯曲,并且应变片2的电阻发生变化,此时数据采集电路用于测量柔性传感器的应变片2的电阻值ri。
24.需要进一步说明的是,请参考如图1所示,应变片2在柔性基底1进行浇铸之前,采取按设计的布局方式固定于模具的相应位置,在柔性传感器的柔性基底1高温凝固过程中,及时调整应变片2的位置,以保证其处于理想位置,从而实现应变片2的内嵌。
25.具体地,在本实用新型的实施例当中,柔性基底1由柔性材料浇铸形成,应变片2内嵌在柔性基底1上。
26.具体地,请参阅图1所示,在本实用新型的实施例当中,柔性基底1设置为半球体形,且半球体形的直径为48-52mm。作为本实用新型实施例中的最佳优选方式,半球体形的直径为50mm。
27.由此,柔性传感器为直径等于50mm的半球体形,这样既可保证传感器紧密贴合任意形状的接触面,半球型又能将柔性传感器所受外力更好地传递至内嵌设置对的应变片2上,保证其感知柔性传感器的受力变形情况,该尺寸可根据实际应用情况进行调整。
28.需要进一步说明的是,上述浇注柔性基底1的材料包括但不限于ecoflex材料,ecoflex材料是一款化石基生物可降解和可堆肥塑料,为很多生物可降解和生物基塑料的重要基础原料。
29.请参阅图2所示,在本实用新型的实施例当中,应变片2以圆形阵列方式内嵌于柔性基底1上,应变片2的数量为至少6片,且应变片2距离柔性基底1的半球平面的高度为7-9mm。
30.由此,柔性传感器包含6片或以上应变片2,作为本实用新型实施例中的最佳优选
方式,应变片2选取为bhf2k-3aa型号,从而实现对六维力的感知。
31.另外,在本实用新型的实施例当中,应变片2距离柔性基底1的半球平面约8mm,相邻的应变片2以不同姿态内嵌于柔性基底1(平行或垂直于柔性基底1的半球平面),从而保证柔性传感器可实现对各方向所受力导致的变形的响应。
32.需要说明的是,在本实施例中所设计的柔性传感器,柔性传感器使用之前需要先进行标定,所述标定过程如下:
33.构建六输入、六输出的神经网络模型,神经网络模型以柔性传感器的应变片2输出的电阻变化作为输入变量,以柔性传感器的柔性基底1的半球底面中心处所受六维力作为输出变量;
34.采集至少包括1000组应变片2输出的电阻变化和柔性基底1的半球底面中心处所受六维力作为相对应的输入、输出数据,形成标定样本数据集;
35.利用所述标定样本数据集对神经网络模型进行训练,确定神经网络的各个参数,以得到确定的神经网络模型;
36.建立应变片2的电阻变化与柔性基底1的半球底面中心所受六维力之间的对应映射关系,完成所述柔性传感器的标定。
37.需要说明的是,在本实用新型的实施例当中构建六输入六输出的神经网络模型,所述神经网络模型包括但不限于psobp神经网络模型,通过上述标定方法对柔性传感器进行标定后,通过测量所得柔性传感器的应变片2的电阻,即可利用训练所得的神经网络模型预测获得所述柔性传感器半球底面中心处所受的六维力。
38.在本实用新型的实施例当中所述的柔性传感器用于测量接触曲面的法线方向,测量过程如下:
39.当柔性传感器与曲面接触并受力发生形变时,通过数据采集电路测得所述柔性传感器的应变片电阻值ri;
40.根据所述柔性传感器的半球底面中心处所受的六维力与应变片阻值ri之间所建立的函数关系,计算得到所述柔性传感器的半球底面中心处所受六维力信息;
41.利用所测六维力信息,计算得到接触曲面接触处的法线方向。
42.具体计算过程如下:
43.当接触曲面曲率半径大于柔性传感器(半径为r)的曲率半径时,接触面采用平面近似(未施加力时为平面α1,施加力后平面移动至α2),未受力时接触点为p,受力f后柔性传感器发生变形接触点移动至h点,其中f可分解为f
x
、fy、fz。采用如下公式可反解得到θ。
[0044][0045][0046]
rh=rsinθ-d
t
cosθ
[0047]
其中,fz为传感器半球底面法线方向所受合力,fr为f
x
与fy的合力(即水平面上所受合力,fr的方向为r轴),rh为h点在r轴上的坐标值;θ为接触面法线方向与本实用新型所述柔性传感器的半球底面法线方向之间夹角,dn为柔性传感器沿接触面的法向变形(垂直于面α1、α2),d
t
为切向变形(平行于面α1、α2),e为柔性传感器杨氏模量。
[0048]
利用有限元仿真模拟柔性传感器不同受力变形情况。
[0049]
具体而言,即通过改变柔性传感器的变形程度dn和d
t
,模拟不同受力情况,进而获得共1000组相对应的传感器半球底面中心处所受六维力和接触点h在r轴上的坐标rh。
[0050]
将该1000组数据作为训练样本数据集,利用神经网络对其进行学习,可拟合得到关系式:
[0051]
通过有限元仿真及神经网络算法,拟合实现利用所测传感器半球底面中心处六维力信息,计算得到h点在r轴上的坐标:
[0052][0053][0054]
rh=g(f
x
,fy,fz,m
x
,my,mz)=rsinθ-d
t
cosθ
[0055]
综上,利用所测得的六维力信息(转换为fz、fr和rh),即可计算得到接触面法线方向与本实用新型所述柔性传感器的半球底面法线方向之间夹角θ,实现对接触曲面法线方向的测量。
[0056]
虽然本实用新型公开披露如上,但本实用新型公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。