技术特征:
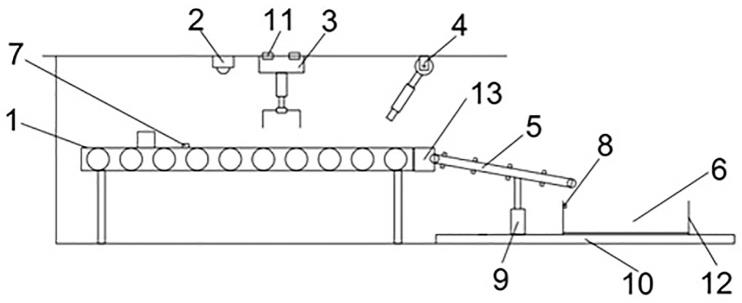
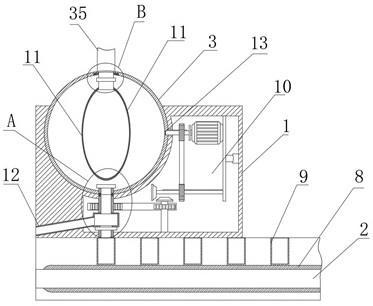
1.一种无缝钢管落料系统,其特征在于,包括:传送带,其用以运输钢管,其上设置有重力传感器,以检测钢管的重力;摄影装置,其设置在所述传送带上方,以对所述钢管进行拍摄;调整装置,其设置在所述传送带上方的移动滑轨上,其包括伸缩杆以及通过活动轴设置在所述伸缩杆末端的夹持臂,以使所述夹持臂绕所述伸缩杆转动;拨动装置,其设置在所述传送带末端,其包括固定轴以及与所述固定轴活动连接的能伸缩的摆动臂,以使所述摆动臂绕所述固定轴摆动;下料装置,其设置在所述传送带末端,其包括斜板以及所述斜板两侧的斜板传送带,各所述斜板传送带上间隔设置有若干挡板,以使所述挡板承接钢管沿所述斜板下滑,所述斜板的下方还设置有升降柱,以控制所述斜板的倾斜角度;收纳装置,其设置在所述斜板的末端,其包括收纳箱以及收纳箱底部的移动轨道,以使所述收纳箱在所述移动轨道上移动,所述收纳箱两侧分别设置有距离传感器,以检测所述收纳箱中钢管与所述距离传感器间的距离;中控处理器,其与所述传送带、摄影装置、调整装置、拨动装置、下料装置以及收纳装置分别连接,用以获取摄影装置拍摄的图像,确定图像中的钢管轮廓并计算偏转特征参量,以根据所述偏转特征参量判定是否控制所述调整装置调整钢管的角度并确定所述夹持臂的转动角度以及转动方向,在钢管运输至传送带末端时,根据钢管轮廓的宽度以及高度对摆动臂的摆动角度以及伸长长度进行调整,根据重力传感器检测的重力计算下滑特征参量对所述斜板的倾斜角度以及斜板传送带的传送速度进行调整,根据钢管轮廓的宽度对收纳箱的移动速度进行调整。2.根据权利要求1所述的无缝钢管落料系统,其特征在于,所述中控处理器包括角度矫正单元,其用以提取所述图像中钢管的钢管轮廓,根据所述钢管轮廓计算偏转特征参量c,其中,所述角度矫正单元以所述钢管轮廓的中心为原点,以垂直于所述传送带的传送方向为x轴,以平行于所述传送带的传送方向为y轴建立直角坐标系,确定所述钢管轮廓与所述x轴的夹角|az|,|az|≤90
°
,根据所述夹角按照公式(1)计算偏转特征参量c,设定c=(1),公式(1)中,az0表示预设标准夹角对比参量。3.根据权利要求2所述的无缝钢管落料系统,其特征在于,所述角度矫正单元将所述偏转特征参量c与预设标准偏转特征对比参量c0进行对比,根据对比结果判定是否控制所述调整装置调整所述钢管的角度,其中,当c≥c0时,所述角度矫正单元判定需控制所述调整装置调整所述钢管的角度;当c<c0时,所述角度矫正单元判定无需控制所述调整装置调整所述钢管的角度。4.根据权利要求3所述的无缝钢管落料系统,其特征在于,所述角度矫正单元控制所述调整装置调整钢管的角度,其中,所述角度矫正单元确定所述钢管的中心位置,控制所述伸缩杆移动至所述中心位置的正上方,控制所述伸缩杆的伸长长度为预设标准伸缩杆伸长长度ls0,控制所述夹持臂对所述钢管进行夹持,并根据夹角位于所述x轴的正轴的方位判定所述夹持臂的转动方向以及转动角度,其中,
当所述夹角位于所述x轴的正轴的左侧时,所述角度矫正单元判定需将所述夹持臂顺时针转动|az|;当所述夹角位于所述x轴的正轴的右侧时,所述角度矫正单元判定需将所述夹持臂逆时针转动|az|。5.根据权利要求1所述的无缝钢管落料系统,其特征在于,所述中控处理器包括摆动臂矫正单元,用以确定图像中钢管的钢管轮廓的宽度b以及高度h,根据所述宽度b以及高度h按照公式(2)计算拨动特征参量p,(2)公式(2)中,b0表示预设标准宽度对比参量,h0表示预设标准高度对比参量。6.根据权利要求5所述的无缝钢管落料系统,其特征在于,所述摆动臂矫正单元将所述拨动特征参量p与预设第一标准拨动特征对比参量p1以及预设第二标准拨动特征对比参量p2进行对比,并根据对比结果判定是否对所述摆动臂的摆动角度以及伸长长度进行调整,并根据判定结果将所述摆动臂的摆动角度以及伸长长度调整至对应值,其中,当p≥p2时,所述摆动臂矫正单元判定对所述摆动臂的摆动角度以及伸长长度进行调整,将所述摆动臂的摆动角度调整至ap,设定ap=ap0 a
p
,并将所述摆动臂的伸长长度调整至lp,设定lp=lp0 l;当p1≤p<p2时,所述摆动臂矫正单元判定不对所述摆动臂的摆动角度以及伸长长度进行调整,控制所述摆动臂的摆动角度为预设标准摆动角度ap0,控制所述摆动臂的伸长长度为预设标准摆动臂伸长长度lp0;当p<p1时,所述摆动臂矫正单元判定对所述摆动臂的摆动角度以及伸长长度进行调整,并将所述摆动臂的摆动角度调整至ap,设定ap=ap
0-a
p
,将所述摆动臂的伸长长度调整至lp,设定lp=lp
0-l;其中,a
p
表示预设标准摆动角度调整量,l表示预设标准摆动臂伸长长度调整量。7.根据权利要求6所述的无缝钢管落料系统,其特征在于,所述中控处理器包括斜板调节单元,其用以获取所述重力传感器检测的重力m,根据所述重力m计算下滑特征参量h,设定(3),公式(3)中m0表示预设标准重力对比参量。8.根据权利要求7所述的无缝钢管落料系统,其特征在于,所述斜板调节单元将所述下滑特征参量h与预设第一标准下滑特征对比参量h1以及预设第二标准下滑特征对比参量h2进行对比,并根据对比结果判定是否对所述斜板的倾斜角度以及所述斜板传送带的传送速度进行调整,并根据判定结果将所述斜板的倾斜角度以及所述斜板传送带的传送速度调整至对应值,其中,当h≥h2时,所述斜板调节单元判定对所述斜板的倾斜角度以及所述斜板传送带的传送速度进行调整,并将所述斜板的倾斜角度调整至ax,设定ax=ax
0-a
x
,控制所述斜板传送带的传送速度调整至vx,设定vx=vx0 v
x
;当h1≤h<h2时,所述斜板调节单元判定不对所述斜板的倾斜角度以及所述斜板传送带的传送速度进行调整,控制所述斜板的倾斜角度为预设标准倾斜角度ax0,控制所述斜板传送带的传送速度为预设标准传送速度vx0;
当h<h1时,所述斜板调节单元判定对所述斜板的倾斜角度以及所述斜板传送带的传送速度进行调整,并将所述斜板的倾斜角度调整至ax,设定ax=ax0 a
x
,控制所述斜板传送带的传送速度调整至vx,设定vx=vx
0-v
x
;其中,a
x
表示预设标准倾斜角度调整量,v
x
表示预设标准传送速度调整量。9.根据权利要求1所述的无缝钢管落料系统,其特征在于,所述中控处理器包括收纳调节单元,其用以将所述钢管轮廓的宽度b与预设第一标准宽度对比参量b1以及预设第二标准宽度对比参量b2进行对比,并根据对比结果判定是否对所述收纳箱的移动速度进行调整,并根据判定结果将所述收纳箱的移动速度调整至对应值,其中,当b≥b2时,所述收纳调节单元判定对所述收纳箱的移动速度进行调整,并将所述收纳箱的移动速度调整至vs,设定vs=vs0 v
s
;当b1≤b<b2时,所述收纳调节单元判定不对所述收纳箱的移动速度进行调整,控制所述收纳箱的移动速度为预设标准移动速度vs0;当b<b1时,所述收纳调节单元判定对所述收纳箱的移动速度进行调整,并将所述收纳箱的移动速度调整至vs,设定vs=vs
0-v
s
;其中,v
s
表示预设标准移动速度调整量。10.根据权利要求9所述的无缝钢管落料系统,其特征在于,所述收纳调节单元用以控制所述收纳箱在所述移动轨道上做往复移动,以及所述收纳调节单元实时获取各所述距离传感器的数据,以检测收纳箱内钢管堆积高度,当所述钢管堆积高度到达预设标准堆积高度时,所述收纳调节单元控制所述收纳箱停止移动。
技术总结
本发明涉及管件落料领域,尤其涉及一种无缝钢管落料系统,本发明设置传送带、摄影装置、调整装置、拨动装置、下料装置、收纳装置以及中控处理器,中控处理器根据摄影装置对传送带拍摄获取的图像中的钢管轮廓计算偏转特征参量以判定是否需要调整钢管的角度,通过确定夹持臂的转动角度以及转动方向控制调整装置调整钢管的角度,根据钢管轮廓的宽度以及高度,调整摆动臂的摆动角度以及伸长长度,根据重力传感器检测的重力计算下滑特征参量,以调整斜板的倾斜角度以及斜板传送带的传送速度,根据钢管轮廓的宽度对收纳箱的移动速度进行调整,以使本发明能应用于各种规格形状的钢管的落料,落料过程稳定,可靠,保证了钢管落料的效率。保证了钢管落料的效率。保证了钢管落料的效率。
技术研发人员:吴国彬 彭玉琦
受保护的技术使用者:张家港嘉园钢铁制品有限公司
技术研发日:2022.11.28
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。