技术特征:
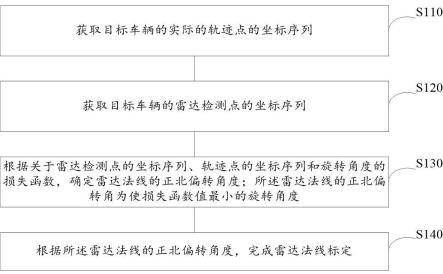
1.一种雷达法线标定方法,其特征在于,包括:获取目标车辆的实际的轨迹点的坐标序列;所述轨迹点的坐标序列处于以雷达安装位置的utm坐标为原点,正东方向为横轴正方向,正北方向为纵轴正方向的第一笛卡尔坐标系内;获取目标车辆的雷达检测点的坐标序列;所述雷达检测点的坐标序列为处于以雷达安装位置的utm坐标为原点,雷达法线方向为纵轴正方向,法线方向顺时针旋转90
°
为横轴正方向的第二笛卡尔坐标系内;根据关于雷达检测点的坐标序列、轨迹点的坐标序列和旋转角度的损失函数,确定雷达法线的正北偏转角度,以完成雷达法线标定;所述雷达法线的正北偏转角度为使损失函数值最小的旋转角度;利用所述雷达法线的正北偏转角度,完成雷达法线标定。2.根据权利要求1所述的方法,其特征在于,所述根据关于雷达检测点的坐标序列、轨迹点的坐标序列和旋转角度的损失函数,确定雷达法线的正北偏转角度,包括:计算所述第二笛卡尔坐标系以原点为圆心旋转目标角度后的每个雷达检测点的坐标,得到第一旋转坐标序列;计算每个雷达检测点的第一旋转坐标与各轨迹点的坐标的欧式距离,得到每个雷达检测点对应的第一结果序列;从每个雷达检测点对应的第一结果序列中获取最小的欧式距离值,作为第二结果;将每个雷达检测点对应的第二结果的相加,得到损失函数值;根据不同目标角度的损失函数值,确定损失函数值最小的角度为雷达法线的正北偏转角度。3.根据权利要求1所述的方法,其特征在于,所述根据关于雷达检测点的坐标序列、轨迹点的坐标序列和旋转角度的损失函数,确定雷达法线的正北偏转角度,包括:计算所述第一笛卡尔坐标系以原点为圆心旋转目标角度后的每个轨迹点的坐标,得到第二旋转坐标序列;计算每个轨迹点的第二旋转坐标与各雷达检测点的坐标的欧式距离,得到每个轨迹点对应的第三结果序列;从每个轨迹点对应的第三结果序列中获取最小的欧式距离值,作为第四结果;将每个轨迹点对应的第四结果的相加,得到损失函数值;根据不同目标角度的损失函数值,确定损失函数值最小的角度为雷达法线的正北偏转角度。4.根据权利要求1所述的方法,其特征在于,所述获取目标车辆的实际的轨迹点的坐标序列,包括:获取雷达安装位置的经纬度;从目标车辆的导航系统中获取目标车辆在雷达检测区域行驶的轨迹点的经纬度序列;将所述雷达安装位置的经纬度转换为utm坐标;将所述轨迹点的经纬度序列转换为轨迹点的初始utm坐标序列;将轨迹点的初始utm坐标序列转换到以雷达安装位置的utm坐标为原点的第一笛卡尔坐标系内,得到轨迹点的坐标序列。
5.根据权利要求1所述的方法,其特征在于,所述利用所述雷达法线的正北偏转角度,完成雷达法线标定,包括:将所述第一笛卡尔坐标系以原点为圆心旋转正北偏转角度,完成雷达法线标定;或者,将所述第二笛卡尔坐标系以原点为圆心旋转正北偏转角度,完成雷达法线标定。6.根据权利要求4所述的方法,其特征在于,所述获取雷达安装位置的经纬度,包括:获取rtk设备测量的雷达安装位置得到的经纬度。7.根据权利要求1所述的方法,其特征在于,所述获取目标车辆的雷达检测点的坐标序列,包括:获取不同时刻的雷达目标跟踪数据;所述雷达目标跟踪数据包括多个多个车辆的雷达检测点;根据目标车辆的标识信息从不同时刻的雷达目标跟踪数据中获得目标车辆的雷达检测点的坐标序列。8.根据权利要求7所述的方法,其特征在于,所述获取不同时刻的雷达目标跟踪数据之前,所述方法还包括:对原始雷达点云数据进行去噪处理。9.一种雷达法线标定装置,其特征在于,包括:第一获取单元,用于获取目标车辆的实际的轨迹点的坐标序列;所述轨迹点的坐标序列处于以雷达安装位置的utm坐标为原点,正东方向为横轴正方向,正北方向为纵轴正方向的第一笛卡尔坐标系内;第二获取单元,获取目标车辆的雷达检测点的坐标序列;所述雷达检测点的坐标序列为处于以雷达安装位置的utm坐标为原点,雷达法线方向为纵轴正方向,法线方向顺时针旋转90
°
为横轴正方向的第二笛卡尔坐标系内;正北偏转角确定单元,根据关于雷达检测点的坐标序列、轨迹点的坐标序列和旋转角度的损失函数,确定雷达法线的正北偏转角;所述雷达法线的正北偏转角为使损失函数值最小的旋转角度;标定单元,用于利用所述雷达法线的正北偏转角度,完成雷达法线标定。10.根据权利要求9所述的装置,其特征在于,所述正北偏转角确定单元,包括:第一计算单元,用于计算所述第二笛卡尔坐标系以原点为圆心旋转目标角度后的每个雷达检测点的坐标,得到第一旋转坐标序列;第二计算单元,用于计算每个雷达检测点的第一旋转坐标与各轨迹点的坐标的欧式距离,得到每个雷达检测点对应的第一结果序列;第二结果获得单元,用于从每个雷达检测点对应的第一结果序列中获取最小的欧式距离值,作为第二结果;第一损失函数值获得单元,用于将每个雷达检测点对应的第二结果的相加,得到损失函数值;第一确定单元,用于根据不同目标角度的损失函数值,确定损失函数值最小的角度为雷达法线的正北偏转角度。11.根据权利要求9所述的装置,其特征在于,所述正北偏转角确定单元,包括:第三计算单元,用于计算所述第一笛卡尔坐标系以原点为圆心旋转目标角度后的每个轨迹点的坐标,得到第二旋转坐标序列;
第四计算单元,用于计算每个轨迹点的第二旋转坐标与各雷达检测点的坐标的欧式距离,得到每个轨迹点对应的第三结果序列;第四结果获得单元,用于从每个轨迹点对应的第三结果序列中获取最小的欧式距离值,作为第四结果;第二损失函数值获得单元,用于将每个轨迹点对应的第四结果的相加,得到损失函数值;第二确定单元,用于根据不同目标角度的损失函数值,确定损失函数值最小的角度为雷达法线的正北偏转角度。12.一种雷达法线标定系统,其特征在于,包括:雷达、装载有gnss系统的目标车辆和标定终端;所述标定终端用于获取目标车辆的实际的轨迹点的坐标序列;所述轨迹点的坐标序列处于以雷达安装位置的utm坐标为原点,正东方向为横轴正方向,正北方向为纵轴正方向的第一笛卡尔坐标系内;获取目标车辆的雷达检测点的坐标序列;所述雷达检测点的坐标序列为处于以雷达安装位置的utm坐标为原点,雷达法线方向为纵轴正方向,法线方向顺时针旋转90
°
为横轴正方向的第二笛卡尔坐标系内;根据关于雷达检测点的坐标序列、轨迹点的坐标序列和旋转角度的损失函数,确定雷达法线的正北偏转角;所述雷达法线的正北偏转角为使损失函数值最小的旋转角度;根据所述雷达法线的正北偏转角度,完成雷达法线标定。13.一种雷达法线标定设备,其特征在于,包括:存储器,处理器,及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-8任一项所述的雷达法线标定方法。14.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有指令,当所述指令在终端设备上运行时,使得所述终端设备执行如权利要求1-8任一项所述的雷达法线标定方法。
技术总结
本申请公开了一种雷达法线标定方法、装置、系统、设备和存储介质。该方法包括:获取目标车辆的实际的轨迹点的坐标序列;获取目标车辆的雷达检测点的坐标序列;根据关于雷达检测点的坐标序列、轨迹点的坐标序列和旋转角度的损失函数,确定雷达法线的正北偏转角;雷达法线的正北偏转角为使损失函数值最小的旋转角度;根据雷达法线的正北偏转角度,完成雷达法线标定。本申请利用损失函数、车辆的导航轨迹数据和雷达检测轨迹数据,确定雷达法线的正北偏转角度。移动的车辆在不同的时刻相当于不同的检测目标点,即满足标定过程中对多目标点的需求,又避免了在复杂交通场景下放置角反的危险,从车辆导航中获取车辆的实际轨迹数据,简化了标定过程。化了标定过程。化了标定过程。
技术研发人员:仇世豪 顾超 陈俊德
受保护的技术使用者:南京慧尔视智能科技有限公司
技术研发日:2022.11.30
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。