技术特征:
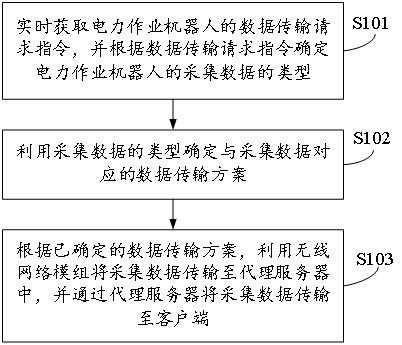
1.一种电力作业机器人的数据传输方法,其特征在于,所述方法应用于所述电力作业机器人内置的工控机中,所述工控机利用内置的无线网络模组将所述电力作业机器人的采集数据通过代理服务器传输至客户端;所述方法包括:实时获取所述电力作业机器人的数据传输请求指令,并根据所述数据传输请求指令确定所述电力作业机器人的采集数据的类型;利用所述采集数据的类型确定与所述采集数据对应的数据传输方案;根据已确定的所述数据传输方案,利用所述无线网络模组将所述采集数据传输至所述代理服务器中,并通过所述代理服务器将所述采集数据传输至所述客户端。2.根据权利要求1所述的电力作业机器人的数据传输方法,其特征在于,根据所述数据传输请求指令确定所述电力作业机器人的采集数据的类型,包括:利用所述数据传输请求指令实时获取所述电力作业机器人的采集数据;根据所述采集数据中包含的所述电力作业机器人的运动数据、点云文件和图片数据,将所述采集数据的类型确定为文件数据类型。3.根据权利要求2所述的电力作业机器人的数据传输方法,其特征在于,利用所述采集数据的类型确定与所述采集数据对应的数据传输方案的步骤,包括:当所述采集数据的类型为所述文件数据类型时,利用socket协议对文件数据采集端和文件数据接收端进行初始化;确定所述文件数据采集端对应的第一数据传输方案;其中,所述第一数据传输方案用于利用socket协议将所述文件数据采集端采集的所述电力作业机器人的运动数据、点云文件和图片数据推送至所述代理服务器中;确定所述文件数据接收端对应的第二数据传输方案;其中,所述第二数据传输方案用于利用socket协议控制所述文件数据接收端从所述代理服务器中获取所述电力作业机器人的运动数据、点云文件和图片数据;利用所述第一数据传输方案和所述第二数据传输方案确定所述采集数据对应的数据传输方案。4.根据权利要求3所述的电力作业机器人的数据传输方法,其特征在于,根据已确定的所述数据传输方案,利用所述无线网络模组将所述采集数据传输至所述代理服务器中,并通过所述代理服务器将所述采集数据传输至所述客户端,包括:利用所述第一数据传输方案,控制所述无线网络模组将所述文件数据采集端采集的所述采集数据传输至代理服务器中;利用所述第二数据传输方案,控制所述文件数据接收端从所述代理服务器中获取所述采集数据,并根据所述采集数据渲染生成所述电力作业机器人的机械臂的运行轨迹和点云模型;通过所述代理服务器将所述电力作业机器人的机械臂的运行轨迹和点云模型发送至所述客户端。5.根据权利要求1所述的电力作业机器人的数据传输方法,其特征在于,根据所述数据传输请求指令确定所述电力作业机器人的采集数据的类型,包括:利用所述数据传输请求指令实时获取所述电力作业机器人的采集数据;
根据所述采集数据中包含的所述电力作业机器人的视频流数据,将所述采集数据的类型确定为视频数据类型。6.根据权利要求5所述的电力作业机器人的数据传输方法,其特征在于,利用所述采集数据的类型确定与所述采集数据对应的数据传输方案的步骤,包括:当所述采集数据的类型为所述视频数据类型时,利用srs流媒体协议对视频数据采集端和视频数据接收端进行初始化;确定所述视频数据采集端对应的第三数据传输方案;其中,所述第三数据传输方案用于将所述电力作业机器人采集的rtsp视频流转为rtmp视频流,并利用srs流媒体协议将rtmp视频流推送至所述代理服务器中;确定所述视频数据接收端对应的第四数据传输方案;其中,所述第四数据传输方案用于将利用srs流媒体协议从所述代理服务器中获取rtmp视频流;利用所述第三数据传输方案和所述第四数据传输方案确定所述采集数据对应的数据传输方案。7.根据权利要求6所述的电力作业机器人的数据传输方法,其特征在于,根据已确定的所述数据传输方案,利用所述无线网络模组将所述采集数据传输至所述代理服务器中,并通过所述代理服务器将所述采集数据传输至所述客户端的步骤,包括:利用所述第三数据传输方案将所述采集数据中包含的rtsp视频流转为rtmp视频流,并控制所述视频数据采集端将rtmp视频流推送至所述代理服务器中;利用所述第四数据传输方案,控制所述视频数据接收端从所述代理服务器中获取所述采集数据,并根据所述采集数据中包含的rtmp视频流转为webrtc视频流;通过所述代理服务器将所述采集数据中包含的webrtc视频流发送至所述客户端。8.一种电力作业机器人的数据传输系统,其特征在于,所述系统应用于所述电力作业机器人内置的工控机中,所述工控机利用内置的无线网络模组将所述电力作业机器人的采集数据通过代理服务器传输至客户端;所述系统包括:采集数据类型确定模块,用于实时获取所述电力作业机器人的数据传输请求指令,并根据所述数据传输请求指令确定所述电力作业机器人的采集数据的类型;数据传输方案确定模块,用于利用所述采集数据的类型确定与所述采集数据对应的数据传输方案;数据传输执行模块,用于根据已确定的所述数据传输方案,利用所述无线网络模组将所述采集数据传输至所述代理服务器中,并通过所述代理服务器将所述采集数据传输至所述客户端。9.一种电子设备,其特征在于,包括:处理器和存储装置;所述存储装置上存储有计算机程序,所述计算机程序在被所述处理器运行时实现如上述权利要求1至7任一项所述的电力作业机器人的数据传输方法的步骤。10.一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器运行时实现上述权利要求1至7任一项所述的电力作业机器人的数据传输方法的步骤。
技术总结
本发明提供了一种电力作业机器人的数据传输方法、系统及电子设备,涉及自动化控制领域,该方法从电力作业机器人中实时获取数据传输请求指令,并根据数据传输请求指令确定电力作业机器人的采集数据的类型;然后利用采集数据的类型确定与采集数据对应的数据传输方案;最后根据已确定的数据传输方案,利用无线网络模组将采集数据传输至代理服务器中,并通过代理服务器将采集数据传输至客户端;该数据传输方法利用无线网络模组将采集数据通过代理服务器传输至客户端,打通了机械臂与客户端的无线连接网络,实现了低成本的无线网络通信,从而解决了现有技术存在的电力机器人数据传输中存在的传输距离短、数据传输效率低的问题。数据传输效率低的问题。数据传输效率低的问题。
技术研发人员:孙楠楠 李帅 任青亭 董文旭 李俊强 王跃东 赵欣媛 张云强 李明
受保护的技术使用者:国网瑞嘉(天津)智能机器人有限公司
技术研发日:2022.11.29
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。