基于los感知uav毫米波系统的叠加csi反馈方法
技术领域
1.本发明涉及fdd(frequency division duplex)模式下无人机(uav,unmanned aerial vehicle)毫米波大规模mimo(multiple input multiple output)系统的叠加反馈技术领域,特别涉及基于los感知uav毫米波系统的叠加信道状态信息(csi,channel state information)反馈方法。
背景技术:
2.作为满足未来5g(the fifth generation wireless communication)网络高可靠性、优异的灵活性和大带宽可用性的关键技术,uav毫米波大规模mimo系统通过在地面基站端部署的上百根天线,弥补毫米波传播的显著路径衰减。同时,uav毫米波大规模mimo系统中诸多带来性能提升的操作(如调制方案的选择、资源管理和波束形成等)依赖于准确的地面基站端到uav用户端(g2u,ground-to-uav)csi的获取。在频分双工(fdd,frequency division duplex)模式下,uav毫米波大规模mimo系统中信道间存在微弱的互惠性,g2u csi只能由uav用户端反馈回基站。
3.传统基于压缩感知(cs,compressed sensing)反馈技术在利用信号稀疏性的情况下,虽能在一定程度降低系统反馈开销,但压缩信号的重构过程中有大量的计算开销;基于深度学习(dl,deep learning)的反馈技术因其结构简单,在线测试快等优点,引起广泛关注,但在其csi反馈过程中仍占用额外的频谱资源。
4.近年来,叠加编码(sc,superimposed coding)技术以其能够高效利用频谱资源的特性,被广泛应用于无线通信各领域。但叠加编码不可避免地会引入叠加干扰。已有的基于sc的csi反馈方案不是针对uav毫米波大规模mimo系统的专用开发方法,因此在uav毫米波大规模mimo系统中的适用性有待进一步验证。特别是,uav毫米波大规模mimo系统中视线传输(los,line ofsight)场景高概率发生的固有特性尚未得到开发。
技术实现要素:
5.本发明的目的在于提供基于los感知uav毫米波系统的叠加csi反馈方法,与非叠加的csi反馈相比,本发明节省了uav发射机的能耗和uav毫米波系统的带宽占用;与叠加的csi反馈相比,本发明根据对los场景的感知开发,极大的提高g2u csi和uav到地面基站(u2g,uav-to-ground)数据的重构精度,同时显著提高了g2u csi和u2g数据的重构效率。
6.本发明的技术方案如下:
7.基于los感知uav毫米波系统的叠加csi反馈方法,包括以下步骤:
8.s1.根据u2g csi的估计矩阵通过los感知模块获得对应的感知结果w;
9.所述u2g csi,是指uav端到地面基站的信道状态信息;
10.所述los,是指视距范围内能量最强的直射路径;
11.所述的u2g csi的估计矩阵通过对接收信号进行信道估计获得,估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;
12.其中,la代表簇路径数,n代表地面基站的天线数,m代表u2g数据的长度;
13.s2.将基站端的接收信号y进行压缩g2u csi恢复,得到压缩g2u csi恢复矢量
14.所述的压缩g2u csi恢复过程包括:第一次解扩、第一次压缩g2u csi估计、压缩g2u csi干扰消除、u2g数据检测、u2g数据干扰消除、第二次解扩和第二次压缩g2u csi估计;
15.所述第一次解扩,是将接收信号y进行uav端扩频的逆过程,获得第一次解扩矢量;
16.所述压缩g2u csi,是指压缩后的地面基站到uav端的信道状态信息;
17.所述第一次压缩g2u csi估计,是指对第一次解扩信号进行关于压缩g2u csi的估计,获得初步压缩g2u csi估计矢量,估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;
18.所述压缩g2u csi干扰消除,是指将初步压缩g2u csi估计矢量从接收信号y中减去,获得u2g数据初步矢量;
19.所述u2g数据,是指地面基站端的发送信号中的uav端到地面基站端的用户数据;
20.所述u2g数据检测,是指将u2g数据初步矢量进行关于u2g数据的检测,获得u2g数据初步检测矢量,检测方法选自zf检测、mmse检测、最大似然检测中的一种或多种;
21.所述压缩u2g数据干扰消除,是指将u2g数据初步检测矢量从接收信号y中减去,获得干扰消除后的压缩g2u csi矢量;
22.所述第二次解扩,是指将干扰消除后的压缩g2u csi矢量进行解扩,获得第二次解扩矢量;
23.所述第二次压缩g2u csi估计,是指对第二次解扩信号进行关于压缩g2u csi的估计,获得压缩g2u csi恢复矢量估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;
24.所述压缩g2u csi恢复矢量是指地面基站端根据uav端发送信号中的压缩g2u csi矢量z进行恢复后得到的对应压缩g2u csi矢量;
25.s3.根据感知结果w,通过los判决器对压缩g2u csi恢复矢量是否存在los进行判决,得到存在los的压缩g2u csi恢复矢量或不存在los的压缩g2u csi恢复矢量
26.s4.根据存在los的压缩g2u csi恢复矢量通过los辅助网络获得存在los的压缩g2u csi优化矢量
27.s5.将存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量通过叠加干扰消除恢复得到u2g数据检测矢量
28.所述叠加干扰消除,是指将存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量从均衡信号中减去,获得u2g数据检测矢量
29.所述均衡信号,是指对接收信号y进行信道均衡处理后获得的信号,信道均衡方法选自zf均衡、mmse均衡、判决反馈均衡、最大似然均衡、盲均衡中的一种或多种;
30.s6.根据存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量通过csi恢复网络恢复得到g2u csi重构矢量
31.在一些具体实施方式中,步骤s1所述los感知模块包括以下子步骤:
32.s11.根据u2g csi的估计矩阵采用los感知网络获得初步感知结果ω;
33.s12.根据初步感知结果ω,通过阈值硬判决器获得感知结果w。
34.在一些优选实施方式中,所述los感知网络包括:
35.一个含有线性激活函数的输入层、一个含有relu激活函数的卷积层、一个最大池化层、一个展平层、一个含有sigmoid激活函数的全连接输出层;其中,卷积层的卷积核大小为a
×
a,卷积核个数为b,最大池化层的滤波器大小为c
×
c,全连接输出层神经元个数为1,a、b和c分别表示根据工程预设确定的卷积核大小、卷积核个数和最大池化层的滤波器大小;
36.构建训练数据集对los感知网络进行训练,获得los感知网络的网络参数θe;
37.所述的los感知网络训练数据通过对u2g csi的估计矩阵进行实值化获得,即
[0038][0039]
所述的los感知网络训练标签e通过对u2g csi g进行是否存在los场景的判决获得,即,u2g csi g存在los场景,则e=1,反之,则e=0;
[0040]
在线运行时,将u2g csi的估计矩阵实值化后输入los感知网络,获得初步感知结果ω;
[0041]
在具体应用中,该los感知网络的输入为所述u2g csi的估计矩阵的实值化形式,输出为初步感知结果ω;
[0042]
更优选的,该los感知网络的训练损失函数采用均方误差损失函数。
[0043]
在具体应用中,所述阈值硬判决器的阈值为β,阈值硬判决器获得的感知结果w为0或者1,β表示根据工程预设确定的阈值。
[0044]
在一些具体的实施方式中,步骤s3所述los判决器进一步包括:
[0045]
将压缩g2u csi恢复矢量作为los判决器的输入,los判决器的判决条件为感知结果w;当感知结果w为0时,los判决器的输出为不存在los的压缩g2u csi恢复矢量当感知结果w为1时,los判决器的输出为存在los的压缩g2u csi恢复矢量
[0046]
在一些优选实施方式中,步骤s4所述los辅助网络包括:
[0047]
一个含有线性激活函数的输入层、一个含有leaky relu激活函数的隐藏层和一个含有线性激活函数的输出层;其中,输入层、隐藏层和输出层节点数分别为2n、kn和2n,k表示根据工程预设确定的隐藏层节点系数;
[0048]
以uav端发出的实值化压缩g2u csi矢量为标签,构建训练数据集对los辅助网络进行训练,获得los辅助网络的网络参数θz;
[0049]
所述的los辅助网络训练数据通过对存在los的压缩g2u csi恢复矢量进行实值化获得,即
[0050][0051]
所述实值化压缩g2ucsi矢量z
label
通过对压缩g2ucsi矢量z进行实值化获得,即,
[0052]zlabel
=[re(z),im(z)];
[0053]
在线运行时,将存在los的压缩g2u csi恢复矢量实值化后输入los辅助网络,获得存在los的压缩g2u csi恢复的优化矢量
[0054]
在具体应用中,该los辅助网络的输入为所述存在los的压缩g2u csi恢复矢量的实值化形式,输出为存在los的压缩g2u csi恢复的优化矢量
[0055]
更优选的,该los辅助网络的训练损失函数采用均方误差损失函数。
[0056]
在一些优选实施方式中,步骤s6所述csi恢复网络包括:
[0057]
一个含有线性激活函数的输入层、一个含有leaky relu激活函数的隐藏层和一个含有线性激活函数的输出层;其中,输入层、隐藏层和输出层节点数分别为2n、qlan和2lan,q表示根据工程预设确定的隐藏层节点系数;
[0058]
以uav端发出的实值化g2u csi矢量h
label
为标签,存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量为训练输入h
train
,构建训练数据集{h
train
,h
label
}对csi恢复网络进行训练,获得csi恢复网络的网络参数θh;
[0059]
所述实值化的不存在los的压缩g2u csi恢复矢量通过对不存在los的压缩g2u csi恢复矢量进行实值化获得,即
[0060][0061]
所述实值化g2u csi矢量h
label
通过对g2u csi矢量h进行实值化获得,即,
[0062]hlabel
=[re(h),im(h)];
[0063]
其中,re(
·
)表示取实部,im(
·
)表示取虚部;
[0064]
在线运行时,将存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量输入csi恢复网络,获得g2u csi重构矢量
[0065]
在具体应用中,该csi恢复网络的输入为所述存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量的形式,输出为g2u csi重构矢量
[0066]
更优选的,该csi恢复网络的训练损失函数采用均方误差损失函数。
[0067]
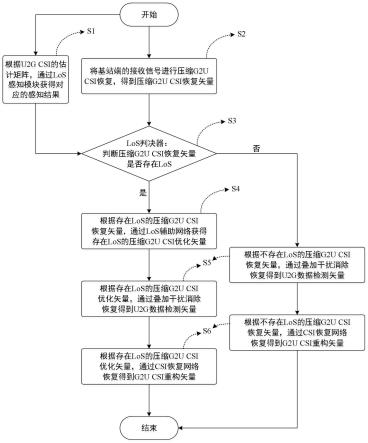
本发明利用uav毫米波大规模mimo系统中los场景高概率发生的固有特性,通过利用los感知模块感知u2g csi的估计矩阵是否存在los,来判断利用压缩g2u csi恢复得到的压缩g2u csi恢复矢量是否存在los。对存在los的压缩g2u csi恢复矢量利用los辅助网络获得存在los的压缩g2u csi优化矢量,再通过叠加干扰消除恢复得到u2g数据检测矢量,通过csi恢复网络恢复得到g2u csi重构矢量;对不存在los的压缩g2u csi恢复矢量直接通过叠加干扰消除和csi恢复网络分别恢复得到u2g数据检测矢量和g2u csi重构矢量。在uav毫米波大规模mimo系统中,本发明在不增加uav发射机的能耗和uav毫米波系统频谱开销的情况下,可有效降低叠加编码造成的相互干扰以保证g2u csi的u2g数据的重构精度。
[0068]
与非叠加的csi反馈相比,本发明节省了uav发射机的能耗和uav毫米波系统的带宽占用;与叠加的csi反馈相比,本发明根据对los场景的感知开发,极大的提高了g2u csi
和u2g数据的重构精度,同时显著提高了g2u csi和u2g数据的重构效率。
附图说明
[0069]
图1为本发明的总体流程示意图;
[0070]
图2为本发明的los感知网络结构示意图;
[0071]
图3为本发明的los辅助网络结构示意图;
[0072]
图4为本发明的csi恢复网络结构示意图。
具体实施方式
[0073]
以下结合实施例和附图对本发明进行详细描述,但需要理解的是,所述实施例和附图仅用于对本发明进行示例性的描述,而并不能对本发明的保护范围构成任何限制。所有包含在本发明的发明宗旨范围内的合理的变换和组合均落入本发明的保护范围。
[0074]
参照图1,一种具体的基于los感知uav毫米波系统的叠加csi反馈方法包括:
[0075]
s1.根据u2g csi的估计矩阵通过los感知模块获得对应的感知结果w;
[0076]
其中,更具体的一些实施方式如:
[0077]
所述的u2g csi的估计矩阵通过对接收信号进行信道估计获得,估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;
[0078]
其中,la代表簇路径数,n代表地面基站的天线数,m代表u2g数据的长度。
[0079]
所述los感知模块包括以下子步骤:
[0080]
s11.根据u2g csi的估计矩阵采用los感知网络获得初步感知结果ω;
[0081]
s12.根据初步感知结果ω,通过阈值硬判决器获得感知结果w;
[0082]
参照图2,所述los感知网络包括:
[0083]
一个含有线性激活函数的输入层、一个含有relu激活函数的卷积层、一个最大池化层、一个展平层、一个含有sigmoid激活函数的全连接输出层。
[0084]
该los感知网络的卷积层的卷积核大小为a
×
a,卷积核个数为b,最大池化层的滤波器大小为c
×
c,全连接输出层神经元个数为1,a、b和c分别表示根据工程预设确定的卷积核大小、卷积核个数和最大池化层的滤波器大小。
[0085]
通过该los感知网络获得初步感知结果ω的过程包括:
[0086]
构建训练数据集对los感知网络进行训练,获得los感知网络的网络参数θe;
[0087]
所述的los感知网络训练数据是通过对u2g csi的估计矩阵进行实值化获得,即
[0088][0089]
所述的los感知网络训练标签e是通过对u2g csi g进行是否存在los场景的判决获得,即,u2g csi g存在los场景,则e=1,反之,则e=0;
[0090]
在线运行时,将u2g csi的估计矩阵实值化后输入los感知网络,获得初步感知结果ω;
[0091]
在具体应用中,该los感知网络的输入为所述u2g csi的估计矩阵的实值化形式,输出为初步感知结果ω;
[0092]
所述los感知网络的训练损失函数采用均方误差损失函数。
[0093]
在具体应用中,所述阈值硬判决器的阈值为β,阈值硬判决器获得的感知结果w为0或者1,β表示根据工程预设确定的阈值。
[0094]
s2.将基站端的接收信号y进行压缩g2u csi恢复,得到压缩g2u csi恢复矢量
[0095]
其中,更具体的一些实施方式如:
[0096]
所述的压缩g2u csi恢复过程包括:第一次解扩、第一次压缩g2u csi估计、压缩g2u csi干扰消除、u2g数据检测、u2g数据干扰消除、第二次解扩和第二次压缩g2u csi估计;
[0097]
所述第一次解扩,是将接收信号y进行uav端扩频的逆过程,获得第一次解扩矢量;
[0098]
所述压缩g2u csi,是指压缩后的地面基站到uav端的信道状态信息;
[0099]
所述第一次压缩g2u csi估计,是指对第一次解扩信号进行关于压缩g2u csi的估计,获得初步压缩g2u csi估计矢量,估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;
[0100]
所述压缩g2u csi干扰消除,是指将初步压缩g2u csi估计矢量从接收信号y中减去,获得u2g数据初步矢量;
[0101]
所述u2g数据,是指地面基站端的发送信号中的uav端到地面基站端的用户数据;
[0102]
所述u2g数据检测,是指将u2g数据初步矢量进行关于u2g数据的检测,获得u2g数据初步检测矢量,检测方法选自zf检测、mmse检测、最大似然检测中的一种或多种;
[0103]
所述压缩u2g数据干扰消除,是指将u2g数据初步检测矢量从接收信号y中减去,获得干扰消除后的压缩g2u csi矢量;
[0104]
所述第二次解扩,是指将干扰消除后的压缩g2u csi矢量进行解扩,获得第二次解扩矢量;
[0105]
所述第二次压缩g2u csi估计,是指对第二次解扩信号进行关于压缩g2u csi的估计,获得压缩g2u csi恢复矢量估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;
[0106]
所述压缩g2u csi恢复矢量是指地面基站端根据uav端发送信号中的压缩g2u csi矢量z进行恢复后得到的对应压缩g2u csi矢量。
[0107]
s3.根据感知结果w,通过los判决器对压缩g2u csi恢复矢量是否存在los进行判决,得到存在los的压缩g2u csi恢复矢量或不存在los的压缩g2u csi恢复矢量
[0108]
其中,更具体的一些实施方式如:
[0109]
将压缩g2u csi恢复矢量作为los判决器的输入,los判决器的判决条件为感知结果w;当感知结果w为0时,los判决器的输出为不存在los的压缩g2u csi恢复矢量当感知结果w为1时,los判决器的输出为存在los的压缩g2u csi恢复矢量
[0110]
s4.根据存在los的压缩g2u csi恢复矢量通过los辅助网络获得存在los的压
缩g2u csi优化矢量
[0111]
其中,更具体的一些实施方式如:
[0112]
参照图3,所述los辅助网络包括:
[0113]
一个含有线性激活函数的输入层、一个含有leaky relu激活函数的隐藏层和一个含有线性激活函数的输出层。
[0114]
该los辅助网络的输入层、隐藏层和输出层节点数分别为2n、kn和2n,k表示隐藏层节点系数,可根据工程预设得到。
[0115]
通过该los辅助网络获得存在los的压缩g2u csi优化矢量的过程包括:
[0116]
以uav端发出的实值化压缩g2u csi矢量为标签,构建训练数据集对los辅助网络进行训练,获得los辅助网络的网络参数θz;
[0117]
所述的los辅助网络训练数据是通过对存在los的压缩g2u csi恢复矢量进行实值化获得,即
[0118][0119]
所述实值化压缩g2u csi矢量z
label
是通过对压缩g2u csi矢量z进行实值化获得,即,
[0120]zlabel
=[re(z),im(z)];
[0121]
在线运行时,将存在los的压缩g2u csi恢复矢量实值化后输入los辅助网络,获得存在los的压缩g2u csi恢复的优化矢量
[0122]
在具体应用中,该los辅助网络的输入为所述存在los的压缩g2u csi恢复矢量的实值化形式,输出为存在los的压缩g2u csi恢复的优化矢量
[0123]
所述los辅助网络的训练损失函数采用均方误差损失函数。
[0124]
s5.将存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量通过叠加干扰消除恢复得到u2g数据检测矢量
[0125]
其中,更具体的一些实施方式如:
[0126]
所述叠加干扰消除,是指将存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量从均衡信号中减去,获得u2g数据检测矢量
[0127]
所述均衡信号,是指对接收信号y进行信道均衡处理后获得的信号,信道均衡方法选自zf均衡、mmse均衡、判决反馈均衡、最大似然均衡、盲均衡中的一种或多种。
[0128]
s6.根据存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量通过csi恢复网络恢复得到g2u csi重构矢量
[0129]
其中,更具体的一些实施方式如:
[0130]
参照图4,所述csi恢复网络包括:
[0131]
一个含有线性激活函数的输入层、一个含有leaky relu激活函数的隐藏层和一个含有线性激活函数的输出层。
[0132]
该csi恢复网络的输入层、隐藏层和输出层节点数分别为2n、qlan和2lan,q表示隐
藏层节点系数,可根据工程预设得到。
[0133]
通过该csi恢复网络获得g2u csi重构矢量的过程包括:
[0134]
以uav端发出的实值化g2u csi矢量h
label
为标签,存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量为训练输入h
train
,构建训练数据集{h
train
,h
label
}对csi恢复网络进行训练,获得csi恢复网络的网络参数θh;
[0135]
所述实值化的不存在los的压缩g2u csi恢复矢量通过对不存在los的压缩g2u csi恢复矢量进行实值化获得,即
[0136][0137]
所述实值化g2u csi矢量h
label
通过对g2u csi矢量h进行实值化获得,即,
[0138]hlabel
=[re(h),im(h)];
[0139]
其中,re(
·
)表示取实部,im(
·
)表示取虚部;
[0140]
在线运行时,将存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量输入csi恢复网络,获得g2u csi重构矢量
[0141]
在具体应用中,该csi恢复网络的输入为所述存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量的形式,输出为g2u csi重构矢量
[0142]
所述csi恢复网络的训练损失函数采用均方误差损失函数。
[0143]
实施例1
[0144]
步骤s1中,获得los感知网络训练数据的一个具体实施例如下:
[0145]
假设:la=2,n=3,用于进行实值化的u2g csi的估计矩阵为:
[0146][0147]
对u2g csi的估计矩阵进行实值化,即可计算出los感知网络训练数据为:
[0148][0149]
实施例2
[0150]
步骤s4中,获得los辅助网络训练数据的一个具体实施例如下:
[0151]
假设:n=3,存在los的压缩g2u csi恢复矢量为:
[0152][0153]
对存在los的压缩g2u csi恢复矢量进行实值化,即,可计算出los辅助网络训练数据为:
[0154][0155]
实施例3
[0156]
步骤s6中,获得实值化g2u csi矢量h
label
的一个具体实施例如下:
[0157]
假设:n=3,la=2,g2u csi矢量h为:
[0158][0159]
对g2u csi矢量h进行实值化,即h
label
=[re(h),im(h)],可计算出作为csi恢复网络标签的实值化g2u csi矢量h
label
为:
[0160][0161]
以上实施例仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。凡属于本发明思路下的技术方案均属于本发明的保护范围。应该指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下的改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。