1.本实用新型涉及汽车装备制造技术领域,特别涉及一种机器人自动抓取的精度料框。
背景技术:
2.现有的汽车生产过程中,随着生产线全自动化的提高,越来越多的工厂使用机械手来完成大部分的工作,如焊接工位,为了使得机械手机器人能准确的抓取汽车零部件,工厂对上料工位自动化的需求也越来越高,汽车零部件一般使用料框存放和运输至上料工位,但是普通的存放料框结构简单,只是在底部设置有滑轮以便于推动运输,无法实现定位固定的作用,进而无法满足机器人进行准确的自动抓取,需人工搬运上料。
3.人工搬运上料存在很多的问题:
4.1)人工搬运上料,人员成本较高,且效率低下;
5.2)人工搬运受力点不均匀,易使零件变形;
6.3)在产线运行过程中,人工干预上料,存在人员安全隐患;
7.故需要研究一种机器人自动抓取的精度料框。
技术实现要素:
8.本实用新型实施例的目的在于提供一种机器人自动抓取的精度料框,解决了人工搬运成本高、效率低、易变形和存在安全隐患的问题。
9.为了达到上述目的,本实用新型实施例提供一种机器人自动抓取的精度料框,包括料框主体,所述料框主体的内侧设置有支架,所述支架上放置有零部件,所述料框主体的底部设置有球形定位装置与产线上件工位的定位球配合用以将料框主体定位固定。
10.可选的,所述料框主体为正方体框架,该正方体侧面为三面框架一面开口且顶部开口。
11.可选的,所述支架为内设在料框主体上侧的三角形支架和底部的矩形支架。
12.可选的,所述三角形支架和矩形支架的上表面均设置有垫条防止零部件划损。
13.可选的,所述球形定位装置为底部球形碗状的凹面结构,其通过连接块安装在料框主体的底部四角。
14.可选的,四个所述球形定位装置与外置的产线上件工位上的四个定位球相匹配,球形定位装置的凹面结构包裹定位球。
15.可选的,所述料框主体的底部安装有滑动轮,所述滑动轮的水平面低于球形定位装置的水平面。
16.可选的,所述料框主体的内侧壁横向设置有压紧件用以将零部件侧面接触压紧。
17.可选的,所述压紧件为压杆,所述压杆的一端与通过转轴与料框主体转动连接,其另一端与搭在料框主体内侧壁上设置的搭块上。
18.可选的,所述零部件与支架四处接触形成矩形接触面,所述零部件与压杆一处接
触从而稳定放置。
19.上述技术方案中的一个技术方案具有如下优点或有益效果:
20.本实用新型中:
21.1)通过设置的球形定位装置与工作台相匹配,运用弧面导向助力,能够实现产线料框定位固定需求,满足机器人精准定位要求;
22.2)定位之后抓取位置固定,零部件受力点均匀,避免零件变形;
23.3)机器人按照预设的程序抓取零件,提高生产效率;
24.4)无需人工干预,避免人员安全隐患。
附图说明
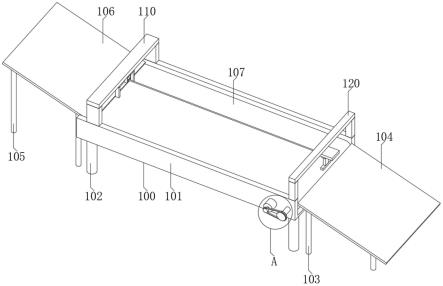
25.图1为本实用新型实施例提供的一种机器人自动抓取的精度料框的结构示意图;
26.图2为本实用新型实施例提供的一种机器人自动抓取的精度料框的另一视角的结构示意图。
27.其中:料框主体1、零部件2、压杆3、支架4、滑动轮5、球形定位装置6。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.如图1-2所示,本实用新型实施例提供一种机器人自动抓取的精度料框,包括料框主体1,料框主体1为正方体框架,该正方体侧面为三面框架一面开口且顶部开口,以便于将汽车零部件放置入料框且方便机械手从料框的侧面将零部件2取出;
30.料框主体1的内侧设置有支架4,支架4上放置有零部件2,支架4为内设在料框主体1上侧的三角形支架和底部的矩形支架,三角形支架和矩形支架的上表面均设置有垫条防止零部件2划损,零部件2与支架4四处接触形成矩形接触面,零部件2放置到料框主体1中与支架4形成矩形接触面,运输和抓取时零部件2受力点稳定且不晃动,避免零部件2变形;
31.料框主体1的底部四角分别设置有球形定位装置6用以将料框主体1定位固定,球形定位装置6为底部球形碗状的凹面结构,其通过连接块安装在料框主体1的底部四角,四个球形定位装置6与外置的产线上件工位上的四个定位球相匹配,球形定位装置6的凹面结构包裹定位球,人工确认料框主体1放置到位,按下上件工位的确认按钮,产线上件工位的定位台自动升起,与料框底部球形定位装置6匹配,即球形定位装置6的凹面结构包裹定位球,料框定位完成后,机器人将按照预先设好的程序进行自动抓取,使用球形定位装置6,运用弧面导向助力,实现产线与料框的定位匹配,进而实现准确定位;
32.料框主体1的底部安装有滑动轮5,滑动轮5的水平面低于球形定位装置6的水平面,以便于将未固定在产线上件工位即工作台上的料框主体1推动,如将料框主体1移动至产线上料工位,转运方便。
33.料框主体1的内侧壁横向设置有压紧件用以将零部件2侧面接触压紧,压紧件为压杆3,压杆3的一端与通过转轴与料框主体1转动连接,其另一端与搭在料框主体1内侧壁上
设置的搭块上,零部件2与压杆3一处接触,确认料框推送到位后,将料框主体1的压杆3翻起,确保零件可被顺利抓出,零部件2与压杆3一处接触增加零部件2的受力点保证均匀受力,同时可侧面压住零部件2,防止其晃动而变形。
34.工作原理:1)将料框主体1推送至上件工位处,确认料框主体1推送到位后,将料框主体1的压杆3翻起,确保零部件2可被顺利抓出,按下上件工位的确认按钮;
35.2)产线上件工位的定位台自动升起,与料框底部球形定位装置6匹配,料框主体1定位完成后,机器人将按照预先设好的程序进行自动抓取。
36.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
技术特征:
1.一种机器人自动抓取的精度料框,包括料框主体,所述料框主体的内侧设置有支架,所述支架上放置有零部件,其特征在于:所述料框主体的底部设置有球形定位装置与产线上件工位的定位球配合用以将料框主体定位固定。2.根据权利要求1所述的机器人自动抓取的精度料框,其特征在于:所述料框主体为正方体框架,该正方体侧面为三面框架一面开口且顶部开口。3.根据权利要求2所述的机器人自动抓取的精度料框,其特征在于:所述支架为内设在料框主体上侧的三角形支架和底部的矩形支架。4.根据权利要求3所述的机器人自动抓取的精度料框,其特征在于:所述三角形支架和矩形支架的上表面均设置有垫条防止零部件划损。5.根据权利要求1所述的机器人自动抓取的精度料框,其特征在于:所述球形定位装置为底部球形碗状的凹面结构,其通过连接块安装在料框主体的底部四角。6.根据权利要求5所述的机器人自动抓取的精度料框,其特征在于:四个所述球形定位装置与外置的产线上件工位上的四个定位球相匹配,球形定位装置的凹面结构包裹定位球。7.根据权利要求1所述的机器人自动抓取的精度料框,其特征在于:所述料框主体的底部安装有滑动轮,所述滑动轮的水平面低于球形定位装置的水平面。8.根据权利要求1所述的机器人自动抓取的精度料框,其特征在于:所述料框主体的内侧壁横向设置有压紧件用以将零部件侧面接触压紧。9.根据权利要求8所述的机器人自动抓取的精度料框,其特征在于:所述压紧件为压杆,所述压杆的一端与通过转轴与料框主体转动连接,其另一端与搭在料框主体内侧壁上设置的搭块上。10.根据权利要求1-9任意一项所述的机器人自动抓取的精度料框,其特征在于:所述零部件与支架四处接触形成矩形接触面,所述零部件与压杆一处接触从而稳定放置。
技术总结
本实用新型提供一种机器人自动抓取的精度料框,包括料框主体,所述料框主体的内侧设置有支架,所述支架上放置有零部件,所述料框主体的底部设置有球形定位装置与产线上件工位的定位球配合用以将料框主体定位固定,所述料框主体为正方体框架,该正方体侧面为三面框架一面开口且顶部开口,所述支架为内设在料框主体上侧的三角形支架和底部的矩形支架,本实用新型通过设置的球形定位装置与工作台相匹配,能够实现产线料框定位固定需求,满足机器人精准定位要求,定位之后抓取位置固定,零部件受力点均匀,避免零件变形,机器人按照预设的程序抓取零件,提高生产效率,无需人工干预,避免人员安全隐患。避免人员安全隐患。避免人员安全隐患。
技术研发人员:苏畅 来灿军 马彦丰 彭玉满
受保护的技术使用者:北京亚太汽车底盘系统有限公司
技术研发日:2022.09.16
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。