1.本实用新型涉及实验室环境安全防护装置,具体是涉及一种实验室环境下化学药品遗落点的标定装置。
背景技术:
2.实验室是一个复杂的场所,经常用到各种化学药品和仪器设备,以及水、电、燃气,还会遇到高温、低温、高压、真空和带有辐射源的实验室条件和仪器,如缺乏必要的安全管理和防护知识,会造成生命和财产的巨大损失,由此可见,实验室的安全关乎实验室人员的生命安全,实验室的安全防护是十分重要的。
3.实验室中存在化学药品遗落时会产生安全隐患,因此需要进行检查并对化学药品遗落点进行标定处理,传统的实验室标定过程通过人力完成,耗费时间,并且只能进行局部检查并标定,稍有遗漏实验室环境内的危险可能随时发生,且人力检查存在危险性。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种全自动、全方位对实验室环境下化学药品遗落点进行标定的标定装置。
5.技术方案:为解决上述问题,本实用新型采用一种实验室环境下化学药品遗落点的标定装置,包括车体、驱动车体运动的车体驱动装置、标定支撑装置,所述标定支撑装置包括连接装置、坐标定位器、容纳若干坐标定位器的容纳仓、第三电动伸缩杆、伸缩杆驱动装置,所述连接装置连接容纳仓和车体,且容纳仓随着车体的运动而运动,所述容纳仓底部设置支撑坐标定位器的薄膜,所述第三电动伸缩杆通过伸缩杆驱动装置设置于容纳仓开口上方,第三电动伸缩杆延伸方向平行于容纳仓延伸方向,所述第三电动伸缩杆伸长时挤压薄膜,使薄膜脱离容纳仓,此时坐标定位器从容纳仓中掉落。
6.进一步的,还包括标定覆盖装置,所述标定覆盖装置包括覆盖物、夹持覆盖物的机械手爪、驱动机械手爪运动的标定覆盖驱动装置,所述标定覆盖驱动装置设置于车体上。
7.进一步的,所述标定覆盖驱动装置包括第四电动伸缩杆、驱动电机,所述第四电动伸缩杆固定端固定连接于车体上,所述驱动电机固定端固定连接于第四电动伸缩杆输出端,且驱动电机输出轴延伸方向垂直于第四电动伸缩杆延伸方向,所述机械手爪与驱动电机输出轴连接,且机械手爪夹持面垂直于驱动电机输出轴延伸方向。
8.进一步的,所述连接装置包括第一电动伸缩杆、第二电动伸缩杆,所述第一电动伸缩杆一端固定连接于车体上,第一电动伸缩杆另一端与第二电动伸缩杆的一端固定连接,所述容纳仓固定连接于第二电动伸缩杆的另一端,所述第一电动伸缩杆延伸方向垂直于第二电动伸缩杆延伸方向,且第二电动伸缩杆沿竖直方向延伸。
9.进一步的,所述容纳仓包括若干容纳单元,每个容纳单元中容纳一个坐标定位器,每个容纳单元底部设置独立的薄膜。
10.进一步的,所述伸缩杆驱动装置包括标定电机、连接板,所述标定电机固定设置于
容纳仓上端中心,且容纳单元围绕标定电机均匀设置,所述连接板一端连接标定电机输出端,连接板另一端连接第三电动伸缩杆,所述标定电机输出轴沿竖直方向延伸,标定电机带动第三电动伸缩杆切换作用的容纳单元。
11.进一步的,还包括设置于车体前端的摄像装置,所述摄像装置用于摄取实验室化学药品遗落情况的图像。
12.进一步的,所述车体上还设置有报警器,所述报警器用于在摄像装置摄取到化学药品遗落图像时发出报警声。
13.进一步的,所述车体驱动装置包括对称分布于车体两侧的四个麦克纳姆轮。
14.进一步的,所述坐标定位器底部设置吸盘,且顶端设置定位器。
15.有益效果:本实用新型相对于现有技术,其显著优点是通过标定支撑装置释放坐标定位器实现全自动、全方位标定,有效避免实验室产生安全隐患,并且节省人力和时间,避免人为标定存在的危险性。通过标定覆盖装置将遗落的化学药品进行覆盖,避免化学药品污染实验室环境带来安全隐患。设置报警器有助于实验人员及时发现化学药品遗落。
附图说明
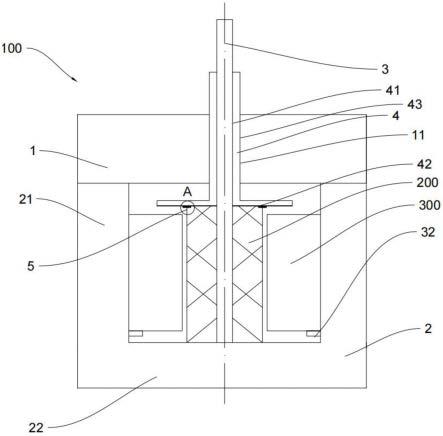
16.图1是本实用新型标定装置的结构示意图;
17.图2是本实用新型标定装置的侧视图;
18.图3是本实用新型标定装置的俯视图;
19.图4是本实用新型中标定支撑装置的结构示意图;
20.图5是本实用新型中坐标定位器位于容纳仓中的结构示意图;
21.图6是本实用新型中标定覆盖驱动装置连接机械手爪的结构示意图;
22.图7是本实用新型中联轴器连接车体驱动电机和车轮的剖视图。
具体实施方式
23.如图1至图3所示,本实施例中的一种实验室环境下化学药品遗落点的标定装置,包括车轮1,车体2,前置摄像头3,标定支撑装置4,标定覆盖驱动装置5,覆盖物6,报警装置7,控制与信息传输模块8,电源9。
24.本实用新型标定装置适用于对实验室环境下对化学药品遗落点进行标定,车体驱动装置包括对称分布于车体2两侧的四个麦克纳姆轮,麦克纳姆轮是一种可全方位移动的全向轮,由轮毂和围绕轮毂的辊子组成,麦克纳姆轮循迹小车在进行任意方向运作的时候,每个轮子的运动方向是不同的,每个麦轮都需要一个单独的电机驱动,基于麦克纳姆轮的循迹小车,可轻松实现前行、横移、斜行、旋转及其组合等运动方式,实现小车在实验室环境的正常移动与运输。
25.车体2为铝合金材料,可以减少使用过程中的磨损,延长装置的使用寿命,轻质耐用,并且增加了装置的稳定性。车体内部为车体驱动电机201和联轴器202,车体上前端焊接了标定支撑装置4和标定覆盖驱动装置5,胶接了前置摄像头4,车体上方通过胶接的方式固定控制与信息传输模块8和电源9,通过胶接的方式固定了报警装置7。
26.如图7所示,车体驱动电机201采用螺丝固定于车体2内部,通过线缆与电源9相连,通电后驱动电机201通过与联轴器202和车轮1连接,当电源开关打开后驱动电机开始工作,
标定装置的速度为0.05米/秒,保证标定过程中装置能够正常移动。
27.摄像装置3为前置摄像头,前置摄像头通过一根轴固定在车体2上,前置摄像头通过线缆的方式与电源9相连,保证前置摄像头的正常工作,同时其通过无线信号传输的方式与控制与信息传输模块8相连,操作过程中计算机端将前置摄像头的工作指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过无线传输的形式控制前置摄像头的工作,并将其实时拍摄到的实验室环境影像数据发送到计算机端,便于实时拍摄记录实验室的化学药品遗落情况。
28.如图4所示,标定支撑装置4包括连接装置,连接装置包括第一电动伸缩杆401、第二电动伸缩杆402,第一电动伸缩杆401一端通过焊接的方式与伸长杆一端相连,伸长杆另一端通过焊接的方式与车体2相连接,第一电动伸缩杆输出端通过焊接与第二电动伸缩杆402一端相连,其通过线缆与电源9相连、通过控制线与控制与信息传输模块8相连,操作过程中计算机将第一电动伸缩杆401工作指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过控制线控制第一电动伸缩杆401的伸缩,第一电动伸缩杆401以0.05米/秒的速度伸缩,从而实现标定装置能够准确移动在化学药品遗落点的位置上方。
29.第二电动伸缩杆402一端通过焊接的方式与第一电动伸缩杆401相连接,第一电动伸缩杆401延伸方向垂直于第二电动伸缩杆402延伸方向,且第二电动伸缩杆402沿竖直方向延伸,第二电动伸缩杆402输出端焊接伸长杆与容纳仓406相连接,其通过线缆与电源9相连、通过控制线与控制与信息传输模块8相连,操作过程中计算机将第二电动伸缩杆402工作指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过控制线控制第二电动伸缩杆402的伸缩,第二电动伸缩杆402以0.05米/秒的速度伸缩,使容纳仓406能够准确的移动到化学药品遗落点位置上方。
30.连接板403一端焊接在标定电机405一侧,连接板403下方焊接第三电动伸缩杆404,随着标定电机405的工作,连接板403转动带动第三电动伸缩杆作圆周运动,切换第三电动伸缩杆404切换作用的容纳单元。第三电动伸缩杆404输出端通过焊接的方式连接于连接板403的下方,且第三电动伸缩杆404沿竖直方向延伸,第三电动伸缩杆404另一端连接一个带有锥度的尖端,第三电动伸缩杆404伸长进入容纳仓406,并挤压容纳仓406底部的薄膜,使容纳仓406底部的薄膜脱落,第三电动伸缩杆404通过线缆与电源9相连、通过控制线与控制与信息传输模块8相连,操作过程中计算机将第三电动伸缩杆404工作指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过控制线控制第三电动伸缩杆404的伸缩,第三电动伸缩杆404以0.03米/秒的速度伸缩,使坐标定位器407能够掉落在标定位置处。
31.容纳仓406通过焊接伸长杆固定在第二电动伸缩杆402的输出端,容纳仓406有八个容纳单元围绕标定电机405均匀圆周分布,容纳单元孔内分别装有坐标定位器407,容纳单元底端均有一层薄膜,且每个容纳单元底部薄膜相互独立,容纳单元底部设置薄膜以防止坐标定位器407掉落。
32.标定电机405通过螺栓固定在容纳仓406的上方中心,标定电机405输出端与连接板403相连接,标定电机405输出轴沿竖直方向延伸,标定电机405通过线缆与电源9相连,通电后标定标定电机405工作带动连接板403转动。同时标定标定电机405也与控制与信息传输模块8通过控制线相连接,操作过程中计算机将指令经无线信号传输到控制与信息传输
模块8,控制与信息传输模块8再通过控制线控制标定标定电机405的启动工作,调整控制标定标定电机405的转动来实现薄片180度范围内的旋转,转动速度为15转/分,转动180度需要2秒。
33.如图5所示,坐标定位器407位于容纳仓406内,且位于容纳仓406底部薄膜的上方,坐标定位器407底端为一吸盘,使得掉落时能准确吸附在化学药品的遗落点处,坐标定位器上端有gps定位,能将位置信息准确发送给计算机端,同时通过无线信号传输的方式与控制与信息传输模块8相连。当第三电动伸缩杆404伸长,尖端挤压薄膜,薄膜脱落,使得坐标定位器407能够顺利落在标定的位置,同时无线信号的形式把标定的地理位置数据传输给控制与信息传输模块8,然后控制与信息传输模块8通过无线信号传输形式将其传输到计算机端。
34.如图6所示,标定覆盖装置包括覆盖物6、夹持覆盖物的机械手爪505、驱动机械手爪运动的标定覆盖驱动装置5,标定覆盖驱动装置5包括第四电动伸缩杆501、联轴器502、驱动电机503、连接轴504。
35.第四电动伸缩杆501一端通过焊接的方式与伸长杆相连接,伸长杆另一端通过焊接的方式与车体2相连接,第四电动伸缩杆输出端通过螺栓固定了驱动电机503,第四电动伸缩杆501通过线缆与电源9相连、通过控制线与控制与信息传输模块8相连,操作过程中计算机将第四电动伸缩杆501工作指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过控制线控制第四电动伸缩杆501的伸缩,第四电动伸缩杆501以0.05米/秒的速度伸缩,从而实现标定覆盖驱动装置能够准确的将覆盖物覆盖在化学药品遗落点上。
36.驱动电机503通过螺栓固定在第四电动伸缩杆501输出端的前端,驱动电机503输出端与联轴器502相连,通过线缆与电源9相连,通电后驱动电机503工作带动联轴器502转动,联轴器502连接连接轴504,连接轴504采用铝合金材料,可以减少使用过程中的磨损,连接轴504一端与联轴器502相连接,另一端通过焊接的方式与机械手爪505相连接,起到连接联轴器502与机械手爪505的作用。驱动电机503也与控制与信息传输模块8通过控制线相连接,操作过程中计算机将指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过控制线控制驱动电机503的启动工作,调整控制驱动装置电机502的转动来实现机械手爪180度范围内的转动,转动速度为15转/分,转动180度需要2秒。
37.机械手爪505采用铝合金材料,可以减少使用过程中的磨损,通过线缆与电源9相连,通电后机械手爪505工作夹取覆盖物6或准确放置覆盖物,同时机械手爪505与控制与信息传输模块8通过控制线相连接,操作过程中计算机将指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过控制线控制机械手爪505的启动工作,实现夹取或放置覆盖物。覆盖物6采用铝合金材料,可以减少使用过程中的磨损,覆盖物准确的覆盖在化学药品的遗落点处,实现标记的作用。
38.报警器7通过胶接的方式固定在车体2上方,通过线缆与电源9相连,保证报警器7的正常工作,且通过控制线与控制与信息传输模块8连接,前置摄像头3采集到实验室内存在化学药品遗落的不安全图像时,则将报警器7工作的信息通过无线信号传输方式经控制与信息传输模块8传输给报警器7,报警器7发出警报声。
39.控制与信息传输模块8通过胶接的方式固定于车体2的上方,第一电动伸缩杆401、第二电动伸缩杆402、第三电动伸缩杆404、标定电机405、第四电动伸缩杆501、驱动电机503
和机械手爪505都是通过控制线的方式与其相连,坐标定位器407和前置摄像头3通过无线方式与其相连。
40.电源9通过胶接的方式固定于车体2的上方。采用7.4v2200mah锂电池,提高倍率性能,明显降低了循环过程的动态内阻增幅,提高装置的动力输出;前置摄像头3、第一电动伸缩杆401、第二电动伸缩杆402、第三电动伸缩杆404、标定电机405、第四电动伸缩杆501、驱动电机503、机械手爪505和报警器7都是通过线缆的方式与其相连,电源9是整个标定装置的供电部分。
41.上述标定装置在实验室环境进行实时、全面的监测并进行化学药品遗落点进行坐标标定。具体步骤如下:
42.首先将实验室环境下化学药品遗落点标定装置放置到实验室环境的指定位置处,使得前置摄像头对准实验室内的环境,然后接通电源,打开计算机。打开装置的电源9的开关,驱动电机201给装置提供动力,小车按0.05m/s的速度进行移动且前置摄像头开始监测实验室内的环境,装置进入实验室,前置摄像头3通过控制线将化学药品遗落点的信息传输到控制与信息传输模块8再经无线信号传输技术将信息传输至计算机端,计算机端将标定支撑装置4工作信息通过无线方式经控制与信息传输模块8传输给标定支撑装置4,通过第一电动伸缩杆401、第二电动伸缩杆402进行伸缩来调整容纳仓406的位置使得坐标定位器正对遗落点,第三电动伸缩杆404伸缩挤压薄膜脱落使得坐标定位器407落在标定位置处,完成标定的整个过程。计算机端将标定覆盖装置工作信息通过无线方式经控制与信息传输模块8传输给标定覆盖装置,通过第四电动伸缩杆501伸缩、驱动电机503工作带动连接轴504转动使得机械手爪夹取的覆盖物6正对标定位置,机械手爪松开使得覆盖物掉落在标定位置上方,覆盖过程完成,当前置摄像头3采集到实验室内存在化学药品遗落的不安全的图像时,则将报警器7工作的信息通过无线信号传输方式经控制与信息传输模块8传输给报警器7,报警器7发出警报声。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。