基于光线追踪的dem冲积扇提取方法
技术领域
1.本发明属于地形地貌制图领域,涉及冲积扇提取技术,具体涉及一种基于光线追踪的dem冲积扇提取方法。
背景技术:
2.地形地貌图是地理、地质、气象乃至生物、水文等科学研究的重要数据源,同时也是实现合理土地利用的基础,为城市建设和国家发展提供重要参考。因此,一套数据准确、体系完善、类型丰富、尺度多样的地形地貌图,对学术界、社会和国家都具有重要价值。
3.冲积扇为山地河流出山口进入平坦地区后,因河床坡度骤减,水流搬运能力大为减弱,部分挟带的碎屑物堆积下来,形成从出口顶点向外辐射的扇形堆积体。其上沿与山体相接、下沿与平原相连;扇体表面虽与平原相比具有一定坡度、起伏度,但同时也较于山体更加平缓;形成了一种相对独立的地貌单元。不仅如此,冲积扇下沿缓和的表面、肥沃的土壤,适合用于城市建设和农业耕作。然而,冲积扇兼具山体和平原的特征,下沿更往往直接与平原相融,基于传统的地形因子的分类结果往往比较破碎,割裂了扇体的整体性,难以实现完整的提取。实地测量和人工目视解译虽然可以做到精确识别,但在国家、全球这样的大尺度制图下,需要花费大量的人力物力财力,效率堪忧。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,提供一种基于光线追踪的dem冲积扇提取方法,能够实现在各种地形地貌条件下,对中小型冲积扇进行自动、快速、完整、准确地识别,从而有效地辅助地貌制图,显著减少人工负担。
5.技术方案:为实现上述目的,本发明提供一种基于光线追踪的dem冲积扇提取方法,包括如下步骤:
6.s1:基于dem制作反地形dem,并且进行投影;
7.s2:基于光线追踪方法,采用设定的较小的太阳高度角a对投影完的反地形dem 分别从四个方向求取山体阴影,并对结果依据其是否可视进行重分类,划分出山体与冲积扇混合部分;
8.s3:采用设定的较大的太阳高度角b对投影完的反地形dem再进行一次步骤s2 的光线追踪,划分出山体部分;
9.s4:将步骤s2的山体与冲积扇混合部分和步骤s3的山体部分进行叠加分析,提取出冲积扇。
10.进一步地,所述步骤s1中制作反地形dem的步骤如下:
11.a1:读取dem,并依据栅格数据集属性读取dem的最大值;
12.a2:使用“栅格计算器”求取反dem。具体方法有以下两种:1、使用步骤101 中得到的den最大值与原dem相减;2、使用大于dem最大值的一个极大值(如9999) 与原dem相减。两种方法任选其一即可。
13.进一步地,所述步骤s1中采用投影栅格的方式进行投影,具体为:使用投影栅格工具;根据原数据地理位置和需求选择合适的输出坐标系,重采样技术选择为双线性插值法,进行投影即可。
14.进一步地,所述步骤s2具体为:
15.b1:使用山体阴影工具;方位角分别设置为45
°
、135
°
、225
°
和315
°
,对应实际中的东北、东南、西南、西北四个方向,太阳高度角根据坡度情况设置一个贴近地面、略高于平原坡度的较小值(可以设置为2
°
或1
°
),对投影的反地形dem求取山体阴影,得到四个山体阴影栅格数据集;
16.b2:分别对这四个山体阴影栅格数据集使用重分类工具进行重分类:将值为0(完全阴影的区域)的栅格保持为0;将值大于0(可视区域)的栅格重分类1;得到四个重分类山体阴影结果,可视区域的具体阈值为:0-999;
17.b3:使用栅格计算器工具将步骤b2中的四个重分类山体阴影结果相加;
18.b4:使用重分类工具对相加结果进行重分类:将值为4(四个预设方向上均可视) 的栅格重分类为平原,并给予相应分类编号,平原阈值为3.5-4;将值小于4(并非所有预设方向上均可视,即存在被遮挡)的栅格重分类为山体与冲积扇混合部分,并给予相应分类编号,山体阈值为0-3.5,划分出山体与冲积扇混合部分。
19.进一步地,所述步骤b4中需要对山体与冲积扇混合部分进行众数平滑,具体为:使用焦点统计工具进行众数平滑,具体参数设置如下:使用5
×
5的窗口,邻域选择为环形,内半径为1,外半径为3,单位类型选择像元;统计类型选择为众数;对划分结果重复平滑2-3次,直到结果符合实际。
20.进一步地,所述步骤s3具体为:
21.c1:参考步骤b1,采用一个相对较大、能包含所有山地的太阳高度角(可以设置为10
°
),按照同样的四个方位求取山体阴影,得到四个山体阴影数据集;
22.c2:对得到的山体阴影数据集重复步骤b2至步骤b4,划分出山体部分。
23.进一步地,所述步骤s4具体为:
24.d1:将步骤s2的山体与冲积扇混合部分和步骤s3的山体部分转为矢量数据,随后使用联合工具进行联合,联合后使用多部件至单部件工具将矢量面打散;
25.d2:筛选属性,属于步骤s2中但不属于步骤s3的结果的部分即为冲积扇候选区域。
26.考虑到如今冲积扇的自动化提取在地貌制图领域仍是一片空白,本发明提出一种基于光线追踪的dem冲积扇提取方法。光线追踪,是一种溯源视角下的区域光照判断方法,在视域分析、地形制图、城市热岛等领域都有着广泛运用,理论和算法都已成熟完备。然而,该方法在地貌分类上却鲜有使用,本发明考虑到山体和冲积扇的完整性问题,首次使用四方位山体阴影来进行山体提取。不仅如此,为了消除山体阴影对山脚附近平原区的影响,特别使用反地形来进行阴影计算,从而能够完整且准确地对山体范围进行识别。经过实验表明,由于大型的湿润性冲积扇下沿与平原地形特征甚是接近,难以准确识别扇体边界。因此,本发明主要针对更为典型的中小型冲积扇,为地貌制图提供高效、准确、完整的冲积扇识别、提取方案。
27.有益效果:本发明与现有技术相比,本发明受到光线追踪思想启发,并巧妙地利用反地形解决山体遮挡的影响,精确地识别出冲积扇的边界,从而能够完整地将冲积扇从山
体和平原中提取出来。同时,本发明以可获得的dem作为基础数据,应用广泛,算法高效、准确,为地貌制图中冲积扇的提取提供一种可靠的思路,无论是对于干旱区地貌研究,还是土地利用建设,都有着丰富的价值。
附图说明
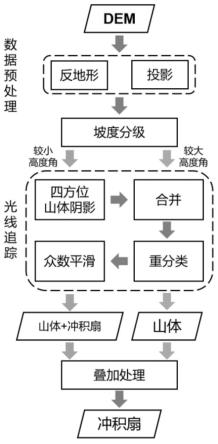
28.图1是本发明方法的流程图;
29.图2是实施例中待提取区域的dem数据示意图;
30.图3是实施例中待提取区域的投影后反地形dem数据示意图;
31.图4是实施例中重分类后的山体阴影二值化数据示例图;
32.图5是实施例中山体和冲积扇混合部分结果示例图;
33.图6是实施例中山体部分结果示例图;
34.图7是实施例冲积扇提取结果示例图。
具体实施方式
35.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
36.本发明提供一种基于光线追踪的dem冲积扇提取方法,如图1所示,其包括如下步骤:
37.s1:基于dem制作反地形dem,并且选取合适的坐标系进行投影:
38.s2:基于光线追踪方法,采用设定的太阳高度角a对投影完的反地形dem分别从四个方向求取山体阴影,并对结果依据其是否可视进行重分类,划分出山体与冲积扇混合部分;
39.s3:采用设定的太阳高度角b对投影完的反地形dem再进行一次步骤s2的光线追踪,划分出山体部分;
40.s4:将步骤s2的山体与冲积扇混合部分和步骤s3的山体部分进行叠加分析,提取出冲积扇。
41.基于上述方案,为了验证本发明方法的实际效果,本实施例中将本发明方法进行实例应用,具体如下:
42.本实施例选取了美国洛基山脉死亡谷中一块区域作为实验区域(具体如图2所示),该区域在地貌界中以拥有形状各异、类型丰富的冲积扇地貌而闻名。该实验区域主体为山地地区,山体附近广泛分布有形状各异的冲积扇,可以很好地验证本发明方法的效果。
43.参照图1,具体的实验过程如下:
44.1)基于dem制作反地形dem,并且选取合适的坐标系进行投影;
45.制作反地形dem的步骤为:
46.101)读取dem,并依据栅格数据集属性读取dem的最大值,约为4900多;
47.102)使用“栅格计算器”工具求取反dem,使用大于dem最大值的一个极大值(本实验中为9999)与原dem相减。
48.采用投影栅格的方式进行投影,具体步骤如下:
49.111)使用arcgis pro软件中的“投影栅格”工具;
50.112)选择输出坐标系为投影坐标系中的贝尔曼等积投影坐标系(即behrmann);
51.113)“重采样技术”选择为“双线性插值法”,进行投影即可,本实施例中最终投影反地形dem如图3所示。
52.2)基于光线追踪方法,采用较小的太阳高度角对投影完的反地形dem分别从四个方向求取山体阴影,并对结果依据其是否可视进行重分类,划分出山体与冲积扇混合部分。
53.具体包括如下步骤:
54.201)使用“山体阴影”工具,用较小的太阳高度角划分出山体和冲积扇混合部分;方位角分别设置为45
°
、135
°
、225
°
和315
°
,对应实际中的东北、东南、西南、西北四个方向,太阳高度角均设置为1
°
,对步骤1中投影的反地形dem求取山体阴影,得到四个山体阴影栅格数据集;
55.202)分别对这四个山体阴影栅格数据集使用arcgis pro中的“重分类”工具进行重分类:将值为0(完全阴影的区域,对应阈值为0)的栅格保持为0;将值大于0(可视区域,对应阈值设定为0-999)的栅格重分类1;得到四个重分类山体阴影结果,具体如图4所示;
56.203)使用“栅格计算器”工具将四个重分类山体阴影结果相加;
57.204)使用“重分类”工具对相加结果进行重分类:将值为4(四个预设方向上均可视),对应阈值为3.5-4的栅格重分类为平原,并给予其编号为0;将值小于4(并非所有预设方向上均可视,即存在被遮挡),对应阈值为0-3.5的栅格重分类为山体和冲积扇混合部分,并给予其编号为1,实现平原和山体的划分;
58.205)使用“焦点统计”工具进行众数平滑,具体参数设置如下:使用5
×
5的窗口,“邻域”选择为“环形”,“内半径”为1,“外半径”为3,“单位类型”选择像元;“统计类型”选择为众数。对划分结果重复平滑2-3次,直到结果符合实际,具体如图5所示。
59.3)参照步骤2,采用较大的太阳高度角对投影完的反地形dem再进行一次光线追踪,划分出山体。
60.具体的步骤如下:
61.301)使用“山体阴影”工具,用较大的太阳高度角划分出山体和冲积扇混合部分;本实施例中方位角分别设置为45
°
、135
°
、225
°
和315
°
,对应实际中的东北、东南、西南、西北四个方向,太阳高度角均设置为10
°
,对步骤1中投影的反地形dem求取山体阴影,得到四个山体阴影栅格数据集;
62.对以上四个山体阴影重复步骤202至步骤205,划分出山体部分,并将山体部分赋值为1,具体如图6所示。
63.4)将步骤2的混合部分与步骤3的山体部分进行叠加分析,提取出冲积扇。
64.叠加分析的步骤为:
65.401)先将步骤(2)和步骤(3)的结果使用“栅格转面”工具转为矢量数据,随后使用“联合”工具进行联合,联合后使用“多部件至单部件”工具将矢量面打散;
66.402)筛选属性,属于步骤(2)中但不属于步骤(3)的结果的部分即为冲积扇:在矢量结果中添加新字段“type”,使用筛选工具,将步骤2结果为1且步骤3结果也为 1的要素赋值为1(山体),将步骤2结果为1但步骤3结果为0的要素赋值为2(冲积扇),其余部分赋值为0(平原),并由人工对结果进行检查,最终结果如图7所示。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。