三电平pwm整流器快速调制及中点电位平衡控制方法
技术领域
1.本发明涉及电力电子电气设备及电气工程技术领域,特别涉及三电平pwm整流器快速调制及中点电位平衡控制方法。
背景技术:
2.多电平pwm整流器/逆变器在高压、大功率场合应用广泛,如有源电力滤波器、静止无功补偿器、大容量高压变频调速器等。其相应的脉宽调制(pulse width modulation,pwm)控制方法是多电平逆变器研究领域的核心问题之一。目前研究和应用最为普遍的两种方法是正弦载波调制(sinusoidal carrier-based modulation,spwm)和空间矢量脉宽调制法(space vector pulse width modulation,svpwm)。如果能找出spwm与swpvm之间的本质关系,通过简单易于实现的spwm调制方法来实现svpwm的调制效果,就能将svpwm应用推广到任意电平,充分利用svpwm调制优点。但目前对这两种调制方法之间的内在关系的研究仍未能得到深入的分析与认识。
3.现有技术中spwm载波调制方法操作简单,易于实现,便于多模块级联,但直流侧电压利用率不高,无法对直流侧电压进行控制。svpwm开关模型简单,便于微机实时控制,并且具有转矩脉动小、噪声低、电压利用率高等特点,而且还可以利用电压矢量的冗余状态来实现对直流侧电压的控制及降低开关损耗。但是当主电路电平数超过5时,往往由于电压矢量的冗余状态增加,算法过于复杂,使用较少。常规的三电平pwm整流器的调制技术主要有spwm和svpwm技术,三电平spwm技术实现简单,但对于中性点电位控制实现较困难。三电平svpwm因合成矢量多,计算工作量大。
技术实现要素:
4.本发明的目的是克服现有技术缺陷,提供三电平pwm整流器快速调制及中点电位平衡控制方法,在分析三电平pwm整流器的数学模型的基础上,提出了三电平pwm整流器的调制模型,相对于三电平变流器的svpwm调制技术,极大地减少了计算时间。
5.本发明的目的是这样实现的:一种三电平pwm整流器快速调制及中点电位平衡控制方法,包括以下步骤:
6.1)根据三电平pwm整流器的数学模型,基于此数学模型和九个开关管占空比的约束条件,建立三电平pwm整流器的调制模型,得到的调制模型为五个方程组成的方程组;
7.2)利用线性方程组的基础解系和特解,分解出调制过程的自由分量,适当选择不同的自由分量,得到不同的调制策略;
8.3)提出三个零电位开关占空比的交流成分应与三相电流同相位的控制策略;将具有四个自由度的不等式求解降为一个,最终确定了一个自由度的取值范围。
9.作为本发明的进一步限定,所述步骤1)具体包括:通过三电平的三个开关的占空比与控制电压的关系,得到占空比与控制电压的约束关系;在每相桥臂上的开关在某一时刻只能处于一个位置,得到占空比的约束条件,同时占空比满足在0~1的变化的条件;
10.根据控制电压约束条件和同一桥臂的三个开关的约束条件,得到调制模型为五个方程组成的方程组(1):
[0011][0012]
其中,s
α
为α坐标系下的调制系数,s
β
为β坐标系下的调制系数,s
ap
、s
bp
、s
cp
、s
an
、s
bn
、s
cn
、s
a0
、s
b0
、s
c0
为a桥臂正电平开关的占空比,b桥臂正电平开关的占空比,c桥臂正电平开关的占空比,a桥臂负电平开关的占空比,b桥臂负电平开关的占空比,c桥臂负电平开关的占空比,a桥臂零电平开关的占空比,b桥臂零电平开关的占空比,c桥臂零电平开关的占空比。
[0013]
作为本发明的进一步限定,所述步骤2)具体包括:方程组解的由通解和特解组成,解的一般结构如式(2),其中c1、c2、c3、c4为自由变量;式中等式右边前四项为通解,右边第五项为特解;
[0014][0015]
令得到九个开关的占空比方程(3),同时自由变量应满足(4):
[0016][0017][0018]
其中,s
x
、sy为根据s
α
、s
β
定义的中间变量。
[0019]
作为本发明的进一步限定,步骤3)中所述提出三个零电位开关占空比的交流成分应与三相电流同相位的控制策略具体包括:s
a0
、s
b0
、s
c0
用于中性点电压控制,直流侧上下电容的差值δuc应满足(5),将s
a0
、s
b0
、s
c0
变为交流量即式(6),利用式(7)进行pi调节后,即得到中性点电压的控制值式(8);
[0020][0021][0022][0023][0024]
至此得到了s'
a0
、s'b、0s'c,实际应用时需要转换成s
a0
、sb、0sc;其中,s'
a0
、sb'0、sc'0为零电平开关占空比s
a0
、s
b0
、s
c0
的中间变量,满足s'
a0
=1-s
a0
、sb'0=1-s
b0
、sc'0=1-s
c0
,s
a0
、s
b0
、s
c0
为零电平开关占空比,ia、ib、ic为三相电感电流,δuc为直流侧上下电容上的电压差值,i
δc
为中性点电压控制的电流量,k
pc
为中性点电压控制的比例调节系数,k
ic
为中性点电压控制的积分调节系数,im为三相电感电流的幅值。
[0025]
作为本发明的进一步限定,步骤3)中所述将具有四个自由度的不等式求解降为一个,最终确定了一个自由度的取值范围具体包括:在求得s
a0
、s
b0
、s
c0
后,对求c1的范围公式进行修改,c1应满足的约束条件为(9):
[0026][0027]
根据式(9)定义式(10)表示的变量s
l
、sh,得到c1的范围,即式(11)
[0028][0029]sl
≤c1≤shꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0030]
其中s
l
为,sh为自由变量c1的下限和上限值。
[0031]
本发明采用以上技术方案,与现有技术相比,有益效果为:本发明采用的是直接从数学模型出发求解占空比的调制过程,没有针对某一具体的调制算法,因此本发明具有通用性,可以统一常见的调制策略;本发明根据不等式约束,求解出调制结果,计算工作量小,速度快;本发明提出的中性点平衡控制策略,减少了三个零位置开关的占空比波动范围,从而为三电平pwm整流器电压或电流的控制提供了更大的空间。
附图说明
[0032]
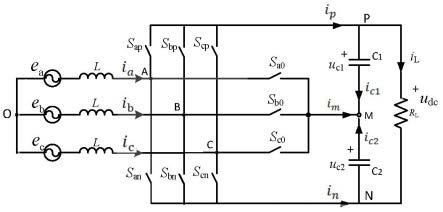
图1为实施例中所述的三电平pwm整流器主电路结构图。
[0033]
图2为实施例中s
a0
、s
b0
、s
c0
的波形图。
[0034]
图3为实施例中的九个开关的占空比波形图。
[0035]
图4为实施例中vienna整流器实现抑制中性点电位波动的效果图。
具体实施方式
[0036]
实施例中公开了一种三电平pwm整流器快速调制及中点电位平衡控制方法,包括以下步骤:
[0037]
1)三电平电路拓扑可以简化为如图1所示,同时图中标有各变量的定义及其正方向;在每相桥臂上的开关在某一时刻只能处于一个位置,即每桥臂开关为单刀三掷开关,因此图中的开关应满足式(1):
[0038][0039]
其中,s
ap
、s
bp
、s
cp
、s
an
、s
bn
、s
cn
、s
a0
、s
b0
、s
c0
为a桥臂正电平开关的占空比,b桥臂正电平开关的占空比,c桥臂正电平开关的占空比,a桥臂负电平开关的占空比,b桥臂负电平开关的占空比,c桥臂负电平开关的占空比,a桥臂零电平开关的占空比,b桥臂零电平开关的占空比,c桥臂零电平开关的占空比。
[0040]
图1中a、b、c三点相对于直流侧中性点m的电压可以表示为:
[0041][0042]
对电感列微分方程可得:
[0043][0044]
其中,ua=u
am
u
mo
,ub=u
bm
u
mo
,uc=u
cm
u
mo
;u
mo
为直流侧电容中心点m和电源中心点o之间的电压;ua、ub、uc为三相调制输出电压;利用三相系统的对称性,由于交流侧采用无中线连接的方式,不考虑零序电压的存在,对于三相对称满足ua ub uc=0,可得:
[0045][0046]
其中u
c1
为直流侧上侧电容上的电压,u
c2
为直流侧下侧电容上的电压,
[0047]sip
为s
ap
、s
bp
、s
cp
(i=a,b,c)的统一表示,s
in
为s
an
、s
bn
、s
cn
(i=a,b,c)的统一表示。结合式(2)、(3)、(4)可得:
[0048][0049]
暂时不考虑上下电容上的直流电压偏差,即假设电容c1和c2两端的电压u
c1
、u
c2
相等,即ua、ub、uc可表示为:
[0050][0051]
对于节点p、m、n可通过基尔霍夫定律分别得到如下关系:
[0052][0053][0054][0055]
为求直流侧输出电压的微分方程,假设c1=c2=c并利用u
dc
=u
c1
u
c2
,将式(7)和式(8)相加得:
[0056][0057]
为控制电容c1和c2上的电压相等,定义δuc=u
c1-u
c2
,将式(7)和式(8)相减得:
[0058][0059]
2)三电平pwm整流器利用和二电平pwm整流器相似的控制策略得到控制电压u
α
、u
β
,利用利用u
α
=s
αudc
,u
β
=s
βudc
,结合式(6)可得到s
α
、s
β
与s
ap
、s
an
、s
bp
、s
bn
、s
cp
、s
cn
之间的关系,可表示为:
[0060][0061]
其中,s
α
为α坐标系下的调制系数,s
β
为β坐标系下的调制系数。
[0062]
根据式(1)的约束条件,和式(12)联立方程,可以得到调制模型为5个方程组成的方程组,设由求解变量组成的向量为:[s
ap s
bp s
cp s
an s
bn s
cn s
a0 s
b0 s
c0
]
t
,联立的方程组用矩阵形式表示为:
[0063][0064]
容易验证式(13)表示的方程组的系数矩阵及增广矩阵的秩均为5,利用线性代数知识,方程组(13)有解;因为方程组中有九个未知数,而系数矩阵及增广矩阵的秩均为5,所以方程组的解有无穷多个,解的维数为4。方程组解的由通解和特解组成,解的一般结构为:
[0065][0066]
式中等式右边前4项为通解,c1、c2、c3、c4为自由变量;右边第5项为特解,为描述方便,令:s
x
、sy为s
x
、sy为根据s
α
、s
β
定义的中间变量,时式(14)可变为:
[0067][0068]
由于[s
ap s
bp s
cp s
an s
bn s
cn s
a0 s
b0 s
c0
]
t
中各变量的变化范围为0~1,由(15)可
以得到:
[0069][0070]
如果[s
ap s
bp s
cp s
an s
bn s
cn s
a0 s
b0 s
c0
]
t
中的各变量大于等于0,由式(1)可知,[s
ap s
bp s
cp s
an s
bn s
cn s
a0 s
b0 s
c0
]
t
中的各变量自然满足小于等于1的条件,式(16)可以简化为:
[0071][0072]
这样将调制问题转化为求解自由变量c1、c2、c3、c4的线性不等式组问题。
[0073]
3)但在实际运行中因元器件特性不完全一致、测量控制误差等原因,电容c1和c2上的电压不相等,这时控制效果会变差,甚至导致某些器件损坏,因此实际运行中必须进行中性点电压控制。
[0074]
根据因为ia ib ic=0始终成立,所以该公式右边的常数1对δuc的控制不起作用,这样上式变为:
[0075][0076]
由于δuc的极性不同,控制变量s
a0
、s
b0
、s
c0
的极性可能为正,也可能为负,因此s
a0
、s
b0
、s
c0
不适合直接作为控制变量,也就是说控制变量应具有交流特性。因为s
a0
、s
b0
、s
c0
变量同时加上某个值,不会改变控制效果,因此定义变量为s
0a
、
0bs0c
、s的平均值将s
0a
、
0bs0c
、s分别减去s0后即可变为交流量,即这样式(18)可以变为式(19):
[0077][0078]
式中令i
δc
=-s'
a0ia-sb'0i
b-sc'0ic,i
δc
为δuc总控制量。i
δc
通常由δuc经pi调节得到,见式(20):
[0079][0080]
式中k
pc
、k
ic
分别为比例和积分系数。当利用式(20)得到i
δc
后,为求解s'
a0
、sb'0、sc'0可能的结果会很多。
[0081]
本发明采取的策略是为达到同样的效果,应使s'
a0
、s'
b0
、s'
c0
的变化范围为最小,这样使得s
ap
、s
an
、s
bp
、s
bn
、s
cp
、s
cn
有更大的调节范围可以调节直流侧直流电压u
dc
。从i
δc
=-s'
a0ia-s'
b0ib-s'i
c0
可以看出,若将[s'
a0
、s'
b0
、sc'0]
t
和[ia、ib、ic]
t
看成两个向量,i
δc
可以看成这两个向量的内积。在i
δc
一定时,当[s'
a0
、s'
b0
、sc'0]
t
与[ia、ib、ic]
t
方向相同,即相互平行时,[s'
a0
、sb'0、sc'0]
t
的长度为最小,这样[s'
a0
、sb'0、sc'0]
t
可表示为式(21):
[0082][0083]
将式(21)代入到式(19),得到该式假设[ia、ib、ic]
t
为正弦交流量,并利用正弦函数的平方公式化简得到,这样得将k代入式(21)得到:
[0084][0085]
至此得到了sa'0、sb'0、sc'0,实际应用时需要转换成s
a0
、s
b0
、s
c0
,因为s
a0
、s
b0
、s
c0
是大于0的变量,需要将s'
a0
、s'
b0
、sc'0三个变量都加上一个正数来保证s
a0
、s
b0
、s
c0
≥0。
[0086]
由前述分析,s
a0
、s
b0
、s
c0
和s'
a0
、s'
b0
、sc'0之间的关系是:用矩阵形式表示为:
[0087][0088]
不难验算式(23)中的系数矩阵的秩为2,即由s'
a0
、sb'0、sc'0求解s
a0
、s
b0
、s
c0
的结果不唯一;此时应将方程转换为独立的二阶方程组,,将三相系统转换静止两相系统,即
[0089][0090]
定义s'
x
、s'y变量如下:
[0091][0092]
令s
c0
为自由变量,则式(25)可简化为:
[0093][0094]
假设s
a0
、s
b0
、s
c0
的最大值为s
0max
,由s
a0
、s
b0
、s
c0
的约束条件得:
[0095][0096]
由式(27)可得到s
c0
的约束条件,即:
[0097][0098]
定义:其中s'
l
、s'h为自由变量s
c0
的下限和上限值。由此可得到s
c0
应满足的条件为:
[0099]
s'
l
≤s
c0
≤s'hꢀꢀꢀꢀꢀꢀ
(30)
[0100]
取代入公式(26),即可得到所需要的结果。
[0101]
图2为s
0m
=0.1时本方法的结果,图2(a)为s'
l
、s'h曲线波形图,图2(b)为s
a0
、s
b0
、s
c0
曲线波形图,可以看出此时的s
a0
、s
b0
、s
c0
的限幅值s
0max
减小到即可以将s
a0
、s
b0
、s
c0
动态范围缩小到方法1的0.866倍。
[0102]
在求得s
a0
、s
b0
、s
c0
后,求c1的范围公式也应修改,这时可将式(17)改为:
[0103][0104]
根据式(31),定义s
l
、sh为:
[0105][0106]
根据s
l
≤c1≤sh条件求出c1后,代入式(15),即可求s
ap
、s
an
、s
bp
、s
bn
、s
cp
、s
cn
,至此可以得到九个开关的占空比。
[0107]
图3为中性点电压平衡时的三电平pwm整流器的九个占空比波形图,图3(a)为s
ap
、s
bp
、s
cp
的波形图,图3(b)为s
an
、s
bn
、s
cn
的波形图,图3(c)为s
a0
、s
b0
、s
c0
的波形图,其中s
a0
、s
b0
、s
c0
在0.1附近波动,波动由电容电压的纹波电压引起,平均值为0.1,对δuc总体无控制作用。
[0108]
采用本发明的中性点电压平衡控制算法后,波形如图4所示。图(a)为电容电压和直流侧总电压波形,从图(a)可以看出,经过0.02s后,两电容上的电压相等。图(b)为s
a0
、s
b0
、s
c0
波形图。
[0109]
本发明方法根据三电平pwm整流器的数学模型,利用与二电平pwm整流器的相似的控制算法,得到需要的电压,基于此数学模型和九个开关管占空比的约束条件,建立了三电平pwm整流器的调制模型,得出四个自由变量的求解占空比的不等式组。分别在考虑中性点电压平衡和不平衡的情况下,建立了求解不等式组的方法。针对中性点电压不平衡,提出了三个零电位开关占空比的交流成分应与三相电流同相位的控制策略,在控制效果相同的条件下,减小了三个零电位开关占空比的变化范围。
[0110]
本发明并不局限于上述实施例,在本发明公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。