1.本发明涉及自动控制系统的技术领域,尤其涉及一种用于柔性机构的电磁驱动控制系统,以及这种用于柔性机构的电磁驱动控制系统所采用的方法。
背景技术:
2.随着社会和科技的发展,工程中新材料、新设备、新结构和新施工工艺的运用,结构向高(深)、轻、大这三个方向发展,在某些领域中结构形式也由原来的刚性结构转变为柔性结构。柔性机构利用铰链代替刚性机构的运动副,使构建数目、机构重量、加工装配的时间和费用等都相对降低,同时也具有减少机构之间的间隙、摩擦、磨损、润滑,提高机构精度和稳定性,降低维护成本等优点。
3.但由于柔性机构变形实现的运动行程有限,存在轴漂和寄生误差,长时间使用可能出现蠕变和应力松弛,从而出现仪器的长时间使用导致仪器精度减小的问题。并且在数学模型上柔性结构的表现为刚度小、柔性大、应变力与形变位移量呈非线性关系,在计算方法上柔性结构的问题与刚性结构也不相同,应力大小较难计算,因此传统的机械驱动方式不易达到较为精确的位移控制。
技术实现要素:
4.为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种用于柔性机构的电磁驱动控制系统,其具有足够的算力和性能,使运动系统进行实时有效的控制,能够避免机构磨损、润滑等问题,延长机构的使用寿命。
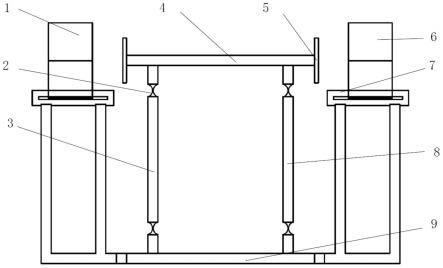
5.本发明的技术方案是:这种用于柔性机构的电磁驱动控制系统,其包括:左磁铁(1)、柔性单元(2)、刚性左竖杆(3)、刚性横杆(4)、磁性材料(5)、右磁铁(6)、位移传感器(7)、刚性右竖杆(8)、基座(9);
6.刚性左竖杆、刚性右竖杆分别立在基座的左右两侧上,在刚性左竖杆上下两端、刚性右竖杆上下两端各设置一个柔性单元,每个柔性单元通过刚性结构连接到刚性横杆或基座,刚性横杆的左右两端分别设置一个磁性材料,左磁铁与刚性横杆左端的磁性材料间隔距离d设置在该磁性材料的左侧,右磁铁与刚性横杆右端的磁性材料间隔距离d设置在该磁性材料的右侧,在左磁铁、右磁铁的附近分别设有位移传感器。
7.本发明刚性左竖杆、刚性右竖杆分别立在基座的左右两侧上,在刚性左竖杆上下两端、刚性右竖杆上下两端各设置一个柔性单元,每个柔性单元通过刚性结构连接到刚性横杆或基座,这样构成一种以柔性单元作为关键的传动部分的类似平行四边形形变原理的简易柔性机构,刚性横杆的左右两端分别设置一个磁性材料,左磁铁与刚性横杆左端的磁性材料间隔距离d设置在该磁性材料的左侧,右磁铁与刚性横杆右端的磁性材料间隔距离d设置在该磁性材料的右侧,在左磁铁、右磁铁的附近分别设有位移传感器,电磁驱动电路作用后柔性机构将会产生位移变化,利用嵌入式系统,将单片机作为系统的主控,利用其足够的算力和性能,对运动系统进行实时有效的控制,将传统的运动控制方式用电磁驱动的无
接触式运动控制系统取代,能够避免机构磨损、润滑等问题,延长机构的使用寿命。
8.还提供了一种用于柔性机构的电磁驱动控制系统的工作方法,其包括以下步骤:
9.(1)按下方向键;
10.(2)控制器识别位移量,当柔性结构的位移量出现偏差时,控制器会产生相应的控制作用去消除偏差,使得位移控制更准确;
11.(3)采用pwm技术和pid控制技术对电磁铁的电压进行闭环控制,通过应用pid算法对电压输出的占空比进行精确的计算,进而达到精确调压的目的;
12.(4)控制开关的通断,输出不同占空比的脉冲信号,输出对应电流值;
13.(5)由继电器控制左右两个电磁铁单独工作,将位移量设定为右正左负,当位移量为正时,继电器不工作,开关始终处于右边位置,右边的电磁铁持续受到单片机的控制;当位移量为负时,单片机向继电器的引脚输出信号,继电器工作,开关处于左边位置,则此时左边的电磁铁工作,右边的电磁铁关闭,从而达到控制目的;
14.(6)电磁铁作用吸引柔性单元;
15.(7)柔性单元产生位移变化;
16.(8)位移传感器检测到位移变化;
17.(9)当偏差小于指定值时,由芯片控制电压,使其电压不改变,避免发生死循环。
附图说明
18.图1是根据本发明的用于柔性机构的电磁驱动控制系统的柔性单元的一个实施例的结构示意图。
19.图2是根据本发明的用于柔性机构的电磁驱动控制系统的主视图。
20.图3是根据本发明的用于柔性机构的电磁驱动控制系统的立体图。
21.图4是根据本发明的用于柔性机构的电磁驱动控制系统的位移变化图。
22.图5是根据本发明的用于柔性机构的电磁驱动控制系统的柔性单元的另一个实施例的结构示意图。
具体实施方式
23.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
24.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“包括”以及任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他步骤或单元。
25.如图1所示,是本实施例的柔节结构图,根据结构力学可知,在力的作用下直圆形柔性铰链的刚度计算公式为:
[0026][0027]
式中:
[0028][0029]
γ=r/t;
[0030]
其中e:材料的弹性模量,pa;
[0031]
b:柔性铰链的宽度,mm;
[0032]
r:柔性铰链的切割半径,mm;
[0033]
t:柔性铰链的厚度,mm。
[0034]
如图2、3所示,这种用于柔性机构的电磁驱动控制系统,其包括:左磁铁1、柔性单元2、刚性左竖杆3、刚性横杆4、磁性材料5、右磁铁6、位移传感器7、刚性右竖杆8、基座9;
[0035]
刚性左竖杆、刚性右竖杆分别立在基座的左右两侧上,在刚性左竖杆上下两端、刚性右竖杆上下两端各设置一个柔性单元,每个柔性单元通过刚性结构连接到刚性横杆或基座,刚性横杆的左右两端分别设置一个磁性材料,左磁铁与刚性横杆左端的磁性材料间隔距离d设置在该磁性材料的左侧,右磁铁与刚性横杆右端的磁性材料间隔距离d设置在该磁性材料的右侧,在左磁铁、右磁铁的附近分别设有位移传感器。
[0036]
本发明刚性左竖杆、刚性右竖杆分别立在基座的左右两侧上,在刚性左竖杆上下两端、刚性右竖杆上下两端各设置一个柔性单元,每个柔性单元通过刚性结构连接到刚性横杆或基座,这样构成一种以柔性单元作为关键的传动部分的类似平行四边形形变原理的简易柔性机构,刚性横杆的左右两端分别设置一个磁性材料,左磁铁与刚性横杆左端的磁性材料间隔距离d设置在该磁性材料的左侧,右磁铁与刚性横杆右端的磁性材料间隔距离d设置在该磁性材料的右侧,在左磁铁、右磁铁的附近分别设有位移传感器,电磁驱动电路作用后柔性机构将会产生位移变化(如图4所示),利用嵌入式系统,将单片机作为系统的主控,利用其足够的算力和性能,对运动系统进行实时有效的控制,将传统的运动控制方式用电磁驱动的无接触式运动控制系统取代,能够避免机构磨损、润滑等问题,延长机构的使用寿命。
[0037]
优选地,所述磁性材料是铁片或软磁铁。
[0038]
优选地,所述刚性结构为刚性杆。
[0039]
优选地,在基座的左侧、右侧各设有一个双层支架,每个双层支架的前层、后层的顶端设有一个位移传感器。采用这样的结构,能够保证位移测量更加准确可靠。
[0040]
优选地,所述柔性单元为柔性铰链或薄簧片。如图5所示,是本实施例的柔性铰链替换图,由于目前市面上加工水平的限制,柔性铰链采用数控机床精密加工,柔性铰链的最小厚度t也很难加工到0.2mm,并且难以保证其精度,因此柔性铰链的立体结构难以实现。利用锻造的方式,对金属原料进行捶打和挤压将其加工成薄片,因此将原来立体的柔性铰链用薄的簧片形式进行平替。
[0041]
优选地,所述柔性单元采用铍青铜材料,刚性左竖杆、刚性横杆、刚性右竖杆、基座为铝合金材质(刚度较大,质地轻盈)。
[0042]
优选地,所述位移传感器为电位器式传感器。
[0043]
优选地,所述左磁铁、右磁铁为稳压直流电磁铁。
[0044]
利用嵌入式系统,将单片机作为系统的主控,利用其足够的算力和性能,对运动系统进行实时有效的控制。驱动模块设计为电磁驱动,对柔性机构进行驱动控制。以动镜系统的柔性支撑结构为例,将传统的运动控制方式用电磁驱动的无接触式运动控制系统取代。
[0045]
其工作原理为:当在通电螺线管内部插入铁芯后,铁芯被通电螺线管的磁场磁化。磁化后的铁芯变成一个磁体,由于两个磁场互相叠加,从而使螺线管的磁性增强,进而产生磁力。
[0046]
通电螺线管中的铁芯通常用铁磁性材料制成,以使铁芯更容易磁化,与此同时,为了让电磁铁断电立即消磁,往往采用消磁较快的软铁或者硅钢材料来制作。这类电磁铁只在通电时有磁力,断电立即消磁,将其作为本设计中的驱动模块,能轻松达到即停即启的要求,符合设计初衷。电磁铁有交流电磁铁和直流电磁铁,考虑到控制的稳定性以及电源的成本,稳压直流电磁铁比较符合本设计要求。
[0047]
根据电磁学可知,电磁铁的磁力计算公式为:
[0048][0049]
其中φ:工作气隙磁通,wb;
[0050]
b:工作气隙磁感应强度,t;
[0051]
μ0:真空磁导率,其值为4π*10-7
wb/a
·
m;
[0052]
s:截面积,m2。
[0053]
本发明控制器部分采用高性能、低功耗、低成本的stm32f103系芯片。
[0054]
还提供了一种用于柔性机构的电磁驱动控制系统的工作方法,其包括以下步骤:
[0055]
(1)按下方向键;
[0056]
(2)控制器识别位移量,当柔性结构的位移量出现偏差时,控制器会产生相应的控制作用去消除偏差,使得位移控制更准确;
[0057]
(3)采用pwm技术和pid控制技术对电磁铁的电压进行闭环控制,通过应用pid算法对电压输出的占空比进行精确的计算,进而达到精确调压的目的;
[0058]
(4)控制开关的通断,输出不同占空比的脉冲信号,输出对应电流值;
[0059]
(5)由继电器控制左右两个电磁铁单独工作,将位移量设定为右正左负,当位移量为正时,继电器不工作,开关始终处于右边位置,右边的电磁铁持续受到单片机的控制;当位移量为负时,单片机向继电器的引脚输出信号,继电器工作,开关处于左边位置,则此时左边的电磁铁工作,右边的电磁铁关闭,从而达到控制目的;
[0060]
(6)电磁铁作用吸引柔性单元;
[0061]
(7)柔性单元产生位移变化;
[0062]
(8)位移传感器检测到位移变化;
[0063]
(9)当偏差小于指定值时,由芯片控制电压,使其电压不改变,避免发生死循环。
[0064]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。