1.本实用新型涉及实验室技术领域,特别是涉及一种智控型通风柜。
背景技术:
2.现有技术用于实验室的通风柜,使用时拉门的升降、水接头和气接头的通断,以及照明灯的开关等均需通过工作人员手动控制。
3.然而实验时,工作人员手持各种仪器或材料,以及为了安全考虑,工作人员的手部不便于进行实验外的其他操作,例如控制拉门升降和各种开关,从而造成实验过程的不便,影响实验效果和效率,缺乏实用性。
技术实现要素:
4.为了克服现有技术的不足,本实用新型目的在于提供一种智控型通风柜,通过设置由声控模块、脚踏开关、肘击触摸开关和控制器组成的控制装置,在解放双手的情况下,可以快速方便的根据实际情况选择声控模块、脚踏开关或肘击触摸开关控制拉门升降,以及水接头、气接头和照明灯具的打开或关闭,实现智能化控制,使实验过程方便快捷,提升实验的效果和效率。
5.为解决上述问题,本实用新型所采用的技术方案如下:
6.一种智控型通风柜,包括通风柜本体和拉门,其特征在于,所述通风柜本体的内部从上至下通过隔板分隔为实验区和置物区;所述实验区的口部设置有对称的导向槽;所述拉门与导向槽间隙配合;
7.所述通风柜本体上设置有用于控制拉门沿导向槽相对实验区升降的拉门升降机构;所述拉门升降机构包括导轮组、绳子、配重锤和绕绳器;
8.所述实验区内设置有水接头、气接头和照明灯具;与所述水接头和气接头连接的管路上分别设置有第一阀门和第二阀门;
9.所述通风柜本体上还设置有控制装置;所述绕绳器、第一阀门、第二阀门和照明灯具与控制装置电性连接。
10.优选的,所述导轮组左右对称设置于通风柜本体的顶部;所述配重锤位于通风柜本体的背部,且通过导轨副与通风柜上下滑动连接;所述绕绳器位于配重锤的下方,且与通风柜本体固定连接;所述绳子的其中一端与拉门固定连接,另一端绕过导轮组后与配重锤固定连接;所述绕绳器与配重锤之间通过绕绳固定连接。
11.优选的,所述控制装置包括控制器和控制机构;
12.所述控制机构包括声控模块、肘击触摸开关和脚踏开关;所述声控模块设置与实验区的前部上方;所述肘击触摸开关位于实验区的口部一侧;
13.所述肘击触摸开关设置有多个,通过控制器分别与第一阀门、第二阀门、照明灯具和拉门升降机构电性连接;
14.所述脚踏开关设置有多个,通过控制器分别与第一阀门、第二阀门、照明灯具和拉
门升降机构电性连接;
15.所述声控模块通过控制器分别与第一阀门、第二阀门、照明灯具和拉门升降机构电性连接。
16.优选的,所述导向槽的外侧分别设置有上限位传感器和下限位传感器;所述拉门的下端一侧设置有与挡片;
17.所述上限位传感器和下限位传感器与绕绳器电性连接。
18.优选的,所述导轮组包括前导轮和后导轮;所述前导轮设置有多个。
19.优选的,所述第一阀门和第二阀门为电磁阀。
20.优选的,所述实验区内设置有云台摄像头。
21.相比现有技术,本实用新型的有益效果在于:
22.该实用新型通过设置由声控模块、脚踏开关、肘击触摸开关和控制器组成的控制装置,在解放双手的情况下,可以快速方便的根据实际情况选择声控模块、脚踏开关或肘击触摸开关控制拉门升降,以及水接头、气接头和照明灯具的打开或关闭,实现智能化控制,使实验过程方便快捷,提升实验的效果和效率。
附图说明
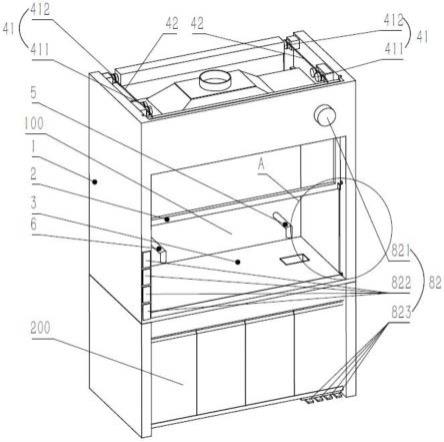
23.图1为本实用新型的立体结构示意图;
24.图2为本实用新型的主视图;
25.图3为本实用新型的后视图;
26.图4为图1中a处局部放大示意图;
27.图5为本实用新型的控制原理图;
28.其中:通风柜本体1、拉门2、隔板3、拉门升降机构4、水接头5、气接头6、照明灯具7、控制装置8、云台摄像头9、第一阀门10、第二阀门20、挡片21、上限位传感器30、下限位传感器40、导轮组41、绳子42、配重锤43、绕绳器44、控制器81、控制机构82、实验区100、导向槽101、置物区200、前导轮411、后导轮412、声控模块821、肘击触摸开关822、脚踏开关823。
具体实施方式
29.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳的实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容的理解更加透彻全面。
30.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”、“上”、“下”、“前”、“后”以及类似的表述只是为了说明的目的。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
32.下面,结合附图以及具体实施方式,对本实用新型做进一步描述:
33.如图1-5所示,一种智控型通风柜,包括通风柜本体1和拉门2,其特征在于,所述通风柜本体1的内部从上至下通过隔板3分隔为实验区100和置物区200;所述实验区100的口部设置有对称的导向槽101;所述拉门2与导向槽101间隙配合;
34.所述通风柜本体1上设置有用于控制拉门2沿导向槽101相对实验区100升降的拉门升降机构4;所述拉门升降机构4包括导轮组41、绳子42、配重锤43和绕绳器44;
35.所述实验区100内设置有水接头5、气接头6和照明灯具7;与所述水接头5和气接头6连接的管路上分别设置有第一阀门10和第二阀门20;
36.所述通风柜本体1上还设置有控制装置8;所述绕绳器44、第一阀门10、第二阀门20和照明灯具7与控制装置8电性连接。
37.在该实施例中,通过在通风柜本体1上设置控制装置8,控制绕绳器44运行来实现拉门2的升降,分别控制第一阀门10和第二阀门20的通断来实现水接头5和气接头6的打开或关闭,以及控制照明灯具7打开或关闭。
38.进一步的,如图1、3所示,所述导轮组41左右对称设置于通风柜本体1的顶部;所述配重锤43位于通风柜本体1的背部,且通过导轨副与通风柜上下滑动连接;所述绕绳器44位于配重锤43的下方,且与通风柜本体1固定连接;所述绳子42的其中一端与拉门2固定连接,另一端绕过导轮组41后与配重锤43固定连接;所述绕绳器44与配重锤43之间通过绕绳固定连接。
39.在该实施例中,当需要拉门2上升时,通过控制装置8控制绕绳器44正向转动卷绕绳,驱动配重锤43沿着导轨副相对通风柜本体1向上移动,从而在导轮组41合绳子42的作用下实现拉门2上升,直至上升至设定高度时,则通过控制装置8控制绕绳器44停止转动即可;反则,当需要拉门2下降时,通过控制装置8控制绕绳器44反向转动即可。
40.进一步的,如图1、3、5所示,所述控制装置8包括控制器81和控制机构82;
41.所述控制机构82包括声控模块821、肘击触摸开关822和脚踏开关823;所述声控模块821设置与实验区100的前部上方;所述肘击触摸开关822位于实验区100的口部一侧;
42.所述肘击触摸开关822设置有多个,通过控制器81分别与第一阀门10、第二阀门20、照明灯具7和拉门升降机构4电性连接;
43.所述脚踏开关823设置有多个,通过控制器81分别与第一阀门10、第二阀门20、照明灯具7和拉门升降机构4电性连接;
44.所述声控模块821通过控制器81分别与第一阀门10、第二阀门20、照明灯具7和拉门升降机构4电性连接。
45.在该实施例中,所述声控模块821内设置有对应指令的控制程序,当需要通过声控模块821控制拉门2升降时,工作人员只需喊出“拉门上升”、“拉门下降”和“拉门停止”指令,然后声控模块821接收对应指令后通过控制器81控制绕绳器44正向/反向转动或停止;当需要通过声控模块821控制水接头5、气接头6打开或关闭时,工作人员只需喊出“水接头5打开”、“水接头5关闭”、“气接头打开”和“气接头关闭”指令,然后声控模块821接收对应指令后通过控制器81控制第一阀门10、第二阀门20通断;当需要通过声控模块821控制水接头5、气接头6打开或关闭时,工作人员只需喊出“水接头打开”、“水接头关闭”、“气接头打开”和“气接头关闭”指令,然后声控模块821接收对应指令后通过控制器81控制第一阀门10、第二
阀门20通断;当需要通过声控模块821控制照明灯具7打开或关闭时,工作人员只需喊出“开灯”或“关灯”指令,然后声控模块821接收对应指令后通过控制器81控制照明灯具7开打或关闭;
46.在该实施例中,当需要通过肘击触摸开关822控制拉门2升降时,肘式双击对应肘击触摸开关822,则表示拉门2上升(通过控制器81控制绕绳器44正向转动),继续肘式双击,则表示拉门2停止移动(通过控制器81控制绕绳器44停止转动);肘式单击对应肘击触摸开关822,则表示拉门2下降(通过控制器81控制绕绳器44反向转动),继续肘式单击,则表示拉门2停止移动(通过控制器81控制绕绳器44停止转动)。
47.当需要通过肘击触摸开关822控制水接头5或气接头6时,肘式双击对应肘击触摸开关822,则表示水接头5或气接头6打开(通过控制器81控制第一阀门10或第二阀门20打开),继续肘式双击,则表示水接头5或气接头6关闭(通过控制器81控制第一阀门10或第二阀门20关闭)。
48.当需要通过肘击触摸开关822控制照明灯具7时,肘式双击对应肘击触摸开关822,则表示照明灯具7打开(通过控制器81控制照明灯具7打开),继续肘式双击,则表示照明灯具7关闭(通过控制器81控制照明灯具7关闭)。
49.在该实施例中,当需要通过脚踏开关823控制拉门2升降时,踩踏两下对应脚踏开关823,则表示拉门2上升(通过控制器81控制绕绳器44正向转动),继续踩踏两下,则表示拉门2停止移动(通过控制器81控制绕绳器44停止转动);踩踏一下对应脚踏开关823,则表示拉门2下降(通过控制器81控制绕绳器44反向转动),继续踩踏一下,则表示拉门2停止移动(通过控制器81控制绕绳器44停止转动)。
50.当需要通过脚踏开关823控制水接头5或气接头6时,踩踏两下对应脚踏开关823,则表示水接头5或气接头6打开(通过控制器81控制第一阀门10或第二阀门20打开),继续踩踏两下,则表示水接头5或气接头6关闭(通过控制器81控制第一阀门10或第二阀门20关闭)。
51.当需要通过脚踏开关823控制照明灯具7时,踩踏两下对应脚踏开关823,则表示照明灯具7打开(通过控制器81控制照明灯具7打开),继续踩踏两下,则表示照明灯具7关闭(通过控制器81控制照明灯具7关闭)。
52.通过设置由声控模块821、脚踏开关823、肘击触摸开关822和控制器81组成的控制装置8,实现在解放双手的情况下,可以快速方便的根据实际情况选择声控模块821、脚踏开关823或肘击触摸开关822控制拉门2升降,以及水接头5、气接头6和照明灯具7的打开或关闭,使实验过程方便快捷,提升实验的效果和效率。
53.进一步的,如图4所示,所述导向槽101的外侧分别设置有上限位传感器30和下限位传感器40;所述拉门2的下端一侧设置有与挡片21;
54.所述上限位传感器30和下限位传感器40与绕绳器44电性连接。
55.在该实施例中,当上限位传感器30监测到挡片21时,则控制绕绳器44停止或反向转动;当当下限位传感器40监测到挡片21时,则控制绕绳器44停止或正向转动,从而可以有效防止绕绳器44驱动拉门2超行程移动,损坏拉门2。
56.进一步的,如图1所示,所述导轮组41包括前导轮411和后导轮412;所述前导轮411设置有多个。
57.在该实施例中,通过上述结构设置,不仅可以使拉门2在任意位置的定位更可靠,而且拉门2的移动更加轻便、稳定。
58.进一步的,所述第一阀门10和第二阀门20为电磁阀。
59.在该实施例中,所述第一阀门10和第二阀门20采用电磁阀,可以提升水接头5和气接头6打开或关闭的灵敏度和可靠性。
60.进一步的,如图2所示,所述实验区100内设置有云台摄像头9。
61.在该实施例中,通过云台摄像头9的设置,可以实时监测并记录工作人员实验时的步骤和动作,以便学习或纠错。
62.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本实用新型专利权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。