1.本实用新型涉及健身器材的领域,具体为一种握力器握把调节结构。
背景技术:
2.随着时代的进步,以及人们对力量训练要求的提高,握力器是用于训练手或前臂的肌肉强度的一种健身器材,常见的握力器包括一对握把和在阻碍握把的接近运动的方向上施加力的弹性件,弹性件包括弹性主体及由所述弹性主体两端分别延伸形成的两个弹性脚,普通的a型握力器因无法调节力度已经无法满足更多健身人士的需求。目前,虽然普通的a型握力器结构简单,使用灵活,得到广大人群的喜爱,但是,大多数的a型握力器的握力大小不能调节,不能适应不同人群的需要,不能满足人们对a类握力器通用性的要求。
3.为了适应不同人群的需要,可将握力器的弹性脚和握把之间设置为可以拆卸的,弹簧插入手柄的深度越深,杠杆越短,握力变大;弹簧插入手柄的深度越浅,杠杆越长,握力变轻,这样就可以充分利用力学中杠杆原理来调节使用者所需的握力,从而达到调节握力的目地。
4.然而,传统的可调节握力的握力器无法让使用者准确得知调节后的握力的具体数值,且在调整手柄与弹簧的相对位置后,进行固定时需要利用螺丝等部件来锁紧,操作较为繁琐。
5.为了解决上述问题,本领域工作人员对握力器握把调节结构进行了不同的研究:
6.中国专利公开号为cn212593701u公开了一种握力器握把调节结构,包括在一扭簧的两端分别形成扭臂,握把包括固定柄前端连接活动柄,活动柄中部形成穿槽,固定柄前端形成可穿入穿槽中进行转动的连接段,连接段前端形成的连接头上设有一定位孔,一限位钉穿入定位孔中,穿槽前端形成供连接头穿入限位的第一区间,第一区间经一段导斜面后形成第二区间,扭臂上设有至少两个限位盲孔,限位钉的底部在扭臂移动时落入盲孔中,连接头在连接段转动作用下逐步向前进入或后退出穿槽的第一区间,限位钉在前进时经导斜面后限位至第一区间中并卡紧盲孔,限位钉在后退时沿着导斜面进入第二区间并脱离出盲孔。本实用新型可对握力器的握把进行调节,改变扭臂力矩,方便使用者调节力度大小。然而,在该技术方案中,通过活动柄转动,调节扭臂插入握把的深度,这种方法在具体使用时,由于受力较小,握住活动柄进行旋转转动时比较费力,且不易拧紧,容易松动,且扭臂的调整距离必须是在限位盲孔上,调整局限性较高。
7.因此有必要对握力器握把调节结构进行进一步的改进,以解决上述问题。
技术实现要素:
8.本技术的目的:在于解决和克服现有技术和应用的不足,提供一种握力器握把调节结构,有效解决调节握力器握把时操作繁琐以及调节不便的问题,在满足不同人群使用的同时,结构简单,操作简便,稳固耐用,适合推广使用。
9.本技术的目的是通过如下技术方案来完成的,一种握力器握把调节结构,包括:
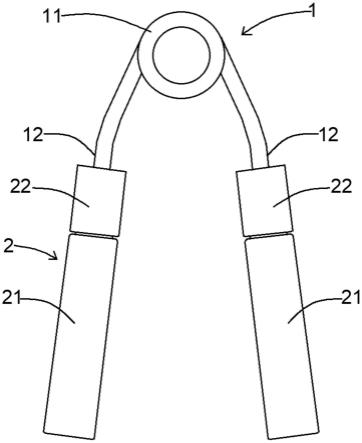
10.弹性件,所述弹性件包括弹性主体及由所述弹性主体两端分别延伸形成的两个弹性脚;两个握把两个所述弹性脚,两个握把两个所述弹性脚分别依次穿设于两个所述握把中;
11.所述握把包括上握把以及下握把;所述上握把与下握把通过螺纹连接;其中:
12.所述上握把下端与中空柱体连接;在所述中空柱体的外表面设有外螺纹以及锁紧件;所述锁紧件位于外螺纹的下方;
13.所述下握把内部设有与所述外螺纹相匹配的内螺纹;所述内螺纹下方设有与所述锁紧件相匹配的锁紧面。
14.所述上握把内部的中空结构与弹性脚结构相匹配;弹性脚为圆角矩形结构。
15.优选地,所述中空柱体至少由两片圆弧形钢片围绕中空柱体圆心构成,且每片圆弧形钢片之间具有间隙。
16.优选地,所述下握把通过内螺纹与外螺纹相配合,在所述中空柱体上进行往复运动。
17.优选地,所述弹性脚上刻有相对应的握力值。
18.优选地,所述锁紧件为中空的倒圆台结构。
19.优选地,所述锁紧面为从上至下向握把圆心方向倾斜的斜面。
20.优选地,所述锁紧面下方设有逼空环。
21.本技术与现有技术相比,至少具有以下明显优点和效果:
22.1、在本实用新型中,下握把通过内螺纹与外螺纹相配合,在中空柱体上进行往复运动。当下握把往上运动时,锁紧面抵靠锁紧件,由于锁紧面向握把圆心倾斜,通道变窄,使得锁紧件往中空柱体的圆心方向移动,进而锁紧弹性脚。当下握把往下运动时,锁紧面远离锁紧件,使得锁紧件恢复正常状态,进而可调整弹性脚在握把内的距离。弹性脚插入握把的深度越深,杠杆越短,握力变大,反之握力变小,利用杠杆原理来调节使用者所需握力,达到握力可调的目的,使握力器满足不同人群的使用需要,提高了实用性,且握力器操作起来十分便捷,解决了调节握力器时操作繁琐的问题。
23.2、在本实用新型中,上握把内部的中空结构与弹性脚结构相匹配,弹性脚为圆角矩形结构,弹性脚无法在上握把中进行转动,只能通过下握把进行转动,由于握住下握把时的受力面大,且弹性脚无法在上握把中进行转动,转动下握把相对容易,从而提升了用户体验感。
附图说明
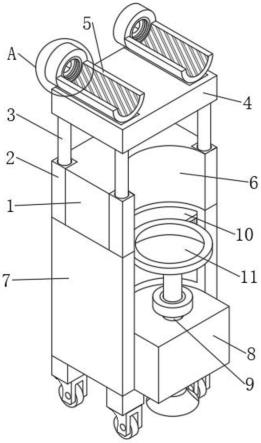
24.图1是本技术的整体结构布置图。
25.图2是本技术中的爆炸图。
26.图3是本技术中下握把远离上握把的结构示意图。
27.图4是本技术中握把夹紧弹性脚的结构示意图。
28.图5是本技术中上握把的俯视图。
29.本技术中的附图标记:
30.弹性件1、弹性主体11、弹性脚12、握把2、下握把21、内螺纹211、锁紧面212、逼空环213、上握把22、中空柱体221、外螺纹222、圆弧形钢片2221、间隙2222、锁紧件223、上握把中
空结构224。
具体实施方式
31.结合附图和以下说明描述了本技术的特定实施例以教导本领域技术人员如何制造和使用本技术的最佳模式。为了教导申请原理,已简化或省略了一下常规方面。本领域技术人员应该理解源自这些实施例的变形落在本技术的范围内。本领域技术人员应该理解下述特征能够以各种方式结合以形成本技术的多个变型。本技术中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。由此,本技术并不局限于下述特定实施例,而仅由权利要求和它们的等同物限定。
32.图1至图5示出,本技术的一种握力器握把调节结构的一种具体实施例,包括:弹性件1,弹性件1包括弹性主体11及由弹性主体11两端分别延伸形成的两个弹性脚12,两个握把2两个弹性脚12分别依次穿设于两个握把2中。握把2包括上握把22以及下握把21,上握把22与下握把21通过螺纹连接,上握把22下端与中空柱体221连接。在中空柱体221的外表面设有外螺纹222以及锁紧件223;锁紧件223位于外螺纹222的下方;中空柱体221至少由两片圆弧形钢片2221围绕中空柱体221圆心构成。下握把21内部设有与外螺纹222相匹配的内螺纹211,内螺纹211下方设有与锁紧件223相匹配的锁紧面212。上握把中空结构224与弹性脚12结构相匹配。本实用新型有效解决调节握力器握把2时操作繁琐以及调节不便的问题,在满足不同人群使用的同时,结构简单,操作简便,稳固耐用,适合推广使用。
33.如图1所示,在本技术实施例中,一种握力器握把调节结构,包括:弹性件1,所述弹性件1包括弹性主体11及由所述弹性主体11两端分别延伸形成的两个弹性脚12;两个握把2两个所述弹性脚12,两个握把2两个所述弹性脚12分别依次穿设于两个所述握把2中;弹性脚12插入握把2的深度越深,杠杆越短,握力变大,反之握力变小,利用杠杆原理来调节使用者所需握力,达到握力可调的目的,使握力器满足不同人群的使用需要,提高了实用性。
34.需要说明的是,如图2至图4所示,在本技术实施例中,握把2包括上握把22以及下握把21,上握把22与下握把21通过螺纹连接,上握把22下端与中空柱体221连接;在中空柱体221的外表面设有外螺纹222以及锁紧件223,锁紧件223位于外螺纹222的下方,同时锁紧件223位于中空柱体221的端部。中空柱体221至少由两片圆弧形钢片2221围绕中空柱体221圆心构成,且每片圆弧形钢片2221之间具有间隙2222,在本实施例申请中,圆弧形钢片2221优选为3片,圆弧形钢片2221在收到外力作用时可向圆心处偏移,进而可以夹紧弹性脚12。通过圆弧形钢片2221的设置,具有结构简单的特点。锁紧件223为中空的倒圆台结构,且上圆台直径大于下圆台的直径,外螺纹222的直径大于上圆台的直径。
35.应当说明的是,如图2至图4所示,在本技术实施例中,下握把21内部设有与外螺纹222相匹配的内螺纹211,内螺纹211下方设有与锁紧件223相匹配的锁紧面212,锁紧面212为从上至下向握把圆心方向倾斜的斜面,与锁紧件223相匹配。下握把21通过内螺纹211与外螺纹222相配合,在中空柱体221上进行往复运动。当下握把21往上运动时,锁紧面212抵靠锁紧件223,由于锁紧面212向握把圆心倾斜,通道变窄,使得锁紧件223往中空柱体221的圆心方向移动,进而锁紧弹性脚12。当下握把21往下运动时,锁紧面212远离锁紧件223,使得锁紧件223恢复正常状态,进而可调整弹性脚12在握把内的距离。
36.进一步需要说明的,如图1、图2、图5所示,在本技术实施例中,上握把中空结构224与弹性脚12结构相匹配;弹性脚12为圆角矩形结构。弹性脚12无法在上握把22中进行转动,只能通过下握把21进行转动,由于握住下握把21时的受力面大,且弹性脚12无法在上握把22中进行转动,转动下握把21相对容易,从而提升了用户体验感。弹性脚12上刻有相对应的握力值,便于使用者根据需求调整相对应握力值,达到良好的锻炼效果。锁紧面212下方设有逼空环213,减少了空气阻力,有利于调整弹性脚12在握把内的距离。
37.本实用新型在使用时:首先,将对下握把21进行转动,使得下握把21往下运动,当下握把21往下移动时,锁紧面212远离锁紧件223,弹性脚12可在握把2上进行上下运动,此时,使用者可根据弹性脚12上的握力值,调整行弹性脚12在握把2的距离;随后对下握把21进行反方向转动,使得下握把21往上运动,锁紧面212抵靠锁紧件223,由于锁紧面212向握把2圆心倾斜,通道变窄,使得锁紧件223往中空柱体221的圆心方向压缩变紧,进而锁紧弹性脚12。弹性脚12插入握把的深度越深,杠杆越短,握力变大,反之握力变小,利用杠杆原理来调节使用者所需握力,达到握力可调的目的,使握力器满足不同人群的使用需要,提高了实用性,且握力器操作起来十分便捷,本实用新型有效解决调节握力器握把2时操作繁琐以及调节不便的问题,在满足不同人群使用的同时,结构简单,操作简便,稳固耐用,适合推广使用。
38.由于本领域技术人员能够很容易想到,利用申请的构思和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。