1.本公开涉及清洁技术领域,特别涉及一种清洁设备。
背景技术:
2.目前市面上大部分洗地机产品在前进时靠手臂前推和滚刷向前滚动,向后只能靠手臂后拉,用户在长时间清洁时会产生疲劳,随着清水桶、污水桶的容积逐渐增加,机身的重量也在不断增加,用户的推拉洗地机的负担会越来越大。
技术实现要素:
3.本公开为了解决现有技术中存在的问题,提供了一种清洁设备。
4.本公开的第一方面提供了一种清洁设备,包括:
5.地刷组件,所述地刷组件被构造为用于清洁工作面;
6.滚轮组件,所述滚轮组件被构造为受控于驱动机构,带动所述地刷组件在工作面上往复行走;
7.手柄组件,所述手柄组件包括手柄本体以及导向配合在所述手柄本体上的握持部,还包括位于手柄本体与所述握持部之间的检测装置;初始状态下,所述握持部被构造为向第一方向运动时触发所述检测装置发出推力信号,以及初始状态下,向第二方向运动时触发所述检测装置发出拉力信号;其中,所述握持部相对于手柄本体往第一方向或第二方向运动的行程为微位移;
8.控制单元,所述控制单元基于所述推力信号,控制所述滚轮组件带动所述地刷组件向前运动;以及基于所述拉力信号,控制所述滚轮组件带动所述地刷组件向后运动。
9.在本公开一个实施方式中,所述握持部往第一方向或第二方向发生微位移的行程为5毫米以下。
10.在本公开一个实施方式中,所述握持部包括第一受力件、第二受力件,所述检测装置设置在所述第一受力件和第二受力件之间;所述第一受力件被构造为在所述握持部受到向前的推力时,通过发生微位移触发所述检测装置发出推力信号;所述第二受力件被构造为在所述握持部受到向后的拉力时,通过发生微位移触发所述检测装置发出拉力信号。
11.在本公开一个实施方式中,所述第一受力件、第二受力件被构造为沿垂直于所述手柄本体的延伸方向运动,以分别触发所述检测装置。
12.在本公开一个实施方式中,所述第一受力件位于手柄本体上面向用户的一侧;所述第二受力件位于手柄本体上背向用户的一侧。
13.在本公开一个实施方式中,所述检测装置包括应变片;
14.所述第一受力件被配置为,在推力作用下向靠近所述应变片的方向运动并挤压应变片发生在第一方向上的形变;
15.所述第二受力件被配置为,在拉力作用下向靠近所述应变片的方向运动并挤压应变片发生在第二方向上的形变;
16.所述应变片被配置为在第一方向或第二方向上的形变时发出推力信号或者拉力信号。
17.在本公开一个实施方式中,所述第一受力件、第二受力件固定连接在一起,且被构造为在第二受力件受到拉力或者在第一受力件受到推力时,第一受力件、第二受力件相对于手柄本体整体运动。
18.在本公开一个实施方式中,所述第一受力件具有第一延伸部,所述第二受力件具有与所述第一延伸部固定连接的第二延伸部,所述手柄本体上设置有导向通孔,所述第一延伸部和/或所述第二延伸部穿入所述导向通孔中,并与所述导向通孔导向配合在一起。
19.在本公开一个实施方式中,所述第一受力件与所述手柄本体之间设置有第一密封垫;所述第一密封垫被构造为用于密封所述第一受力件与所述手柄本体;所述第一受力件被构造为挤压第一密封垫变形以触发所述检测装置,以及在所述第一密封垫的弹性作用力下复位。
20.在本公开一个实施方式中,在所述第二受力件与所述手柄本体之间设置有第二密封垫,所述第二密封垫被构造为用于密封所述第二受力件与所述手柄本体;所述第二受力件被构造为挤压第二密封垫变形以触发所述检测装置,以及在所述第二密封垫的弹性作用力下复位。
21.在本公开一个实施方式中,所述第一受力件被构造为与所述手柄本体至少部分表面具有相适配的形状,所述第一密封垫设置在所述第一受力件与所述手柄本体的整个表面之间;所述第一延伸部穿过所述第一密封垫、手柄本体并与所述第二延伸部固定连接在一起。
22.在本公开一个实施方式中,所述第一受力件上设置有第一抵压部,所述第二受力件上设置有第二抵压部;所述第一抵压部和所述第二抵压部分别位于所述应变片的相对两侧;所述应变片固定在所述手柄本体上,所述第一抵压部、第二抵压部被配置为分别挤压所述应变片在两个方向上发生变形。
23.在本公开一个实施方式中,在所述第一受力件、第二受力件与所述手柄本体之间还设置有止位机构,所述止位机构被构造为限制所述第一受力件、第二受力件相对于手柄本体的运动行程。
24.在本公开一个实施方式中,在所述第二受力件与所述手柄本体之间设置有弹性部,所述第二受力件被构造为受到拉力时挤压所述弹性部发生变形,以及在拉力消失时在弹性部的作用下复位。
25.在本公开一个实施方式中,所述弹性部、第一密封垫在未受力状态时,所述第二受力件与手柄本体之间具有往推力方向、拉力方向运动的微位移行程。
26.在本公开一个实施方式中,所述第一受力件、第二受力件在推力、拉力作用下运动的微位移行程均为1毫米以下。
27.在本公开一个实施方式中,所述手柄本体包括配合在一起的第一手柄盖和第二手柄盖,所述第一手柄盖和所述第二手柄盖围成内腔,所述第二手柄盖上设置有与所述内腔连通的开口;所述第一受力件设置在所述第一手柄盖的外侧,所述第二受力件设置在所述手柄组件的内腔中,并通过所述开口露出。
28.在本公开一个实施方式中,所述握持部被配置为沿所述手柄本体的延伸方向运
动,所述握持部上具有第一触发部和第二触发部,所述第一触发部和第二触发部分别设置在所述检测装置的相对两侧,所述握持部被构造为向第一方向运动时触发所述检测装置发出推力信号,或者是向第二方向运动时触发所述检测装置发出拉力信号。
29.在本公开一个实施方式中,所述手柄组件还包括第一密封圈和第二密封圈,所述握持部在延伸方向的其中一端通过所述第一密封圈与手柄本体密封,另一端通过所述第二密封圈与手柄本体密封;所述握持部被构造为挤压所述第一密封圈往第一方向运动,或者挤压所述第二密封圈往所述第二方向运动。
30.本公开的一个有益效果在于,清洁设备通过手柄组件的握持部感应用户的施力方向,并基于力的方向控制滚轮组件辅助地刷组件前后运动,使得用户仅施加推力或拉力即可,不用施加握住握持部的力,更加符合人体工程力学,用户操作时更加省力;另外握持部相对于手柄本体的位移量小,用户在控制清洁设备移动时感知不到握持部的运动,从而提高了用户的使用体验。
31.通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
附图说明
32.被结合在说明书中并构成说明书的一部分的附图示出了本公开的实施例,并且连同其说明一起用于解释本公开的原理。
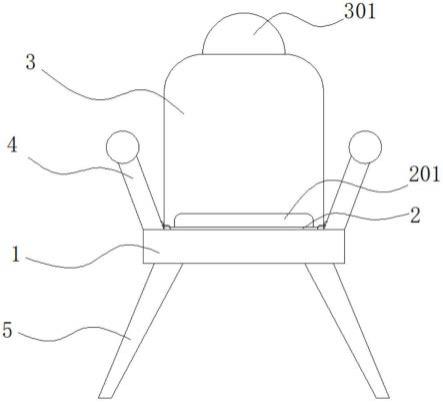
33.图1是本公开实施例一提供的清洁设备的整体结构示意图;
34.图2是本公开实施例一提供的清洁设备的握持部的剖视图;
35.图3是本公开实施例一提供的清洁设备的手柄组件的爆炸图;
36.图4是本公开实施例一提供的清洁设备的握持部的另一剖视图;
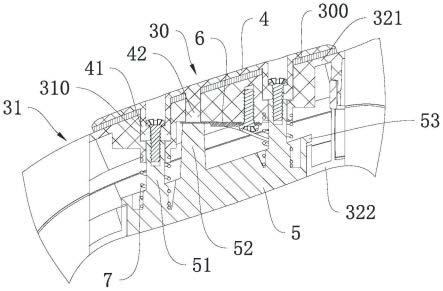
37.图5是本公开实施例二提供的清洁设备的手柄组件的剖视图;
38.图6是本公开实施例二提供的清洁设备的握持部的剖视图;
39.图7是本公开实施例二提供的清洁设备的握持部的另一剖视图。
40.图1至7中各组件名称和附图标记之间的一一对应关系如下:
41.1、地刷组件;2、滚轮组件;3、手柄组件;30、握持部;300、第一密封垫;301、第二密封垫;302、第一触发部;303、第二触发部;304、第一密封圈;305、第二密封圈;31、手柄本体;310、导向通孔;311、安装座;321、第一手柄盖;322、第二手柄盖;3220、开口;33、第一壳体;34、第二壳体;35、第一弹性件;36、第二弹性件;4、第一受力件;41、第一延伸部;42、第一抵压部;5、第二受力件;51、第二延伸部;52、第二抵压部;53、凸缘;6、检测装置;61、应变片;62、开关元件;7、弹性部。
具体实施方式
42.现在将参照附图来详细描述本公开的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本公开的范围。
43.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。
44.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
45.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
46.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
47.在本文中,“上”、“下”、“前”、“后”、“左”、“右”等仅用于表示相关部分之间的相对位置关系,而非限定这些相关部分的绝对位置。
48.在本文中,“第一”、“第二”等仅用于彼此的区分,而非表示重要程度及顺序、以及互为存在的前提等。
49.在本文中,“相等”、“相同”等并非严格的数学和/或几何学意义上的限制,还包含本领域技术人员可以理解的且制造或使用等允许的误差。
50.除非另有说明,本文中的数值范围不仅包括其两个端点内的整个范围,也包括含于其中的若干子范围。
51.本公开提供了一种清洁设备,可以应用于清洁室内或室外的地面、台面等工作面。清洁设备可以是手持式吸尘器、手持式洗地机等设备。清洁设备主要包括地刷组件、滚轮组件、手柄组件和控制单元,地刷组件用于清洁工作面,滚轮组件被构造为受控于驱动组件,带动地刷组件在工作面上往复行走,手柄组件包括用于供用户握持的握持部,用户能够手持握持部向前推动地刷组件或向后拉动地刷组件,以使地刷组件往复运动进行清洁工作。
52.手柄组件包括手柄本体、握持部和检测装置,握持部导向配合在手柄本体上,检测装置设置在手柄本体和握持部之间。在外力作用下,握持部能够向第一方向、第二方向运动。初始状态下,握持部被构造为向第一方向运动,以触发检测装置发出推力信号;初始状态下,握持部被配置为向第二方向运动,以触发检测装置发出拉力信号。握持部相对于手柄本体向第一方向或第二方向发生微位移。在本公开中,“微位移”指的是微小位移量,即在用户操作该手柄组件时,虽然握持部发生了位移,但是用户肢体无法感知该微小位移量。在本公开一个具体的实施方式中,握持部相对于手柄本体向第一方向或第二方向的运动行程在5mm以下;进一步地,在3mm以下。用户在控制清洁设备移动时感知不到握持部的运动,从而能够提高用户的使用体验。
53.手柄组件还包括控制单元,控制单元基于推力信号,控制滚轮组件带动地刷组件向前运动,以及基于拉力信号控制滚轮组件带动地刷组件向后运动。使用时,滚轮组件根据用户的施力方向,提供前后运动的动力,能够使用户更加省力,提高了清洁设备的便利性。
54.下面将结合具体结构对本公开的技术方案进行详尽的描述。
55.实施例一
56.在本实施例中,如图1所示,清洁设备包括地刷组件1、滚轮组件2和手柄组件3。地刷组件1具有滚刷,滚刷能够在工作面上滚动,以清洁工作面。滚轮组件2用于辅助地刷组件1在工作面上行走。手柄组件3包括手柄本体31和握持部30,握持部30导向配合在手柄本体31上,用户能够对握持部30施加往用户方向的拉力,以及远离用户方向的推力,握持部30在拉力或者推力的作用下能够往相应的方向发生微位移。
57.清洁设备还包括检测装置6,检测装置6设置在手柄本体31与握持部30之间。握持
部30能够向第一方向或第二方向运动,以触发检测装置6的发出信号。握持部30不受外力的状态,或者握持部30所受外力平衡并且相对手柄本体31静止的状态为初始状态。在初始状态下,握持部30向第一方向运动时触发检测装置6的推力信号;在初始状态下,向握持部30向第二方向运动时触发检测装置的拉力信号。握持部30相对于手柄本体31往第一方向或第二方向的运动属于微位移,位移量在5毫米以下,例如3毫米、1毫米等。
58.详细地,用户手持握持部30向第一方向施加推力,第一方向为清洁设备的前进方向,用户对握持部30向第二方向施加拉力,第二方向为清洁设备的后退方向。
59.如图1所示,清洁设备具有机身,地刷组件1和滚轮组件2设置在机身的底部,手柄组件3设置在机身的顶部。地刷组件1还包括滚刷电机,滚刷电机与滚刷驱动连接,能够驱动滚刷转动,以提高滚刷的清洁能力。机身上设置有用于储存清洁液体的清水箱,清水箱中的清洁液体能够提供至地刷组件1的滚刷上,以进一步提高滚刷的清洁能力。清洁设备上还设置有污水箱、与污水箱连通的风道,以及在风道中形成负压的风机组件,滚刷上的水渍和脏污能够通过风道吸入污水箱中进行储存。
60.滚轮组件2包括驱动机构,驱动机构能够控制滚轮转动,以带动地刷组件1在工作面上往复行走,以使用户更加省力。驱动机构包括驱动电机,以及与滚轮组件2传动连接的传动件,传动件包括但不限于齿轮组、传动链、传动轴等,驱动电机的输出轴能够正转或反转,并通过传动件驱动滚轮组件2在正反两个方向上转动,从而带动地刷组件1向前或向后行走。
61.本公开中为使表述清楚、简洁,以地刷组件1的行走方向为前后方向,使用时,用户站在清洁设备的后方,并推动手柄组件3以使地刷组件1向前行走,或者拉动手柄组件3以使地刷组件1向后行走。
62.在本公开的一种实施方式中,如图2、图3所示,握持部30包括第一受力件4和第二受力件5,用户能够用手握住第一受力件4和第二受力件5,并施加推力或拉力。检测装置6设置在第一受力件4和第二受力件5之间,第一受力件4、第二受力件5能够沿垂直于手柄本体31的延伸方向运动,以分别触发检测装置6。检测装置6能够检测第一受力件4和第二受力件5的受力。用户在推动握持部30时,向第一受力件4施加向前的推力,第一受力件4受到推力后能够触发检测装置6,使检测装置6发出推力信号;用户在拉动握持部30时,向第二受力件5施加向后的拉力,第二受力件5受到拉力后能够触发检测装置6,使检测装置6发出拉力信号。
63.清洁设备还包括控制单元,控制单元能够接收检测装置6发出的推力信号和拉力信号,并且通过驱动机构控制滚轮组件2的行走方向。具体的,控制单元接收检测装置6的推力信号后,能够通过驱动机构控制滚轮组件2向前运动,以带动地刷组件1向前行走;控制单元接收检测装置6的拉力信号后,能够通过驱动机构控制滚轮组件2向后运动,以带动地刷组件向后行走。此外,地刷组件1、风机组件等部件均可以通过控制单元进行控制。
64.用户握住手柄组件3的握持部30向前推动时,滚轮组件2能够带动地刷组件1自动向前行走,用户握住握持部30向后拉动时,滚轮组件2能够带动地刷组件1自动向后行走。用户可以站在原地推拉手柄组件3,使地刷组件1在前后方向往复运动,控制单元能够基于推力信号或拉力信号及时调整滚轮组件2的运动方向。
65.本公开的握持部30的上端至下端逐渐往用户的方向倾斜,即向后方倾斜,垂直于
滚轮组件2的转动轴线,用户仅施加推力或拉力即可,不用施加握住握持部30的力,更加符合人体工程力学,并且操作时更加省力。另外,用户掌心或者靠近拇指部分的手掌施加的推力可以直接作用在握持部30上,不但可以推动第一受力件4触发检测装置6,还可以给予清洁设备向前运动的动力,使得清洁设备在推力以及滚轮组件2的共同作用下由静止状态开始向前运动,之后,清洁设备便可在滚轮组件2的作用下往前运动。
66.当清洁设备运动至用户手臂向前伸出的极限状态时,握持部30会受到用户的拉力。此时第二受力件5触发检测装置6,由此可控制清洁设备向后运动,即向用户的方向运动。使用户可以更容易地将拉力施加在握持部30上,即仅靠用户手部的四指部分即可将拉力施加给握持部30。由此可通过用户手部的不同位置给握持部30施加推力和拉力,这不但符合人体工程力学,另外还利于用户操作清洁设备,提高了用户的体验。
67.在本公开的一些实施方式中,如图2、图3所示,手柄本体31包括配合在一起的第一手柄盖321和第二手柄盖322,第一手柄盖321和第二手柄盖322采用可拆卸的连接结构,包括但不限于插接、卡接、螺钉等结构等。其中,第一手柄盖321位于邻近用户的一侧,第二手柄盖322位于远离用户的一侧,第一手柄盖321和第二手柄盖322围成内腔。第一受力件4设置在第一手柄盖321的外侧,第二受力件5设置在内腔中。第二手柄盖322上设置有与内腔连通的开口3220,并且第二受力件5通过开口3220露出,以使用户能够握住第二受力件5。开口3220可以设置在背向第一手柄盖321的一侧,即第一受力件4和第二受力件5位于手柄本体31的相对两侧。开口3220可以设置为与第二受力件5适配的形状。检测装置6可以设置在内腔中,与内腔中的第二受力件5配合,第一受力件4的部分结构可以穿过第一手柄盖321伸入内腔中,与检测装置6配合。
68.在本公开的另一些实施方式中,也可以将第一受力件4设置在内腔中,第二受力件5设置在第二手柄盖322的外侧。第一手柄盖321上设置有与内腔连通的开口,开口位于背向第二手柄盖322的一侧,第一受力件4通过开口露出,第一受力件4和第二受力件5位于握持部30的相对两侧,能够被用户同时握住。开口可以设置为与第一受力件4适配的形状。检测装置6可以设置在手柄组件3的内腔中,与内腔中的第二受力件5配合,第二受力件5的部分结构可以穿过第二手柄盖322伸入内腔中,与检测装置6配合。在本公开的一些实施方式中,用户使用清洁设备时站在机身的后方,第一受力件4可以设置在握持部30上面向用户的一侧,第二受力件5可以设置在握持部30上背向用户的一侧。用户向前推动手柄组件3时,对握持部30施加向前的推力,用户向后拉动手柄组件3时,对握持部30施加向后的拉力。
69.在本公开的一些实施方式中,第一受力件4、第二受力件5受到用户的推力、拉力时发生形变或运动,检测装置6可以通过检测到第一受力件4、第二受力件5的形变或运动被触发。在本公开的一种具体实施方式中,第一受力件4、第二受力件5被构造为沿着垂直于手柄本体31延伸的方向运动,以分别触发检测装置6。检测装置6可以是电位器、可变电阻器等装置,能够检测到第一受力件4、第二受力件5的运动方向。
70.在本公开的一种具体实施方式中,如图2、图3所示,检测装置6包括应变片61,应变片61包括受力形变部分和器件部分,应变片61的形变部分具有一定的弹性,并且形变部分位于第一受力件4、第二受力件5之间。第一受力件4、第二受力件5运动时挤压应变片61的形变部分发生形变,器件部分能够将形变部分的形变转化为电信号。
71.第一受力件4、第二受力件5位于应变片61的相对两侧,对应变片61形变部分两侧
的表面产生不同方向的挤压。应变片61形变部分相对两侧表面受力时,会产生不同的电信号,根据不同电信号能够判断力的方向。应变片61位于内腔中,并且通过粘接、卡接、螺钉固定等方式固定在第一手柄盖321和/或第二手柄盖322上。
72.用户在推动或拉动握持部30时,第一受力件4被配置为,在推力作用下向靠近应变片61的方向运动并挤压应变片61,使应变片61在第一方向上形变,并基于形变向控制单元发出推力信号;第二受力件5被配置为,在拉力作用下向靠近应变片61的方向运动并挤压应变片61,使应变片61在第二方向上形变,并基于形变向控制单元发出拉力信号。
73.在本公开的一种实施方式中,第一受力件4、第二受力件5固定连接在一起,且被构造为在第一受力件4受到推力或者在第二受力件5受到拉力时,第一受力件4、第二受力件5相对于手柄本体31整体运动,以使检测装置6仅能够检测到第一受力件4、第二受力件5中的一个,并触发推力信号或者拉力信号,避免出现推力信号和拉力信号同时被触发的情况。
74.在本公开的具体实施方式中,如图2、图3所示,第一受力件4具有第一延伸部41,第二受力件5具有第二延伸部51,第一延伸部41与第二受力件5固定连接,其固定连接的方式包括但不限于粘接、插接、螺丝固定等,以将第一受力件4、第二受力件5连接在一起。第一延伸部41、第二延伸部51为向相互靠近方向延伸的柱状结构,手柄组件3的手柄本体31上设置有导向通孔310,第一延伸部41、第二延伸部51中的至少一个穿过导向通孔310,并与导向通孔310导向配合在一起,以限定第一受力件4、第二受力件5沿着导向通孔310的延伸方向运动。
75.具体的,如图2、图3所示,导向通孔310设置在第一手柄盖321上,第一手柄盖321可以延伸出管状结构,在管状结构内构成导向通孔310。第一延伸部41至少部分从外侧伸入导向通孔310中,第二延伸部51至少部分从内腔中伸入导向通孔310中。第一延伸部41内设置有钉孔,第二延伸部51的端部设置有螺纹孔,第一延伸部41和第二延伸部51在导向通孔310中通过螺钉固定连接。安装时,将第一延伸部41和第二延伸部51插入导向通孔310中,然后将螺钉装入第一延伸部41的钉孔并旋入第二延伸部51的螺纹孔中。
76.以固定连接在一起的第一延伸部41和第二延伸部51为一组,第一延伸部41和第二延伸部51设置有至少一组。如图2、图3所示的实施方式中,第一延伸部41和第二延伸部51设置有两组,导向通孔310对应的设置有两个,检测装置6可以设置在两组第一延伸部41和第二延伸部51之间的位置。
77.在本公开的一些实施方式中,如图2、图3所示,第一受力件4具有第一抵压部42,第二受力件5上设置有第二抵压部52,第一抵压部42和第二抵压部52分别位于应变片61的相对两侧,应变片61固定设置在手柄本体31上,第一抵压部42、第二抵压部52被配置为分别挤压应变片61的形变部分,以使应变片61的形变部分在两个方向上发生形变。第一抵压部42、第二抵压部52可以设置为向应变片61方向相对延伸的柱状结构,第一受力件4、第二受力件5受到的压力能够通过第一抵压部42、第二抵压部52集中在应变片61上,从而增加应变片61的灵敏性。
78.具体的,第一手柄盖321上设置有供第一抵压部42穿过的通孔,第一抵压部42能够通过通孔伸入手柄组件3的内腔中。第一受力件4受到向前的推力时,第一抵压部42挤压应变片61的形变部分以使形变部分在第一方向上发生形变;第二受力件5受到向后的拉力时,第二抵压部52挤压应变片61的形变部分,以使形变部分在第二方向上发生形变。
79.握持部30在不受推拉力的初始状态下,第一抵压部42和第二抵压部52可以不与应变片61接触,或者处于刚刚接触而应变片61不发生形变的状态。第一受力件4、第二受力件5受到的压力后发生微位移,对应变片61造成挤压。第一抵压部42和第二抵压部52的相对位置可以上下正对,也可以错开设置,错开设置能够降低相互之间的干扰。
80.在本公开的一种实施方式中,应变片61可以设置有两个,其中一个与第一受力件4对应,另一个与第二受力件5对应。具体地,第一受力件4受到推力后,通过第一抵压部42挤压对应的应变片61,第二受力件5受到拉力后,通过第二抵压部52挤压对应的应变片61。控制单元基于应变片61触发的电信号从而控制清洁设备往相应的方向运动。
81.在本公开的一种实施方式中,第一受力件4、第二受力件5与手柄本体31之间设置有止位机构,止位机构被构造为限制第一受力件4、第二受力件5相对于手柄本体31的运动行程。
82.在一种具体实施方式中,如图2所示,止位机构是设置为阶梯孔结构的导向通孔310,导向通孔310包括与第一延伸部41导向配合的第一导向孔(图中未标号),以及与第二延伸部51导向配合的第二导向孔(图中未标号),第二导向孔的孔径大于第一导向孔的孔径。由于孔径的差异,限制了第二延伸部51向靠近第一受力件4的方向运动。
83.在一种具体实施方式中,如图2、图3所示,止位机构包括设置在第二受力件5边缘的凸缘53,凸缘53能够抵接在第二手柄盖322的开口3220内侧边缘,限制第二受力件5的运动行程,阻止第二受力件5脱离开口3220。
84.止位机构可以同时包括阶梯孔结构的导向通孔310和第二受力件5上的凸缘53,从而限制第一受力件4和第二受力件5在相对两个方向上的运动行程。
85.在本公开的一些实施方式中,如图2、图3所示,第一受力件4与手柄本体31之间可以设置第一密封垫300,第一密封垫300被构造为用于密封第一受力件4与手柄本体31之间的缝隙,以及使得第一受力件4在受到推力时能够提供形变空间,并使第一受力件4在第一密封垫300弹性作用下复位。第一密封垫300能够避免缝隙进水,对检测装置6进行保护。第一受力件4在受到推力作用时沿着导向通孔310运动,并挤压第一密封垫300,第一密封垫300发生形变,使得第一受力件4能够产生微位移,进一步使得应变片61发生形变,当推力撤销时,第一密封垫300能够通过自身的弹力作用使第一受力件4复位。
86.具体的,第一受力件4可以被构造为与手柄本体31至少部分表面具有适配的形状,第一密封垫300设置在第一受力件4与手柄本体31的整个表面之间;第一延伸部41穿过第一密封垫300和手柄本体31,并与第二受力件5的第二延伸部51固定连接在一起。具体的,第一密封垫300和第一受力件4可以均设置为片状结构,第一密封垫300上设置有供第一延伸部41和第一抵压部42穿过的通孔,第一延伸部41能够穿过第一密封垫300的通孔深入导向通孔310中,第一抵压部42能够穿过第一密封垫300的通孔和第一手柄盖321的通孔伸入内腔中。
87.本公开的第一密封垫300不但可以密封第一受力件4与手柄本体31之间的间隙,还可以为第一受力件4向第一方向的运动提供微位移量,即用户向前推动手柄组件3,并使得至少部分推力可以施加在第一受力件4上,从而使第一受力件4挤压第一密封垫300发生形变,并且第一受力件4在第一密封垫300的作用下发生的位移量很小,在5毫米以下,从而使得用户感知不到第一受力件4的位移量,即可实现对清洁设备的运动控制,提高了用户的使
用体验。
88.在本公开的一种实施方式中,参考图2、图3,第二受力件5与手柄本体31之间设置有弹性部7,第二受力件5被构造为受到拉力时挤压弹性部7发生形变,以及在拉力消失时在弹性部7的作用下复位。弹性部7可以采用弹片、弹簧、弹性块等,如图2、图3所示的实施方式中,弹性部7采用压缩弹簧,压缩弹簧套设在第二延伸部51上,并且其中一端与第一手柄盖321上导向通孔310的边缘配合,另一端与第二受力件5配合。
89.当第一受力件4、第二受力件5均不受外力作用时,第一密封垫300和压缩弹簧均处于松弛状态,并且固定在一起的第一受力件4和第二受力件5具有沿着导向通孔310向相对两个方向运动的余量。此时,应变片61处于自然状态,不受第一抵压部42或第二抵压部52的挤压。
90.在本公开的另一种实施方式中,如图4所示,第二受力件5与手柄本体31之间设置有第二密封垫301。第二密封垫301的结构和原理与第一密封垫300相似。具体地,第二密封垫301被构造为用于密封第二受力件5与手柄本体31之间的缝隙,避免缝隙进水,第二密封垫301还使得第二受力件5在受到推力时能够提供形变空间,并使第二受力件5在第二密封垫301弹性作用下复位。第二受力件5在受到拉力作用时向第二手柄盖322内运动,并挤压第二密封垫301,第二密封垫301发生形变,使得第二受力件5发生微位移,进一步挤压应变片61形变,当拉力撤销时,第二密封垫301通过自身的弹力作用使第二受力件5复位。在该实施例中,不需要设置额外的弹性部来为第二受力件5的复位提供弹性力。
91.具体地,第二受力件5露出的第二手柄盖322的部分可以设置为与手柄本体31至少部分表面具有适配的形状,第二密封垫301设置在第二受力件5与手柄本体31的表面之间。第二密封垫301上设置有供第二延伸部51和第二抵压部52穿过的通孔,第二延伸部51和第二抵压部52穿过第二密封垫301进入手柄组件3的内腔中。
92.在上述设置第一密封垫300、第二密封垫301的实施例中,可以控制使第一受力件4、第二受力件5在推力、拉力的作用下运动的行程分别在1毫米以下,应变片61受到挤压后发生微小形变,并且第一密封垫300、第二密封垫301的形变较小,以使用户几乎感觉不到第一受力件4、第二受力件5的位移,提高了使用体验,并且不影响第一密封垫300的密封效果。
93.在本公开一个实施方式中,参考图3,第一受力件4、第二受力件5导向配合在手柄本体31上,且被配置为与手柄本体31的外轮廓相适配,这使得用户在握持手柄组件3时,部分手掌与手柄本体31接触,部分手掌与第一受力件4、第二受力件5接触。用户施加推力或者拉力的时候,只需要靠部分手掌与第一受力件4、第二受力件5相接触,这可以降低用户对第一受力件4、第二受力件5发生位移的敏感度,进一步提高了用户的使用体验。
94.实施例二
95.本实施例中,清洁设备包括地刷组件、滚轮组件、手柄组件、检测装置以及控制单元,其中,地刷组件、滚轮组件和控制单元的结构和原理与实施例一中的地刷组件1、滚轮组件2和控制单元完全相同,本实施例在此不再进行赘述。
96.本实施例中,如图5所示,清洁设备的手柄组件3包括握持部30和手柄本体31,用户能够手持手柄组件3的握持部30推动或拉动清洁设备,以使地刷组件1和滚轮组件2在工作面上往复行走。握持部30可以设置为柱状结构,以便于用手抓握。
97.握持部30导向配合在的手柄本体31上,检测装置6设置在手柄本体31和握持部30
之间。在外力作用下,握持部30能够向第一方向、第二方向运动。初始状态下,握持部30被构造为向第一方向运动,以触发检测装置6发出推力信号;初始状态下,握持部30被配置为向第二方向运动,以触发检测装置6发出拉力信号。握持部30相对于手柄本体31向第一方向或第二方向运动的位移量在5毫米以下,握持部30的运动属于微位移,由此可用户感知不到握持部30的位移量。
98.本公开中为使表述清楚、简洁,以地刷组件1的行走方向为前后方向,使用时,用户站在清洁设备的后方,并推动手柄组件3以使地刷组件1向前行走,或者拉动手柄组件3以使地刷组件1向后行走。
99.在本公开的一种实施方式中,握持部30的延伸方向垂直于滚轮组件2的转动轴线。滚轮组件2的转动轴线向左右方向延伸,握持部30向前后方向延伸。握持部30的延伸方向与受到的推力和拉力方向一致。
100.在本公开的一种实施方式中,如图5、图6所示,握持部30包括第一触发部302和第二触发部303,检测装置6设置在第一触发部302和第二触发部303之间,握持部30向第一方向运动时通过第一触发部302触发检测装置6发出推力信号,向第二方向运动时通过第二触发部303触发检测装置6的拉力信号。其中,第一方向为前方,第二方向为后方,即握持部30往前方运动时触发检测装置6发出推力信号,往后方运动时触发检测装置6发出拉力信号。
101.在本公开一个实施方式中,握持部30被配置为沿着手柄本体31的延伸方向运动。
102.在本公开的一种实施方式中,握持部30包括安装在手柄本体31上的壳体,壳体与手柄本体31之间围成内腔,检测装置6可以设置在内腔中。壳体可以是一体式结构,也可以由至少两部分连接组成。第一触发部302和第二触发部303设置在壳体内侧,并且,第一触发部302位于检测装置6的一侧,第二触发部303位于检测装置6的另一侧。由此使得握持部30在往不同的方向运动时,可以出发检测装置6发出推力信号或者拉力信号。控制单元能够接收检测装置6发出的推力信号和拉力信号,并且通过驱动机构控制滚轮组件2的行走方向。具体的,控制单元接收检测装置6的推力信号后,能够通过驱动机构控制滚轮组件2向前运动,以带动地刷组件1向前行走;控制单元接收检测装置6的拉力信号后,能够通过驱动机构控制滚轮组件2向后运动,以带动地刷组件向后行走。此外,地刷组件1、风机组件等部件均可以通过控制单元进行控制。
103.在本公开的一种实施方式中,如图6所示,手柄组件3还包括第一密封圈304和第二密封圈305,握持部30在延伸方向的其中一端通过第一密封圈304与手柄本体31连接,另一端通过第二密封圈305与手柄本体31连接。第一密封圈304和第二密封圈305能够密封握持部30与手柄本体31之间的缝隙,避免缝隙进水,对检测装置6进行保护。并且,握持部30在第一方向、第二方向的运动时分别挤压第一密封圈304、第二密封圈305。第一密封圈304和第二密封圈305为握持部30在第一方向、第二方向的运动提供的形变空间,并且能够通过自身弹力作用使握持部30复位。
104.在本公开的一种实施方式中,握持部30与手柄本体31之间还设置弹性装置,弹性装置可以设置在握持部30与手柄本体31之间的内腔中,手柄本体31上可以设置用于固定弹性装置的安装座311。握持部30向第一方向、第二方向运动时,弹性装置受到挤压或拉伸而发生形变。详细地,弹性装置包括第一弹性件35和第二弹性件36,握持部30向第一方向运动时挤压第二弹性件36,向第二方向运动时挤压第一弹性件35。第一弹性件35和第二弹性件
36能够通过弹性作用辅助握持部30复位。第一弹性件35、第二弹性件36包括但不限于压缩弹簧、弹性块等。
105.如图6所述的实施方式中,第一弹性件35和第二弹性件36均为压缩弹簧,并且分别固定在安装座311的相对两端。第一弹性件35和第二弹性件36的相互靠近一端连接在安装座311的相对两端,相互远离的一端均与握持部30的壳体连接。
106.当然,对于本领域技术人员而言,握持部30在往第一方向运动的过程中,其不但可以挤压第二弹性件35,还可以拉伸第二弹性件36,这与弹性件的设置方式有关,本公开在此不再具体说明。
107.在本公开的一种实施方式中,参考图7,握持部30包括配合在一起的第一壳体33和第二壳体34,第一壳体33和第二壳体34分别位于握持部30的相对两侧,可以通过螺钉等紧固件固定连接在一起。例如,第一壳体33和第二壳体34上分别设置有向内腔中延伸的安装部(图中未示出),安装部用于穿设螺钉,第一壳体33和第二壳体34通过螺钉固定连接在一起。第一壳体33和第二壳体34可以通过卡接、粘接等其它方式连接在一起。
108.在本公开的一种实施方式中,第一触发部302和第二触发部303设置在第一壳体33、第二壳体34的其中一个上,第一弹性件35和第二弹性件36设置在其中的另一个上。如图6所述的实施方式中,第一触发部302和第二触发部303设置在第一壳体33上,第一弹性件35和第二弹性件36设置在第二壳体34上,以使内腔中的各部件合理分布。
109.在本公开的另一种实施方式中,第一触发部302、第二触发部303,以及第一弹性件35、第二弹性件36也可以同时设置在第一壳体33上,或者同时设置在第二壳体34上,在此不再具体说明。
110.在本公开的一种实施方式中,如图6所示,检测装置6为应变片61,应变片61包括受力形变部分和器件部分,应变片61的形变部分具有一定的弹性,并且形变部分位于第一触发部302和第二触发部303之间。第一触发部302和第二触发部303运动时挤压应变片61的形变部分发生形变,器件部分能够将形变部分的形变转化为电信号。应变片61的工作原理可以参考实施例一中的应变片61,此处不再赘述。
111.在本公开的另一种实施方式中,如图7所示,检测装置6为开关元件62,开关元件62包括两个分别与第一触发部302、第二触发部303对应的按键。第一触发部302向第一方向运动时挤压开关元件62对应的按键,开关元件62发出推力信号;第二触发部303向第二方向运动时挤压开关元件62对应的按键,开关元件62发出拉力信号。
112.下面结合具体应用场景,对本公开采用的技术方案进行说明,以帮助理解。
113.应用场景一
114.用户使用清洁设备清洁地面,用户握住手柄组件3的握持部30,站在原地施加向前的推力或向后的拉力,以使地刷组件1在地面上前后往复行走,以清洁地面。
115.用户在向前推动时,由于握持部30垂直于地刷组件1的行走方向,用户掌心或者靠近拇指部分的手掌施加的推力可以直接作用在握持部30上,握持部30的第一受力件4在推力作用下,沿着导向通孔310向手柄组件3内腔中运动2毫米,并挤压第一密封垫300,第一受力件4的第一抵压部42挤压手柄组件3内腔中的应变片61,应变片61在第一方向上受压形变,并触发推力信号。控制单元接收推力信号后通过驱动机构控制滚轮组件2自动向前运动,并带动地刷组件1向前运动。用户施加的推力不但可以推动第一受力件4触发检测装置
6,还可以给予清洁设备向前运动的动力,使得清洁设备在推力以及滚轮组件2的共同作用下由静止状态开始向前运动。用户向前推动至手臂伸直后停止对第一受力件4施力,第一密封垫300能够通过弹力作用使第一受力件4复位,驱动机构停止对滚轮组件2的驱动。
116.由于用户站在原地不动,滚轮组件2在向前运动的过程中,用户对握持部30相对产生向后的拉力,握持部30的第二受力件5在拉力作用下,沿着导向通孔310向手柄组件3内腔中运动2毫米,并挤压第二延伸部51上的压缩弹簧,第二抵压部52挤压手柄组件3内腔中的应变片61,应变片61在第二方向上受压变形,然后触发拉力信号,控制单元接收拉力信号后通过驱动机构控制滚轮组件2自动向后运动,并带动地刷组件1向后运动。当地刷组件1运动至靠近用户至一定距离后,用户不再对握持部30施加拉力,第二受力件5在压缩弹簧的作用下复位,驱动机构停止对滚轮组件2的驱动。
117.用户可以重复上述推拉手柄组件3的动作,滚轮组件2能够基于用户的施力方向辅助地刷组件1前后运动,直到将地面清洁干净,使用时更加方便省力,提高了清洁设备的便利性。由于位移量极小,用户几乎感受不到握持部30的运动,使用体验更佳。
118.应用场景二
119.用户使用清洁设备清洁地面,用户握住手柄组件3的握持部30,站在原地施加向前的推力或向后的拉力,以使地刷组件1在地面上前后往复行走,以清洁地面。
120.握持部30垂直于滚轮组件2的转动轴线,用户在向前推动时,握持部30在推力作用下,相对于手柄本体31运动2毫米,握持部30的第一触发部302挤压第一密封圈304向第一方向运动,第一触发部302挤压手柄组件3内腔中的开关元件62,并触发推力信号,控制单元接收推力信号后通过驱动机构控制滚轮组件2自动向前运动,并带动地刷组件1向前运动。用户向前推动至手臂伸直后停止对握持部30施力,第一密封圈304能够通过弹力作用使握持部30复位,驱动机构停止对滚轮组件2的驱动。
121.由于用户站在原地不动,滚轮组件2在向前运动的过程中,用户手臂伸直后对握持部30产生相对向后的拉力,握持部30在拉力作用下,相对于手柄本体往第二方向运动2毫米,并挤压第二密封圈305,第一触发部302挤压手柄组件3内腔中的开关元件62,触发拉力信号,控制单元接收拉力信号后通过驱动机构控制滚轮组件2反向转动,并带动地刷组件1向后运动。当地刷组件1运动至靠近用户至一定距离后,用户不再对握持部30施加拉力,第二受力件5在第二密封圈305的作用下复位,驱动机构停止对滚轮组件2的驱动。
122.用户可以重复上述推拉手柄组件3的动作,滚轮组件2能够基于用户的施力方向辅助地刷组件1前后运动,直到将地面清洁干净,使用时更加方便省力,提高了清洁设备的便利性。由于位移量极小,用户几乎感受不到握持部30的运动,使用体验更佳。
123.以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。本公开的范围由所附权利要求来限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。