1.本实用新型涉及轨道机器人技术领域,特别涉及一种轨道式巡检机器人的充电装置。
背景技术:
2.随着自动化及智能化技术的普及,越来越多的综合管廊、电缆隧道和配电柜室等场所的巡检工作由轨道式机器人承担。隧道中应用的轨道式机器人依靠本体上的电池供电,并有自动充电功能。自动充电一般是在本体上安装充电插头,在轨道上安装充电座,当本体的电池电量低时,机器人后台系统发送指令,机器人运行至充电座处,充电插头和充电座的铜片接触充电;充电后,机器人驶离充电座,继续执行巡检任务。
3.目前,轨道机器人本体电池充电的充电装置、充电座大多固定在轨道一端,机器人不能往复通过充电座;充电装置机构复杂,占用空间大,机器本体的空间利用率低。
4.为此,本技术提出了一种轨道式巡检机器人的充电装置,以解决上述问题。
技术实现要素:
5.本实用新型为了弥补现有技术中的不足,提供了一种轨道式巡检机器人的充电装置。
6.一种轨道式巡检机器人的充电装置,包括设置在机器人本体上的充电插头以及设置在导轨下方的充电座,所述充电座包括固定连接在导轨下方的电极座,电极座的下方固定连接铜电极,铜电级连接设置在电极座一端的第二接线端子;
7.所述充电插头包括通过第一螺钉固定连接在机器人本体上的底座组件,底座组件上通过限位销和开口销可拆卸的安装有插头组件。
8.进一步地,为了更好的实现本实用新型,所述充电座的电极座通过螺钉固定连接铜电极,所述铜电极的一端通过螺钉固定有第二接线端子,第二接线端子之间有隔离块分隔;
9.所述电极座的一端设有倒角。
10.进一步地,为了更好的实现本实用新型,所述底座组件包括通过第一螺钉固定连接在机器人本体上的底座,底座的底部开有导向销孔,导向销孔中竖立有导向销,导向销上套有压簧,所述底座的两侧壁开有限位销孔,限位销孔中穿有限位销,限位销将插头组件固定在底座组件上。
11.进一步地,为了更好的实现本实用新型,所述插头组件包括插头座,插头座的一侧通过第二螺钉固定连接有铜插头,铜插头的顶部通过卡簧转动连接有铜滚轮,铜插头的一侧固定连接有第一接线端子;
12.所述插头座的底部开有导向孔,导向孔中插入导向销;
13.所述插座头的侧面开通限位孔,所述铜插头的侧面开通腰孔;限位孔和腰孔中穿有限位销。
14.本实用新型的有益效果是:
15.(1)在弹簧张力作用下,插头滚轮与插座铜电极紧密接触,通电可靠性高。
16.(2)在充电时,机器人本体可在充电点的任意位置前进或者后退,无方向限制,不会被充电底座卡住。
17.(3)滚动接触产生磨损量少,更能保证充电机构的有效工作次数,延长充电插头使用寿命。
18.(4)采用快拆设计,拔开限位销,即可取出插头组件,零件维护方便。
19.(5)充电插头结构简单,尺寸小巧,在本体上占用空间小。
附图说明
20.图1为本实用新型的机器人及充电座布置示意图;
21.图2为本实用新型的图1的右视图;
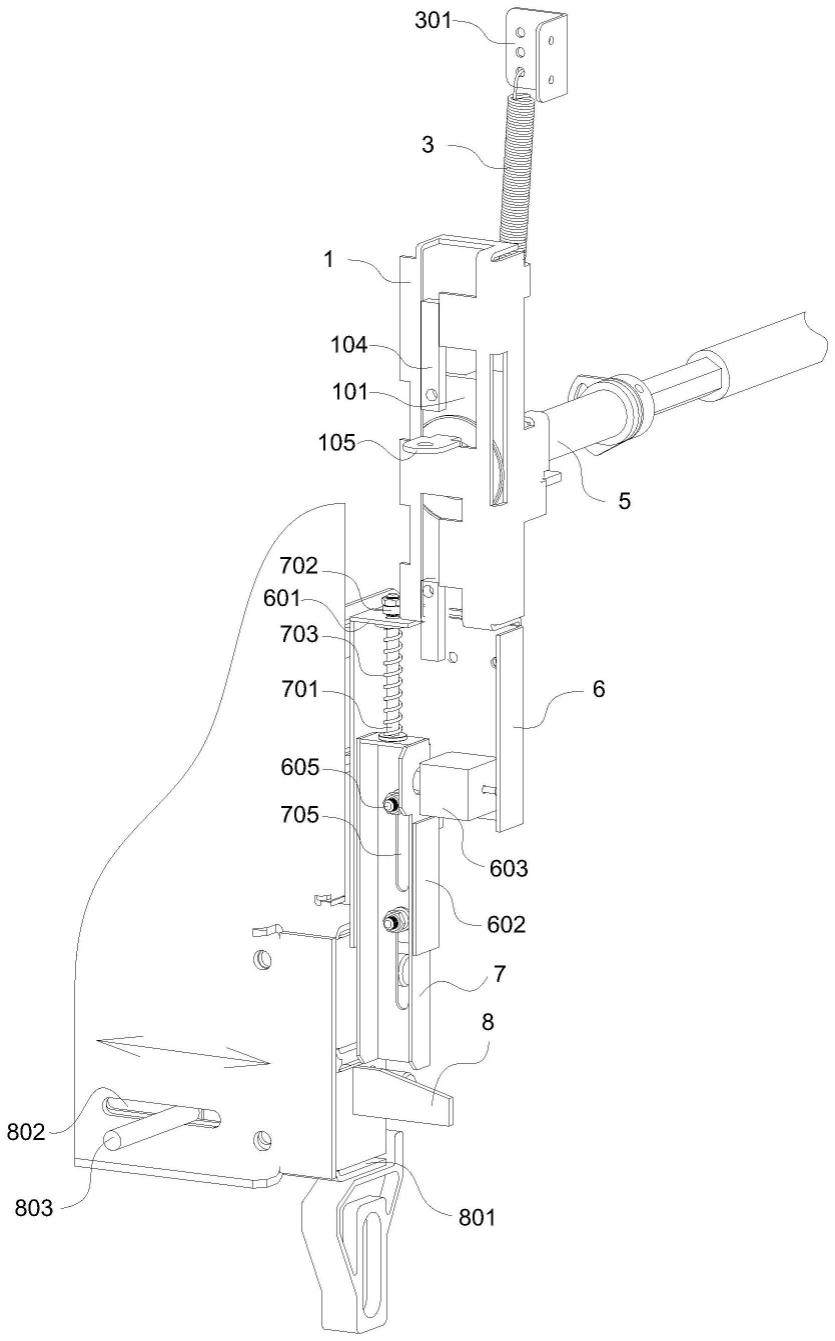
22.图3为本实用新型的充电插头在机器人本体上的示意图;
23.图4为本实用新型的充电插头组装的爆炸图;
24.图5为本实用新型的充电插头侧视图;
25.图6为本实用新型的插头组件的正视图;
26.图7为本实用新型的插头组件的斜视图;
27.图8为本实用新型的充电座的俯视图;
28.图9为本实用新型的充电座的剖视图;
29.图10为本实用新型的充电座的仰视图;
30.图11为本实用新型的充电座的斜视图;
31.图12为本实用新型的充电插头的铜滚轮与充电座的铜电极接触过程的示意图。
32.图中,
33.1、机器人本体,
34.2、导轨,
35.3、充电座,301、隔离块,302、固定孔,303、电极座,304、铜电极,305、倒角,306、第二接线端子,
36.4、充电插头,401、底座组件,402、插头组件,403、第一螺钉,404、开口销,405、限位销,
37.4011、底座,4012、导向销,4013、压簧,4014、限位销孔,4015、导向销孔,
38.4021、插头座,4022、铜插头,4023、铜滚轮,4024、导向孔,4025、腰孔,4026、限位孔,4027、卡簧,4028、第一接线端子,4029、第二螺钉。
具体实施方式
39.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
40.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求
保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
41.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电性连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
42.图1-图12为本实用新型的一种具体实施例,该实施例为一种轨道式巡检机器人的充电装置。
43.如图1-3所示,充电座3固定在轨道上,充电插头4固定在机器人本体1上。
44.如图4-7所示,充电插头4包括底座组件401、插头组件402、限位销405、开口销404。
45.插头组件402包括铜滚轮4023、铜插头4022、卡簧4027、第一接线端子4028、插头座4021;铜插头4022上开有若干孔和腰孔4025;铜滚轮4023上设置卡簧槽、滚轮和轴;插头座4021上设有导向孔4024、限位孔4026。其中,铜滚轮4023的轴与铜插头4022的孔配合,卡簧槽中有卡簧4027进行限位,防止铜滚轮4023与铜插头4022分离;铜插头4022和插头座4021用第二螺钉4029固定,第二螺钉4029穿过插头座,固定在螺纹孔上,此时插头座4021的限位孔4026和铜插头4022的腰孔4025中心位置对齐,并且腰孔4025的长、宽均大于限位孔4026;第一接线端子4028通过螺钉固定在插头座4021螺纹孔上。
46.底座组件401包括底座4011、压簧4013、导向销4012。底座4011上有导向销孔4015、限位销孔4014,导向销4012和导向销孔4015紧密配合,导向销4012端部的空隙用结构胶封堵,防止导向销4012掉落;每根导向销4012上,均穿过1根压簧4013。
47.插头组件402和底座组件401装配时,导向销4012插入导向孔4024中,限位销405从一侧限位销孔4014穿入,依次穿过插头组件402的限位孔4026后,从另一侧限位销孔4014穿出,然后用开口销404将限位销405进行固定,防止掉出限位销孔4014。压簧4013直径大于导向孔4024,在插头组件402和底座组件401之间提供涨紧力。
48.如图8-11所示,充电座3包括电极座303、铜电极304、第二接线端子306,电极座上303有隔离块301、固定孔和倒角305。其中,铜电极304嵌入电极座303槽中,两者用螺钉固定;第二接线端子306用螺钉固定在铜电极304上,第二接线端子306之间有隔离块301进行分隔,防止短路。
49.如图12所示,充电插头4朝向充电座3移动,铜滚轮4023先与倒角305接触后,插头组件402向下移动并挤压弹簧,铜滚轮4023受到弹簧涨紧力,压紧在充电座3底面上,与铜电极304组成通路。
50.本实施例的具体运行原理如下:
51.机器人载着充电插头,充电座固定在轨道上。当电池电量低时,系统发出指令,机器人靠近充电座方向行驶。
52.当铜滚轮与充电座接触时,在倒角作用下,铜滚轮给插头组件一个向下的分力,使插头组件下压弹簧,直到铜滚轮完全进入插头座底面,并与铜电极接触。
53.充电座上,将导线分别接入3个铜电极。3个电极中,两侧接入正极,中间接入负极。
1个正极和负极,构成充电电路,用于本体电池充电;另一个正极和负极,构成供电电路,用于充电时的本体供电。充电插头上3个滚轮分别与充电座3个电极接触,电极极性对应。
54.此时,机器人借助标签或者编码器,测出机器人充电插头到达指定位置后,系统启动充电,使导线带电,充电供电电路连通,对机器人本体进行供电,对电池进行充电。
55.当充电完成后,机器人向前或向后驶离充电座,充电插头在压簧涨紧力作用下回复原位。当机器人运行轨道距离过长时,可以沿轨道多设置几个充电座,以方便机器人系统的充电。
56.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其他修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。