1.本发明涉及无人果园技术领域,特别涉及一种果林自动化喷雾装置。
背景技术:
2.为促进水果高产、农业增效,我国目前正在大力推行“无人果园”建设,通过一台台安装智能管理设备的机械,技术人员远程操控设备就能实时了解果园中的情况并进行一系列农业作业;
3.果园作业由机械化走向智能化,不但省时省力、节水节肥、再次降低农业生产成本、提升农产品质量,还有效解决了部分土地无人管理的情况,实现了经济效益与社会效益“双丰收”;
4.现有的果园自动化喷雾装置多为固定的架体进行定时喷洒雾化农药,其占地面积对于果园耕种而言有较大的限制,其次其水控系统较为复杂,提高了生产成本;最重要的是,传统技术中的无人喷洒雾化农药的装置为定向喷洒装置,其无法做到人工喷洒的可调节形,对于实际生产而言有较大的改进之处。
5.为此,提出一种果林自动化喷雾装置。
技术实现要素:
6.有鉴于此,本发明实施例希望提供一种果林自动化喷雾装置,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择;
7.本发明实施例的技术方案是这样实现的:一种果林自动化喷雾装置,包括运载车;
8.所述运载车上安装有调节机构,所述调节机构的顶部安装有喷洒机构;
9.所述运载车沿果林道路巡航,并搭配所述调节机构和所述喷洒机构进行喷雾作业;
10.所述调节机构根据果树的高度及形状参数,运载驱动所述喷洒机构沿果树的外部以弧形路径进行动态调节;
11.所述喷洒机构根据果树的外形参数,自动驱动调节喷洒面积及外径参数。
12.作为本技术方案的进一步优选的:所述喷洒机构包括机架、吹浮组件和动态喷雾组件;
13.所述机架为圆柱形;所述吹浮组件安装于所述机架的底部,用于喷雾作业时扰动果树的叶片浮动飞舞,进而提高并扩大喷洒效果;
14.所述动态喷雾组件的数量不少于六组,并以环形阵列的方式均匀安装于所述机架的上部,每组所述动态喷雾组件共同作业,根据果树的外形参数,自动驱动调节喷洒面积及外径参数。
15.作为本技术方案的进一步优选的:所述喷洒机构还包括第二伺服电机、曲柄摇杆组件和转环;
16.所述第二伺服电机的输出轴与所述曲柄摇杆组件的曲柄固定连接;所述转环的内
侧壁转动连接于所述机架的外表面;
17.所述动态喷雾组件包括第一铰杆、l形架、第二铰杆、铰合架和喷头;
18.所述第一铰杆的一端通过球形联轴器万向铰接于所述转环的顶部,所述l形架的顶部和底部分别通过球形联轴器万向铰接于所述第一铰杆的另一端和所述第二铰杆的一端,所述第二铰杆的另一端通过球形联轴器铰接于所述铰合架的外表面;
19.所述l形架的中心点通过销轴铰接于所述机架的外表面;
20.所述铰合架的底部通过合页铰接于所述机架的外表面上侧;
21.所述喷头安装于所述铰合架的外表面,并通过所述运载车运载的水箱及水泵所提供的喷液进行喷洒作业;
22.所述铰合架呈s拉伸状的板体形,每个所述喷洒机构的所述铰合架相互贴合。
23.作为本技术方案的进一步优选的:所述吹浮组件包括第一伺服电机和与所述第一伺服电机输出轴固定连接的扇叶。
24.作为本技术方案的进一步优选的:所述调节机构包括三组伺服电动葫芦与钢丝绳,还包括气囊与连接架;
25.所述伺服电动葫芦用于驱动所述钢丝绳伸缩,所述伺服电动葫芦以环形阵列的方式安装于所述运载车的外部;
26.所述气囊上下叠加且相互连通,总体呈锥形且为一组,共三组并以三角状相互安置,每层之间的所述气囊相互不连通;
27.每层之间的所述气囊通过所述连接架相互固定连接,每层所述连接架通过钢缆相互串联;
28.所述气囊的外表面固定连接有锚点,所述钢丝绳的外表面固定连接于位于最顶部的所述气囊的所述锚点;其余每层所述气囊的所述锚点的内侧壁与所述钢丝绳的外表面滑动连接;
29.最顶部的所述气囊的顶部固定连接有固定架;所述固定架的顶部与所述喷洒机构的底部固定连接。
30.作为本技术方案的进一步优选的:所述运载车包括车体和安装于所述车体前部的agv传感器;
31.所述agv传感器用于检测果园铺设的agv磁轨,通过与所述车体的控制器交互,实现自动巡航。
32.作为本技术方案的进一步优选的:所述车体的外表面安装有光伏板;
33.所述光伏板负责负责光伏转换,并与所述车体的光伏逆变器联接,为所述车体的蓄电池供电。
34.作为本技术方案的进一步优选的:所述车体的外表面环形阵列式安装有液压支腿。
35.与现有技术相比,本发明的有益效果是:
36.一、本发明通过调节机构及喷洒机构之间的机械联动及相互配合,在实际使用的过程中能够对果树的外廓进行动态化适配驱动喷洒作业,且在喷洒的过程中沿果树的外廓弧形路径进行自适应化动态驱动,且喷洒本身也可根据果树外廓曲率进行扩大或缩小化面积及外径参数,在实际作业的环境中通过上述动态喷洒的方式模拟人工作业条件,有效提
高了喷洒效率及实用性;
37.二、发明通过运载机构实现了无人化运载及采摘作业,实现了全天候自动巡航作业;且通过太阳能供能的形式能够有效满足自给能需求。
附图说明
38.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
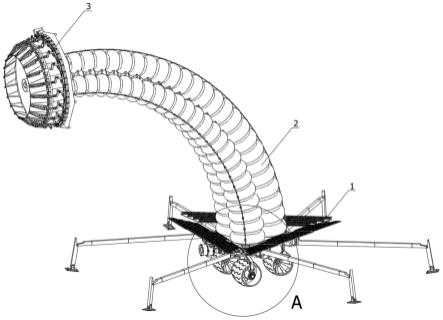
39.图1为本发明的立体结构示意图;
40.图2为本发明的图1的a区放大视角立体结构示意图;
41.图3为本发明的运载车立体结构示意图;
42.图4为本发明的调节机构工作状态下的立体结构示意图;
43.图5为本发明的图4的b区放大视角立体结构示意图;
44.图6为本发明的喷洒机构立体(颠倒)结构示意图;
45.图7为本发明的喷洒机构立体(颠倒)结构示意图;
46.图8为本发明的图7的c区放大视角立体结构示意图。
47.附图标记:1、运载车;101、车体;102、agv传感器;103、液压支腿;104、压缩气罐;105、光伏板;2、调节机构;201、伺服电动葫芦;202、钢丝绳;2021、锚点;203、气囊;204、连接架;205、固定架;3、喷洒机构;301、机架;302、第一伺服电机;303、扇叶;304、第二伺服电机;305、曲柄摇杆组件;306、转环;307、第一铰杆;308、l形架;309、第二铰杆;310、铰合架;311、喷头。
具体实施方式
48.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
49.需要注意的是,术语“第一”、“第二”、“对称”、“阵列”等仅用于区分描述与位置描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“对称”等特征的可以明示或者隐含地包括一个或者更多个该特征;同样,对于未以“两个”、“三只”等文字形式对某些特征进行数量限制时,应注意到该特征同样属于明示或者隐含地包括一个或者更多个特征数量;
50.在本发明中,除非另有明确的规定和限定,“安装”、“连接”、“固定”等术语应做广义理解;例如,可以是固定连接,也可以是可拆卸连接,或一体成型;可以是机械连接,可以是直接相连,可以是焊接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据说明书附图结合具体情况理解上述术语在本发明中的具体含义。
51.实施例
52.请参阅图1-8,本发明提供一种技术方案:一种果林自动化喷雾装置,包括运载车
1;
53.运载车1上安装有调节机构2,调节机构2的顶部安装有喷洒机构3;
54.运载车1沿果林道路巡航,并搭配调节机构2和喷洒机构3进行喷雾作业;
55.其中,运载车1包括车体101和安装于车体101前部的agv传感器102;
56.车体101包括了车轮及其传动机构,运载车1为电动车,通过车体101内部所搭载的蓄电池进行工作;
57.agv传感器102用于检测果园铺设的agv磁轨,通过与车体101的控制器交互,实现自动巡航。
58.其中,agv磁轨的铺设根据实际情况而定,主体为围绕果园的路径进行铺设,以便本装置进行无人化巡航;
59.其中,车体101的外表面安装有光伏板105;
60.光伏板105负责负责光伏转换,并与车体101的光伏逆变器联接,为车体101的蓄电池供电;
61.车体101的外表面环形阵列式安装有液压支腿103,液压支腿103通过液压缸实现俯仰调节,在调节机构2和喷洒机构3工作时,通过液压支腿103支撑于地面,加大整体装置的稳定性。
62.调节机构2根据果树的高度及形状参数,运载驱动喷洒机构3沿果树的外部以弧形路径进行动态调节;
63.具体的路径驱动模式通过控制器预先录入参数,具体参数的选择需根据果园种植的相关科研测绘数据而定;
64.调节机构2包括三组伺服电动葫芦201与钢丝绳202,还包括气囊203与连接架204;
65.伺服电动葫芦201用于驱动钢丝绳202伸缩,伺服电动葫芦201以环形阵列的方式安装于运载车1的外部;
66.气囊203上下叠加且相互连通,总体呈锥形且为一组,共三组并以三角状相互安置,每层之间的气囊203相互不连通;
67.每层之间的气囊203通过连接架204相互固定连接,每层连接架204通过钢缆相互串联;
68.气囊203的外表面固定连接有锚点201,钢丝绳202的外表面固定连接于位于最顶部的气囊203的锚点201;其余每层气囊203的锚点201的内侧壁与钢丝绳202的外表面滑动连接;
69.最顶部的气囊203的顶部固定连接有固定架205;固定架205的顶部与喷洒机构3的底部固定连接;
70.气囊203通过车体101底部的压缩气罐104供气,压缩气罐104通过气泵连通气囊203;
71.使用时,压缩气罐104预先充满气囊203,控制器通过伺服电动葫芦201拉扯钢丝绳202,因最上部的气囊203与钢丝绳202直接连接,而其余的气囊203仅起到限位钢丝绳202的作用,因此三组伺服电动葫芦201拉扯不同行程量的钢丝绳202,即可控制气囊203的顶部,也就是喷洒机构3沿着果树的外廓甚至以顶部笼罩的形式进行喷洒作业;
72.具体使用时,运载车1需判断当前路径附近的果树位置,在实际情况中可在果树旁
安置一信号收发器,与车体101的控制器进行交互,进而控制车体101的启停,进而与调节机构2和喷洒机构3进行交互作业;
73.也可以通过远程遥控的形式控制;
74.也可以通过工作人员伴随作业,以现场遥控的形式实现作业;
75.喷洒机构3根据果树的外形参数,自动驱动调节喷洒面积及外径参数;
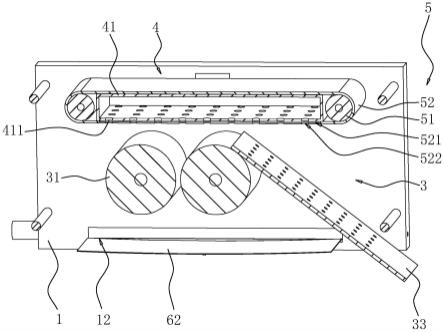
76.本实施例中,具体的:喷洒机构3包括机架301、吹浮组件和动态喷雾组件;
77.机架301为圆柱形;吹浮组件安装于机架301的底部,吹浮组件包括第一伺服电机302和与第一伺服电机302输出轴固定连接的扇叶303,用于喷雾作业时扰动果树的叶片浮动飞舞,进而提高并扩大喷洒效果;
78.动态喷雾组件的数量为二十组,并以环形阵列的方式均匀安装于机架301的上部,每组动态喷雾组件共同作业,根据果树的外形参数,自动驱动调节喷洒面积及外径参数;
79.喷洒机构3还包括第二伺服电机304、曲柄摇杆组件305和转环306;
80.第二伺服电机304的输出轴与曲柄摇杆组件305的曲柄固定连接;转环306的内侧壁转动连接于机架301的外表面;
81.动态喷雾组件包括第一铰杆307、l形架308、第二铰杆309、铰合架310和喷头311;
82.第一铰杆307的一端通过球形联轴器万向铰接于转环306的顶部,l形架308的顶部和底部分别通过球形联轴器万向铰接于第一铰杆307的另一端和第二铰杆309的一端,第二铰杆309的另一端通过球形联轴器铰接于铰合架310的外表面;
83.l形架308的中心点通过销轴铰接于机架301的外表面;
84.铰合架310的底部通过合页铰接于机架301的外表面上侧;
85.喷头311安装于铰合架310的外表面,并通过运载车1运载的水箱及水泵所提供的喷液进行喷洒作业;
86.请参阅图8,铰合架310呈s拉伸状的板体形,每个喷洒机构3的铰合架310相互贴合;
87.使用时,第二伺服电机304驱动曲柄摇杆组件305的曲柄整周旋转,进而控制摇杆带动转环306旋转,转环306的旋转带动每组第一铰杆307同步进给,进而驱动每组l形架308及第二铰杆309摆动与进给,进而推动铰合架310进行动态调节,在期间,因铰合架310铰接于机架301,故每组铰合架310只能以机架301中轴线的方向进行摆动,每组铰合架310进而实现扩张或缩放,具体驱动期间通过铰合架310呈s拉伸状的板体形实现相互配合支撑,形成直径的可变化;
88.上述直径的可变化即可带动每组喷头311所共同组成的喷洒面积进行动态化调节,进而适应不同的果树外形所带来的不同喷洒需求;
89.本实施例中,具体的:喷洒机构3中,除相应电动件外,其余所有部件均采用轻量铝合金或工程塑料制成。
90.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。