1.本发明属于交通工程技术领域,具体涉及一种智能网联汽车不停车通过交叉口的生态驾驶方法。
背景技术:
2.现有关于智能网联汽车生态驾驶的研究,如申请号为2021115540021,发明名称为一种自动驾驶车辆通过信号交叉口生态驾驶方法的发明专利申请、申请号为201810047026.x、发明名称为基于强化学习的城市道路交叉口生态驾驶行为优化方法的发明专利等,上述研究通过选择以车辆能耗最小为目标函数,建立包含满足车辆动力学约束的最优化模型,最后通过求解该最优化模型确定智能网联汽车的行驶轨迹。该方法能最大程度降低车辆在行驶过程的能量消耗,且一定程度上减少了车辆出行时间。但由于车辆能耗估计模型通常为结构复杂的非线性函数,使得建立的最优化模型难以得到解析解,而求解数值解的方法需要通过迭代使得结果收敛,迭代收敛的过程一般需要较高的计算时间,难以在实时变化的、真实的交通系统中得到实施。
技术实现要素:
3.本发明的目的在于提出一种较为简便的、运算时间快的生态驾驶方法,选择以智能网联汽车不停车通过交叉口为目标,有效避免了能耗估计模型非线性对计算效率的负担,使得车辆能以较为平顺、稳定的轨迹通过交叉口,减少了剧烈的加减速过程引起额外的能耗。采用本发明提出的生态驾驶策略,其计算时间可达毫秒级,能实际应用于智能网联汽车,缓解交通拥堵,减少交通能耗。
4.为了达到上述目的,本发明所采用的技术方案是:
5.一种智能网联汽车不停车通过交叉口的生态驾驶方法,包括以下步骤:
6.s1、获取本车速度、位置信息,前车速度、位置信息,交叉口信号相位与配时信息;
7.获取本车当前速度vn、与前车距离sn以及前车速度v
n-1
,交叉口剩余行驶时间t
last
、本车与交叉口停车线距离d
n,sl
、前车与交叉口停车线距离d
n-1,sl
、交叉口信号灯转至下一绿灯相位所需时间tg和本车至交叉口停车线的前车数n
pre
;
8.s2、计算车辆安全加速度;
9.车辆安全加速度表示为:当前车突然刹车,为避免碰撞,本车于下一时刻行驶的加速度值;考虑智能驾驶员模型(intelligent driver model,idm)可以有效满足车辆安全行驶,且在交通仿真模拟中得到广泛应用,故选用idm加速度作为车辆安全加速度a
n,idm
;
10.所述步骤s2计算车辆安全加速度,具体为:
11.由车辆当前车速、前车速度、与前车距离,计算安全加速度a
n,idm
;设当前车速为vn、前车速度为v
n-1
、与前车距离sn、本车最大速度为v
n,max
、本车最大加速度a
n,max
、安全跟车时距为τ、舒适减速度为a
n,b
、最小安全距离s0;
12.先计算车辆期望跟车间距
13.然后确定车辆安全加速度
14.s3、判断车辆能否通过交叉口;
15.由本车当前速度vn、安全加速度a
n,idm
、本车与交叉口停车线距离d
n,sl
,计算本车按原状态驶出停车线所需时间δt
sl
。比较δt
sl
与交叉口剩余行驶时间t
last
,其中信号交叉口剩余行驶时间为剩余绿灯时间和剩余黄灯时间之和;若δt
sl
≤t
last
,说明车辆能以当前状态驶过交叉口,无需生态驾驶引导,车辆将保持以安全加速度a
n,idm
行驶;反之车辆安全行驶状态不能驶出交叉口,需改变其行驶模式,进行生态驾驶诱导策略;
16.所述步骤s3判断车辆能否通过交叉口,具体为:
17.由本车当前速度vn、安全加速度a
n,idm
、车辆距交叉口停车线距离d
sl
,计算车辆按原状态驶出停车线所需时间δt
sl
,并与交叉口剩余行驶时间t
last
判断得到车辆能否通过交叉口。δt
sl
具体计算过程为:
18.1)、a
n,idm
>0,说明车辆加速,计算车辆加速至最大速度的时间若t
acc
>t
last
,t
acc
≤t
last
,
19.2)、a
n,idm
≤0,说明车辆减速,计算车辆制动时间若t
dec
>t
last
,t
dec
≤t
last
,δt
sl
=∞。
20.s4、预测车辆实际通过交叉口停车线时间;
21.当车辆不能以安全状态驶出交叉口时,车辆根据交叉口剩余行驶时间t
last
、下一绿灯相位所需时间tg、其前车速度v
n-1
、前车距交叉口停车线距离d
n-1,sl
、饱和车头时距t
hw
及本车至停车线的前车数n
pre
,预测车辆通过交叉口停车线时间t
sl
;
22.δt
sl
指车辆按自身速度和加速度计算得到的通过交叉口的时间,δt
sl
并没有考虑交通信号相位,所以当δt
sl
<t
last
时,需要再次预测本车通过交叉口的时间,即t
sl
。
23.所述步骤s4预测车辆实际通过交叉口停车线时间,具体为:
24.当车辆不能以安全状态驶出交叉口时,车辆根据其前车速度v
n-1
、前车与交叉口停车线距离d
n-1,sl
及本车至交叉口停车线的前车数n
pre
,预测车辆实际通过交叉口停车线时间t
sl
,t
sl
具体计算过程如下:
25.1)、n
pre
=0,本车为头车,在当前信号周期内无法驶出交叉口,选择在下一周期绿灯启亮时刻驶出交叉口,t
sl
=tg;
26.2)、n
pre
≠0,计算前车匀速通过交叉口所需时间若说明前车能匀速通过停车线的同时,本车也能在当前信号周期驶过停车线,此时若说明前车在当前信号周期能匀速通过停车线,但本车不能跟随前车通过停车线,此时t
sl
=tg;若说明前车不能在当前信号周期驶出交叉口停车线,此时t
sl
=tg δt n
pre
t
hw
。
27.s5、计算车辆生态加速度;
28.需根据本车与交叉口停车线距离d
n,sl
、预测车辆实际通过交叉口时间t
sl
,确定车辆不停车通过交叉口的平均速度再通过vn及单位仿真步长δt确定车辆下一时刻生态加速度
29.s6、确定车辆最终加速度;
30.考虑车辆动力学特性,生态加速度a
n,eco
应大于车辆允许的最大制动加速度a
n,min
;同时考虑车辆行车安全,车辆加速度应取生态加速度a
′n和安全加速度a
n,idm
中较小值,得到最终加速度a
′n=min(a
n,idm
,max(a
n,eco
,a
n,min
));
31.s7、车辆状态更新;
32.通过最终加速度a
′n、单位仿真步长δt计算得到本车下一时刻速度v
′n=vn a
′nδt,得到本车下一时刻与交叉口停车线的距离:
[0033][0034]
s8、车辆状态判定;
[0035]
分析本车下一时刻与交叉口停车线的距离d
′
n,sl
的大小,若d
′
n,sl
>0,说明本车仍处于交叉口内部,将按步骤s1~s6再次确定其下一时刻状态;若d
n,sl
≤0,本车已驶出交叉口,无需进行生态速度诱导,车辆将以a
n,idm
行驶直至车辆驶出交叉口。
[0036]
与现有技术相比,本发明的有益效果是:
[0037]
本发明在本车当前状态及idm加速度的基础上,以前车速度与位置、交叉口信号相位及配时为输入变量,输出后续时间车辆加速度,得到智能网联汽车时空变化轨迹,使得智能网联汽车能实现不停车通过交叉口,减少交通延误,降低交通能耗。本发明单车轨迹的求解时间约为6ms,能实际应用于智能网联汽车,使智能网联汽车实现不停车通过交叉口,有效的减少了交通拥堵,提升车辆能量利用效率。
附图说明
[0038]
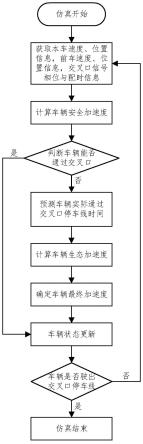
图1是本发明方法的流程图;
[0039]
图2是本发明实施例与人工驾驶的位置-时间图;
[0040]
图3本发明实施例与人工驾驶的速度-时间图;
[0041]
图4是本发明实施例与人工驾驶的加速度-时间图;
[0042]
图5是本发明实施例与人工驾驶的瞬时能耗-时间图。
具体实施方式
[0043]
下面结合说明书附图,对本发明作进一步的说明。
[0044]
实施例1
[0045]
如图1所示,本实施例中所述方法包括如下步骤:
[0046]
s1、获取本车速度、位置信息,前车速度、位置信息,交叉口信号相位与配时信息;
[0047]
有本车速度vn=10m/s、与前车距离sn=60m、与交叉口停车线距离d
n,sl
=200m,前车速度v
n-1
=12m/s,前车与交叉口的距离d
n-1,sl
=140m,本车至交叉口停车线前车数n
pre
=2、交叉口剩余行驶时间t
last
=10s、信号灯转至下一绿灯相位所需时间tg=40s。
[0048]
s2、计算车辆安全加速度;
[0049]
假定交叉口限速v
n,max
=18m/s,车辆最大加速度a
n,max
=2.5m/s2,舒适减速度a
n,b
=-2m/s,最大制动加速度a
n,min
=-4m/s2,安全跟车时距τ=1.6s,最小安全间距s0=2m,饱和车头时距t
hw
=2s,单位仿真步长δt=1s。
[0050]
计算车辆期望跟车间距
[0051]
安全加速度
[0052]
s3、判断车辆能否通过交叉口;
[0053]an,idm
>0,说明车辆加速,计算车辆加速至最大速度的时间:
[0054][0055]
有t
acc
≤t
last
=10s,δt
sl
≥t
last
,本车无法按当前状态通过交叉口,需进行生态驾驶诱导。
[0056]
s4、预测车辆实际通过交叉口停车线时间;
[0057]npre
≠0,计算前车匀速通过交叉口所需时间有说明前车不能在当前信号周期驶出交叉口停车线,t
sl
=40 1 2
×
2=45s。
[0058]
s5、计算车辆生态加速度;
[0059]
确定车辆不停车通过交叉口的平均速度:
[0060][0061]
再通过vn及单位仿真步长δt确定车辆下一时刻生态加速度:
[0062]
[0063]
s6、确定车辆最终加速度;
[0064]
最终加速度:
[0065]a′n=min(a
n,idm
,max(a
n,eco
,a
n,min
))=min(2.2,max(-5.6,-4))=-4m/s2。
[0066]
s7、车辆状态更新;
[0067]
本车下一时刻速度:
[0068]v′n=vn a
′nδt=10 (-4)
×
1=6m/s,得到本车下一时刻与交叉口停车线的距离:
[0069][0070]
s8、车辆状态判定;
[0071]dn,sl
≥0,本车仍处于交叉口内部,记录本车更新后速度、位置信息,并按步骤s1~s6再次确定其下一时刻状态,直至车辆驶出交叉口停车线。
[0072]
实施例2
[0073]
取交叉口长度为400m,一辆车长度为6m;仿真车辆具有相同的动力学参数;交叉口限速为18m/s,车辆初始速度为10m/s,车辆最大加速度为2.5m/s2,舒适减速度为-2m/s,最大制动加速度为-4m/s2,安全跟车时距为1.6s,最小安全间距为2m;信号周期时长为60s,其中绿灯30s,黄灯3s,红灯27s,信号灯初始为绿灯启亮状态。仿真编码软件为matlab,电脑显卡为intel i5-9300h,内存16gb。
[0074]
图2具体给出了本发明实施例在特定仿真环境中的运行情况。该场景存在两种轨迹,其中实施本发明生态驾驶方法的轨迹被称为生态驾驶;不实施本发明生态驾驶方法,按idm计算得到的轨迹被称为无生态驾驶。由图2可知,对于实施生态驾驶的车辆,其驶出交叉口的时间基本低于无生态驾驶状态;说明生态驾驶方法的实施有效的提升了道路通过效率,一定程度上减少了交通拥堵;以第三辆车为例,由图3-4可知,采用本方法生态驾驶的车辆,其速度和加速度随时间变化稳定,有效降低了车辆剧烈加减速过程,提升驾驶的安全性和舒适性。同时由图5可知,考虑车辆为燃油驱动,通过biggs d c、akcelik r在论文energy-related model of instantaneous fuel consumption中提出的燃油汽车瞬时能耗模型估计车辆能耗,则由图5可知生态驾驶方法下车辆的瞬时能耗显著优于无生态驾驶方法,有效降低了车辆行驶能耗。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
