1.本发明属于航空附件技术领域,具体涉及一种用于飞机风门的非相似双余度伺服装置。
背景技术:
2.飞机伺服风门主要应用在位于飞机尾端的辅助动力装置(apu),通过机上控制信号来控制空气涡轮起动机进气的通断和空气量大小的调节。在飞机起飞前,辅助动力装置(apu)向飞机主发动机提供电源和气源,在飞机飞行过程中,如果遇到主发动机空中停车时,在一定高度下,辅助动力装置(apu)可以高空启动,为发动机重新启动提供动力。因此,在提高飞机辅助动力装置(apu)可靠性的同时,增加风道阀门控制器对辅助动力装置(apu)的安全保护是非常有必要的。
3.目前,国内外飞机的伺服风门大都是马达或电动机操纵形式,而此操纵形式的装置安全裕度低,存在单一故障发生导致装置失灵等一系列问题。尤其发动机风道风门装置对可靠性和安全裕度要求高,其微小故障都可能引发灾难性的后果。因此,提高飞机风道阀门装置可靠性的一个重要方法是发展多余度技术,对此双电机形式可以有效提高可靠度,但是双电机结构形式的失效模式相同,没法完全避免电机失效率的发生。
技术实现要素:
4.有鉴于此,本发明提供一种用于飞机风门的非相似多余度伺服装置,通过在装置中设置具有电动操纵与气动操纵相兼容的操纵机构,实现飞机风门在不同操纵方式下的多余度控制。电动操纵与气动操纵之间可兼容切换,降低因相似故障引发的操纵失效问题,从而提高控制系统的可靠性,大大提高了飞行安全性。
5.为了实现上述技术目的,本发明所采用的具体技术方案为:
6.一种用于飞机风门的非相似双余度伺服装置,用于控制飞机apu的风门,包括:
7.电动机、操纵机构、气动机构以及控制组件;
8.所述电动机由所述控制组件控制,输出用于开闭所述风门的电动开关位移力矩;
9.所述气动机构用于基于所述飞机的气源或液压源输出用于开闭所述风门的气动开关位移力矩;
10.所述操纵机构用于将所述电动开关位移力矩或气动开关位移力矩传递至所述风门。
11.进一步的,所述操纵机构包括蜗轮蜗杆、太阳轮、行星轮、行星架以及内齿圈;
12.所述蜗轮蜗杆的蜗杆端与所述电动机传动设置,所述蜗轮蜗杆的蜗轮端与所述太阳轮传动设置;所述行星轮至少为两组,均与所述太阳轮啮合;
13.所述内齿圈基于内齿同时与各所述行星轮啮合;所述行星架安装在各所述行星轮上,且同时与所述风门传动设置;
14.所述气动机构与所述内齿圈传动设置;所述气动机构带动所述内齿圈执行与所述
太阳轮同轴的可锁定的转动。
15.进一步的,所述气动机构包括两位两通电磁阀、两位四通液压换向阀及作动筒;
16.所述两位两通电磁阀由所述控制组件控制,用于基于所述飞机的气源或液压源实现所述两位四通液压换向阀的阀芯往复移动;所述两位四通液压换向阀由所述两位两通电磁阀控制,用于将所述飞机的气源或液压源择路传递至所述作动筒;所述作动筒基于择路传递的所述飞机的气源或液压源输出所述气动开关位移力矩。
17.进一步的,所述作动筒包括作动筒外筒、作动筒弹簧以及作动筒活塞杆;
18.所述作动筒活塞杆的一端为活塞并设置在所述作动筒内,另一端与所述内齿圈传动设置,运动方向平行于所述作动筒的轴向;
19.所述作动弹簧设置在所述作动筒外筒内,一端作用于所述作动筒内壁,另一端作用于所述活塞,预紧力的方向平行于所述作动筒的轴向。
20.进一步的,所述气动机构还包括第一单向阀和第一调速阀;所述第一单向阀和第一调速阀并联设置,作用在所述两位四通液压换向阀的一个输出端与所述作动筒的一个输入端之间;所述第一单向阀的许通方向为所述作动筒至所述两位四通液压换向阀。
21.进一步的,所述气动机构还包括第二单向阀和第二调速阀;所述第二单向阀和第二调速阀并联设置,作用在所述两位四通液压换向阀的另一个输出端与所述作动筒的另一个输入端之间;所述第二单向阀的许通方向为所述作动筒至所述两位四通液压换向阀。
22.进一步的,所述电动机与所述蜗轮蜗杆的蜗杆端之间基于减速直齿轮系传动。
23.进一步的,所述内齿圈上设置有外齿;所述活塞杆与所述内齿圈之间基于直齿轮传动;所述直齿轮与所述内齿圈的外齿啮合。
24.进一步的,所述伺服装置还包括位移传感器;所述位移传感器用于检测所述风门的打开量;所述位移传感器的检测结果输出至所述控制组件。
25.进一步的,所述伺服装置还包括滤波器;所述滤波器与所述控制组件电连接,用于实现所述飞机的离散信号至所述控制组件的传递。
附图说明
26.为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
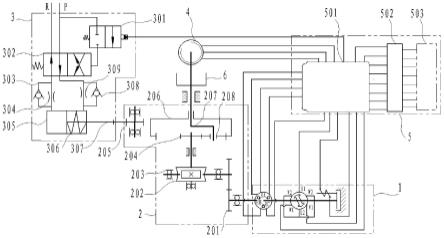
27.图1为本发明具体实施方式中一种用于飞机风门的非相似多余度伺服装置的工作原理图;
28.其中:1、电动机;2、操纵机构;201、直齿轮系;202、蜗轮蜗杆;203、轴承;204、太阳轮;205、直齿轮;206、内齿圈;207、行星架;208、行星轮;3、气动机构;301、两位两通电磁阀;302、两位四通液压换向阀;303、第一单向阀;304、第一调速阀;305、作动筒外筒;306、作动筒弹簧;307、作动筒活塞杆;308、第二单向阀;309、第二调速阀;4、角位移传感器;5、控制组件;501、控制板;502、滤波器;503、插座;6、风门。
具体实施方式
29.下面结合附图对本公开实施例进行详细描述。
30.以下通过特定的具体实例说明本公开的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本公开的其他优点与功效。显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。本公开还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本公开的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
31.要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
32.还需要说明的是,以下实施例中所提供的图示仅以示意方式说明本公开的基本构想,图示中仅显示与本公开中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
33.另外,在以下描述中,提供具体细节是为了便于透彻理解实例。然而,所属领域的技术人员将理解,可在没有这些特定细节的情况下实践所述方面。
34.在本发明的一个实施例中,提出一种用于飞机风门6的非相似双余度伺服装置,用于控制飞机apu的风门6,如图1所示,包括:
35.电动机1、操纵机构2、气动机构3以及控制组件5;
36.电动机1由控制组件5控制,输出用于开闭风门6的电动开关位移力矩;
37.气动机构3用于基于飞机的气源或液压源,输出用于开闭风门6的气动开关位移力矩;
38.操纵机构2用于将电动开关位移力矩或气动开关位移力矩传递至风门6。
39.在本实施例中,操纵机构2包括蜗轮蜗杆202、太阳轮204、行星轮208、行星架207以及内齿圈206;
40.蜗轮蜗杆202的蜗杆端与电动机1传动设置,蜗轮蜗杆202的蜗轮端与太阳轮204传动设置;行星轮208至少为两组,均与太阳轮204啮合;
41.内齿圈206基于内齿同时与各行星轮208啮合;行星架207安装在各行星轮208上,且同时与风门6传动设置;
42.气动机构3与内齿圈206传动设置;气动机构3带动内齿圈206执行与太阳轮204第二调速阀309同轴的可锁定的转动。
43.在本实施例中,气动机构3包括两位两通电磁阀301、两位四通液压换向阀302及作动筒;
44.两位两通电磁阀301由控制组件5控制,用于基于飞机的气源或液压源实现两位四通液压换向阀302的阀芯往复移动;两位四通液压换向阀302由两位两通电磁阀301控制,用
于将飞机的气源或液压源择路传递至作动筒;作动筒基于择路传递的飞机的气源或液压源输出气动开关位移力矩。
45.在本实施例中,作动筒包括作动筒外筒305、作动筒弹簧306以及作动筒活塞杆307;
46.作动筒活塞杆307的一端为活塞并设置在作动筒内,另一端与内齿圈206传动设置,运动方向平行于作动筒的轴向;
47.作动弹簧设置在作动筒外筒305内,一端作用于作动筒内壁,另一端作用于活塞,预紧力的方向平行于作动筒的轴向。
48.在本实施例中,气动机构3还包括第一单向阀303和第一调速阀304;第一单向阀303和第一调速阀304并联设置,作用在两位四通液压换向阀302的一个输出端与作动筒的一个输入端之间;第一单向阀303的许通方向为作动筒至两位四通液压换向阀302。
49.在本实施例中,气动机构3还包括第二单向阀308和第二调速阀309;第二单向阀308和第二调速阀309并联设置,作用在两位四通液压换向阀302的另一个输出端与作动筒的另一个输入端之间;第二单向阀308的许通方向为作动筒至两位四通液压换向阀302。
50.在本实施例中,电动机1与蜗轮蜗杆202的蜗杆端之间基于直齿轮系201传动。
51.在本实施例中,内齿圈206上设置有外齿;活塞杆与内齿圈206之间基于直齿轮205传动;直齿轮205与内齿圈206的外齿啮合。
52.在本实施例中,伺服装置还包括位移传感器;位移传感器用于检测风门6的打开量;检测结果输出至控制组件5。
53.在本实施中,位移传感器为角位移传感器4。
54.在本实施例中,伺服装置还包括滤波器502;滤波器502与控制组件5电连接,用于实现飞机的离散信号至控制组件5的传递。
55.本实施例的用于飞机风门6的非相似双余度伺服装置,包括电动机1、操纵机构2、气动机构3、角位移传感器4、控制组件5和风门6,电动机1法兰安装板通过螺栓与操纵机构2壳体连接,气动机构3法兰安装板通过螺栓与操纵机构2壳体连接,操纵机构2与风门6通过花键或支口形式连接;角位移传感器4法兰安装板通过螺栓与操纵机构2壳体连接,转动轴通过平键与风门6输出轴连接;控制组件5安装在操纵机构2壳体中;操纵机构2包括直齿轮205系201、蜗轮蜗杆202、轴承203、太阳轮204、直齿轮205、内齿圈206、行星架207和行星轮208;气动机构3高度集成,包括两位两通电磁阀301、两位四通液压换向阀302、第一单向阀303、第二单向阀308、第一调速阀304、第二调速阀309、作动筒外筒305、作动筒弹簧306和作动筒活塞杆307,作动筒无杆腔侧设置并联布置的第一单向阀303和第一调速阀304,作动筒有杆腔侧设置并联布置的第二单向阀308和第二调速阀309,并且第一单向阀303和第二单向阀308同方向设置,通过第一调速阀304、第二调速阀309,实现作动筒活塞杆307平稳运动,同时通过第一调速阀304、第二调速阀309起到调节风门6转动速度的作用;控制组件5包括控制板501、滤波器502和插座503,控制组件5集成在操纵机构2壳体中,通过插座503与机上相连通;风门6包括阀体、阀瓣、密封板、连接轴、堵塞和轴承203,结构形式有球阀、插板阀和蝶阀。
56.操纵机构2中内齿圈206外齿通过直齿轮205与作动筒活塞杆307齿条相啮合,内齿圈206外表面通过特殊工艺粘贴改性聚四氟乙烯织物,实现低摩擦力矩转动,并且可通过调
整弹簧的预紧力消除齿轮啮合的间隙,实现轮系中内齿圈206外齿和直齿轮205与作动筒活塞杆307齿条之间零间隙啮合,直齿轮205系201一端通过插销与电动机1输出轴连接,另一端通过锁紧螺母与蜗轮蜗杆202连接;角位移传感器4常采用精密导电电位器或rvdt,实现角度位置的同步反馈。
57.气动机构3的介质直接来源于辅助动力装置apu引气,取用便捷。
58.本实施例的用于飞机风门6的非相似双余度伺服装置具备以下特点:
59.非相似双余度设计
60.为了防止相似故障引发的功能失效,在设计时将电动操纵与气动操纵相结合,进而有效地避免了相似故障的发生,真正提高了产品的可靠性。
61.组合化设计
62.为了便于外场快速、准确的实现对装置的操纵和维护,将操纵机构2、气动机构3、风门6设计成组合式,操纵机构2和风门6的安装端面有法兰安装板,气动机构3和操纵机构2的安装端面有法兰安装板,并且操纵机构2的壳体安装法兰端面的台阶孔内加工与其相对应的环形凹槽,保证气动机构3和风门6安装时的同轴度。
63.集成化设计
64.气动机构3中将两位两通电磁阀301、两位四通液压换向阀302、第一单向阀303、第二单向阀308、第一调速阀304、第二调速阀309和作动筒高度集成到一个阀块,实现了体积小、重量轻和维护方便的要求。
65.零间隙设计
66.内齿圈206外齿和直齿轮205与作动筒活塞杆307齿条之间的连接方式为齿轮齿条啮合,在作动筒活塞杆307处设置弹簧,可通过调整弹簧的压缩量,消除齿轮齿条啮合的间隙,实现内齿圈206外齿、直齿轮205与作动筒活塞杆307齿条之间零间隙啮合。
67.低摩擦力小体积设计
68.内齿圈206是电动操纵与气动操纵之间转换的关键部件,外表面通过特殊工艺粘贴改性聚四氟乙烯织物,实现轮系中内齿圈206转动的低摩擦力和小体积。
69.通用化和系列化设计
70.气动机构3高度集成在一起,可通过更换不同的工作介质,如液压油、煤油、空气、氮气等,实现不同介质间的通用化和系列化。
71.本实施例的工作原理是:
72.1、当电动机1工作时,气动机构3不工作。具体为控制板501给电磁阀断电,介质经过两位四通液压换向阀302的左位、第二单向阀308进入作动筒活塞杆307有杆一腔,作动筒活塞杆307在介质作用力的作用下运动至左极限位置,并且在弹簧的预紧力的作用下,通过活塞杆齿条与直齿轮205将操纵机构2中内齿圈206外齿可靠锁定,同时调节弹簧的压缩量,进而实现齿轮间零间隙的调节。
73.a机上发出操作指令,装置通过控制组件5中插座503采集到的风门6打开指令,控制板501离散量信号解析处理实现风门6打开指令,控制电动机1正转,通过操纵机构2输出轴带动风门6往打开方向动作,角位移传感器4将采集到的风门6打开到位信号反馈至控制板501的同时通过插座503反馈至机上,控制板501给出电动机1停止工作指令。全工作过程中,角位移传感器4实时采集信号,并及时、准确将风门6所处的角度位置反馈至控制组件5
和机上,机上结合进气量需求,发出控制电流信号,控制组件5中模拟电流采集处理电路对控制电流进行采集处理,驱动电动机1完成转动方向和转动速度指令信息功能,从而对风门6开度实时进行控制;
74.b机上发出操作指令,装置通过控制组件5中插座503采集到的风门6关闭指令,控制板501离散量信号解析处理实现风门6关闭指令,控制电动机1反转,通过操纵机构2输出轴带动风门6往关闭方向动作,角位移传感器4将采集到的风门6关闭到位信号反馈至控制板501的同时通过插座503反馈至机上,控制板501给出电动机1停止工作指令。全工作过程中,角位移传感器4实时采集信号,并及时、准确地将风门6所处的角度位置反馈至控制组件5和机上,机上结合进气量需求,发出控制电流信号,控制组件5中模拟电流采集处理电路对控制电流进行采集处理,驱动电动机1完成转动方向和转动速度指令信息功能,从而对风门6开度实时进行控制。
75.2、当气动机构3工作时,控制板501发出电动机1断电指令,电动机1不工作,同时操纵机构2中蜗轮蜗杆202自锁,将太阳轮204锁定不动,气动机构3输出力经内齿圈206通过行星架207输出转动力矩。
76.a机上发出操作指令,装置通过控制组件5中插座503采集到的风门6打开指令,控制板501给气动机构3中两位两通电磁阀301通电,一路高压介质经过电磁阀右位进入两位四通液压换向阀302右侧,液压力克服其弹簧力,推动两位四通液压换向阀302阀芯向左运动,通路切换至两位四通液压换向阀302右位后,另一路高压介质经过两位四通液压换向阀302的右位、第一单向阀303,进入作动筒无杆腔,液压力克服弹簧预紧力和负载力,使活塞杆向伸出方向运动,经直齿轮205推动操纵机构2轮系中内齿圈206转动,太阳轮204被锁定不动,行星架207随行星轮208做相应转动,通过输出轴带动风门6往打开方向转动,其中介质回油路经作动筒无杆腔、第二调速阀309调节速度、两位四通液压换向阀302进入回路;
77.b机上发出操作指令,装置通过控制组件5中插座503采集到的风门6关闭指令,控制板501给气动机构3中两位两通电磁阀301断电,在其弹簧力作用下将一路高压通道隔离,两位四通液压换向阀302弹簧力推动阀芯向右运动,通路切换至两位四通液压换向阀302左位后,另一路高压介质经过两位四通液压换向阀302的左位、第二单向阀308,进入作动筒有杆腔,使活塞杆向缩回方向运动,经直齿轮205推动操纵机构2轮系中内齿圈206反向转动,太阳轮204被锁定不动,行星架207随行星轮208做相应转动,通过输出轴带动风门6往关闭方向转动,其中介质回油路经第一调速阀304调节速度、换向阀进入回路;
78.c全工作过程中,角位移传感器4实时采集信号,并及时、准确将风门6所处的角度位置反馈至控制组件5和机上,机上结合进气量需求,发出控制电流信号,控制组件5中模拟电流采集处理电路对控制电流进行采集处理,驱动电动机1完成指令信息功能,从而对风门6开度实时进行控制,结合进气量需求,通过两位两通电磁阀301通电、断电指令对风门6打开角度实时控制。
79.本实施例一种用于飞机风门6的非相似双余度伺服装置,通过在装置中设置具有气动操纵与电动操纵相兼容的操纵机构2,实现飞机风道风门6高可靠性地控制,降低了相似故障引起的失效问题,大大提高了飞行安全性。同时非相似双余度装置集成度高、重量轻、控制逻辑简单,并且可使用不同的介质作为能源,可应用至其他领域,具有很高的实际利用价值。
80.以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
