1.本发明涉及道路交通技术领域,特别是涉及一种评价车让人执法摄像头对行人过街二次冲突影响的方法。
背景技术:
2.随着我国经济的发展,道路交通状况也随之日益复杂,行人作为道路上的弱势群体,其过街安全问题也日益严重。在一些无信控过街通道处,一些城市设置了车让人执法摄像头,用以提高车辆让行率。这类措施可以为行人提供路权,同时显著提高了车辆的让行率,但是此类措施对于人车冲突的影响仍是未知的,尤其是行人与车辆的二次冲突。
3.此前对于行人过街安全的研究多集中在行人过街行为、车辆让行率以及行人事故等问题,对于行人过街冲突的研究较少。本方法针对南京市车让人执法摄像头设置了对照实验,研究了无信控过街通道处执法摄像头对于行人过街二次冲突的影响,对评价和改进车让人执法摄像头等无信控过街通道处的安全措施和改善行人交通安全具有重要意义。
技术实现要素:
4.为了解决上述存在的问题,本发明提供一种评价车让人执法摄像头对行人过街二次冲突影响的方法,能够较为准确的评估无信控过街通道车让人执法摄像头对行人二次冲突的影响,为行人交通安全水平评价以及车让人执法摄像头的安装选址提供了科学有效的方法,为达此目的,本发明提供一种评价车让人执法摄像头对行人过街二次冲突影响的方法,包括如下步骤:
5.s1、调查区域选择及数据采集;
6.选取两组无信控过街通道,一组对照组(未安装摄像头)与一组实验组(安装了摄像头)。两组实验地点需位于同一路段的,以此保证交通量和交通状态一致;
7.本方法所用数据集包括:行人与车辆第一次冲突严重程度c1、行人与车辆第二次冲突严重程度c2、行人属性变量、车辆属性变量与环境变量;
8.s2、提取行人与车辆的二次冲突:本方法中的行人二次冲突指一位行人在过街时先后与两辆车发生冲突,且二次冲突分别发生于过街的两个阶段(以道路中线为分割)。提取完二次冲突后,即根据风险感知,人为的对冲突进行分级。行人与车辆第一次冲突严重程度c1(无冲突时c1=0,轻微冲突时c1=1,严重冲突时c1=2)、行人与车辆第二次冲突严重程度c2(无冲突时c2=0,轻微冲突时c2=1,严重冲突时c2=2);
9.s3、提取行人属性变量、车辆属性变量以及环境变量:提取实验地点的相关变量,行人中是否有小孩c(行人中有小孩时c=1,否则c=0)、行人同行过街人数n、行人过街时是否分神d(分神时d=1,否则d=0)、行人过街时是否使用了斑马线u1(第一个过街阶段)和u2(第二个过街阶段)(行人使用斑马线u1/u2=1,否则u1/u2=0)、行人接受车辆间隙时间g1(第一个过街阶段)和g2(第二个过街阶段)、行人过街平均速度sp1(第一个过街阶段)和sp2(第二个过街阶段)、行人过街前的不成功试探次数at1(第一个过街阶段)和at2(第二个过街阶
段)、行人过街前拒绝的车辆间隙个数r1(第一个过街阶段)和r2(第二个过街阶段)、行人遇到车辆类型v1(第一个过街阶段)和v2(第二个过街阶段)(车辆为小轿车时v1/v2=1,车辆为货车或者7座及以上客车时v1/v2=0)、前车是否未让行y1(第一个过街阶段)和y2(第二个过街阶段)(前方车辆未让行时y1/y2=1,否则y1/y2=0)、行人与车辆冲突时间隔的车道数l1(第一个过街阶段)和l2(第二个过街阶段)、车辆上游平均速度sv1(第一个过街阶段)和sv2(第二个过街阶段)、过街通道处是否安装了车让人执法摄像头in(安装时in=1,否则in=0);
10.s4、评价模型选择及参数标定:由于本方法需要针对行人与车辆第一次冲突严重程度c1和行人与车辆第二次冲突严重程度c2同时建模,因此选取双变量定序probit模型(bivariate ordered probit model)进行分析。将行人与车辆第一次冲突严重程度c1和行人与车辆第二次冲突严重程度c2作为因变量输入模型中,并将权利要求书(3)中的变量作为自变量输入模型中。在模型中,和为衡量行人二次冲突风险的两个隐变量,βn为模型估计出的每个自变量的参数,ε
i,1
和ε
i,2
为遵循双变量probit分布的误差项,ρ为误差项之间的相关系数。根据模型估计出的参数结果,可以得到出变量in(是否安装车让人执法摄像头)对于两次人车冲突的的参数β
in1
和β
in2
。当β
in1
大于0时,说明安装车让人执法摄像头会使行人的第一次冲突更严重,反之亦然。当β
in2
大于0时,说明安装车让人执法摄像头会使行人的第二次冲突更严重,反之亦然。
[0011][0012][0013][0014]
β1x
i,1
=β
c1
*c β
n1
*n β
d1
*d β
u1
*u1 β
g1
*g1 β
sp1
*sp1 β
at1
*at1 β
r1
*r1 β
v1
*v1 β
y1
*y1 β
l1
*l1 β
sv1
*
sv1
β
in1
*in(4)
[0015]
β2x
i,2
=β
c2
*c β
n2
*n β
d2
*d β
u2
*u2 β
g2
*g2 β
sp2
*sp2 β
at2
*at2 β
r2
*r2 β
v2
*v2 β
y2
*y2 β
l2
*l2 β
sv2
*
sv2
β
in
*in(5)
[0016]
根据本发明的另一方面,提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明的评价车让人执法摄像头对行人过街二次冲突影响的方法中的步骤。
[0017]
根据本发明的又一方面,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本发明的评价车让人执法摄像头对行人过街二次冲突影响的方法中的步骤。
[0018]
本发明的有益效果:通过选取无信控过街通道作为研究对象,利用双变量定序probit模型研究车让人执法摄像头对于人车二次冲突造成的影响。
附图说明
[0019]
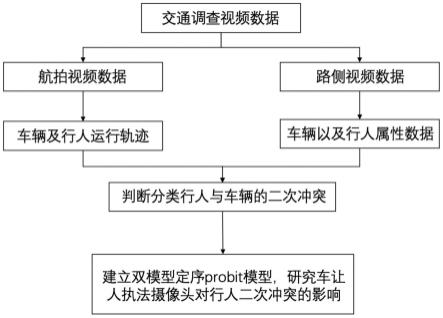
图1为本发明的方法流程示意图。
具体实施方式
[0020]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0021]
本发明提供一种评价车让人执法摄像头对行人过街二次冲突影响的方法,能够准确的评估无信控过街通道车让人执法摄像头对行人过街二次冲突的影响。
[0022]
如图1所示,一种评价车让人执法摄像头对行人过街二次冲突影响的方法,包括如下步骤:
[0023]
s1、调查区域选择及数据采集:在本方法中,需要选取两组无信控过街通道,一组对照组(未安装摄像头)与一组实验组(安装了摄像头)。两组实验地点需位于同一路段的,以此保证交通量和交通状态一致。本方法所用数据集包含,行人与车辆第一次冲突严重程度c1、行人与车辆第二次冲突严重程度c2、行人属性变量、车辆属性变量与环境变量;
[0024]
s2、提取行人与车辆的二次冲突:本方法中的行人二次冲突指一位行人在过街时先后与两辆车发生冲突,且二次冲突分别发生于过街的两个阶段(以道路中线为分割)。提取完二次冲突后,即根据风险感知,人为的对冲突进行分级。行人与车辆第一次冲突严重程度c1(无冲突时c1=0,轻微冲突时c1=1,严重冲突时c1=2)、行人与车辆第二次冲突严重程度c2(无冲突时c2=0,轻微冲突时c2=1,严重冲突时c2=2);
[0025]
(3)提取行人属性变量、车辆属性变量以及环境变量:提取实验地点的相关变量,行人中是否有小孩c(行人中有小孩时c=1,否则c=0)、行人同行过街人数n、行人过街时是否分神d(分神时d=1,否则d=0)、行人过街时是否使用了斑马线u1(第一个过街阶段)和u2(第二个过街阶段)(行人使用斑马线u1/u2=1,否则u1/u2=0)、行人接受车辆间隙时间g1(第一个过街阶段)和g2(第二个过街阶段)、行人过街平均速度sp1(第一个过街阶段)和sp2(第二个过街阶段)、行人过街前的不成功试探次数at1(第一个过街阶段)和at2(第二个过街阶段)、行人过街前拒绝的车辆间隙个数r1(第一个过街阶段)和r2(第二个过街阶段)、行人遇到车辆类型v1(第一个过街阶段)和v2(第二个过街阶段)(车辆为小轿车时v1/v2=1,车辆为货车或者7座及以上客车时v1/v2=0)、前车是否未让行y1(第一个过街阶段)和y2(第二个过街阶段)(前方车辆未让行时y1/y2=1,否则y1/y2=0)、行人与车辆冲突时间隔的车道数l1(第一个过街阶段)和l2(第二个过街阶段)、车辆上游平均速度sv1(第一个过街阶段)和sv2(第二个过街阶段)、过街通道处是否安装了车让人执法摄像头in(安装时in=1,否则in=0);
[0026]
(4)评价模型选择及参数标定:由于本方法需要针对行人与车辆第一次冲突严重程度c1和行人与车辆第二次冲突严重程度c2同时建模,因此选取双变量定序probit模型(bivariate ordered probit model)进行分析。将行人与车辆第一次冲突严重程度c1和行人与车辆第二次冲突严重程度c2作为因变量输入模型中,并将权利要求书(3)中的变量作为自变量输入模型中。在模型中,和为衡量行人二次冲突风险的两个隐变量,βn为模型估计出的每个自变量的参数,ε
i,1
和ε
i,2
为遵循双变量probit分布的误差项,ρ为误差项之间的相关系数。根据模型估计出的参数结果,可以得到出变量in(是否安装车让人执法摄像头)对于两次人车冲突的的参数β
in1
和β
in2
。当β
in1
大于0时,说明安装车让人执法摄像头会使行人的第一次冲突更严重,反之亦然。当β
in2
大于0时,说明安装车让人执法摄像头会使行人的第二次冲突更严重,反之亦然。
[0027][0028][0029][0030]
β1x
i,1
=β
c1
*c β
n1
*n β
d1
*d β
u1
*u1 β
g1
*g1 β
sp1
*sp1 β
at1
*at1 β
r1
*r1 β
v1
*v1 β
y1
*y1 β
l1
*l1 β
sv1
*
sv1
β
in1
*in(4)
[0031]
β2x
i,2
=β
c2
*c β
n2
*n β
de2
*d β
u2
*u2 β
g2
*g2 β
sp2
*sp2 β
at2
*at2 β
r2
*r2 β
v2
*v2 β
y2
*y2 β
l2
*l2 β
sv
*
sv2
β
in2
*in(5)
[0032]
下面用具体实施例来说明本发明。
[0033]
(1)调查区域选择及数据采集:在本方法中,需要选取两组无信控过街通道,一组对照组(未安装摄像头)与一组实验组(安装了摄像头)。两组实验地点需位于同一路段的,以此保证交通量和交通状态一致。本方法所用数据集包含,行人与车辆第一次冲突严重程度c1、行人与车辆第二次冲突严重程度c2、行人属性变量、车辆属性变量与环境变量;
[0034]
(2)提取行人与车辆的二次冲突:本方法中的行人二次冲突指一位行人在过街时先后与两辆车发生冲突,且二次冲突分别发生于过街的两个阶段(以道路中线为分割)。提取完二次冲突后,即根据风险感知,人为的对冲突进行分级。行人与车辆第一次冲突严重程度c1(无冲突时c1=0,轻微冲突时c1=1,严重冲突时c1=2)、行人与车辆第二次冲突严重程度c2(无冲突时c2=0,轻微冲突时c2=1,严重冲突时c2=2);
[0035]
(3)提取行人属性变量、车辆属性变量以及环境变量:提取实验地点的相关变量,行人中是否有小孩c(行人中有小孩时c=1,否则c=0)、行人同行过街人数n、行人过街时是否分神d(分神时d=1,否则d=0)、行人过街时是否使用了斑马线u1(第一个过街阶段)和u2(第二个过街阶段)(行人使用斑马线u1/u2=1,否则u1/u2=0)、行人接受车辆间隙时间g1(第一个过街阶段)和g2(第二个过街阶段)、行人过街平均速度sp1(第一个过街阶段)和sp2(第二个过街阶段)、行人过街前的不成功试探次数at1(第一个过街阶段)和at2(第二个过街阶段)、行人过街前拒绝的车辆间隙个数r1(第一个过街阶段)和r2(第二个过街阶段)、行人遇到车辆类型v1(第一个过街阶段)和v2(第二个过街阶段)(车辆为小轿车时v1/v2=1,车辆为货车或者7座及以上客车时v1/v2=0)、前车是否未让行y1(第一个过街阶段)和y2(第二个过街阶段)(前方车辆未让行时y1/y2=1,否则y1/y2=0)、行人与车辆冲突时间隔的车道数l1(第一个过街阶段)和l2(第二个过街阶段)、车辆上游平均速度sv1(第一个过街阶段)和sv2(第二个过街阶段)、过街通道处是否安装了车让人执法摄像头in(安装时in=1,否则in=0);
[0036]
结合第一步,第二步以及第三步得到的相关数据如表1所示。
[0037]
表1调查区域数据采集统计表
[0038][0039]
(4)评价模型选择及参数标定:由于本方法需要针对行人与车辆第一次冲突严重程度c1和行人与车辆第二次冲突严重程度c2同时建模,因此选取双变量定序probit模型(bivariate ordered probit model)进行分析。将行人与车辆第一次冲突严重程度c1和行人与车辆第二次冲突严重程度c2作为因变量输入模型中,并将权利要求书(3)中的变量作为自变量输入模型中。在模型中,和为衡量行人二次冲突风险的两个隐变量,βn为模型估计出的每个自变量的参数,ε
i,1
和ε
i,2
为遵循双变量probit分布的误差项,ρ为误差项之间的相关系数。根据模型估计出的参数结果,可以得到出变量in(是否安装车让人执法摄像头)对于两次人车冲突的的参数β
in1
和β
in2
。当β
in
大于0时,说明安装车让人执法摄像头会使行人的第一次冲突更严重,反之亦然。当β
in
大于0时,说明安装车让人执法摄像头会使行人的第二次冲突更严重,反之亦然。
[0040][0041][0042][0043]
β1x
i,1
=β
c1
*c β
n1
*n β
d1
*d β
u1
*u1 β
g1
*g1 β
sp1
*sp1 β
at1
*at1 β
r1
*r1 β
v1
*v1 β
y1
*y1 β
l1
*l1 β
sv1
*sv1 β
in1
*in
[0044]
β2x
i,2
=β
c2
*c β
n2
*n β
d2
*d β
u2
*u2 β
g2
*g2 β
sp
*sp2 β
at2
*at2 β
r2
*r2 β
v2
*v2 β
y2
*y2 β
l2
*l2 β
sv2
*sv2 β
in2
*in
[0045]
表2双变量模型参数标定表
[0046][0047]
由于该实施案例是基于假设条件进行,根据最终的参数标定表(表2),假定β
in
和β
in2
均为正值,即说明安装车让人执法摄像头会增加一次和二次人车冲突的严重程度,其余参数以此类推。
[0048]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。