1.本发明涉及飞机冲突解脱方法及系统,具体涉及一种基于多机群的飞机交通冲突解脱方法及系统。
背景技术:
2.飞机作为现代空中兵力部署的重要武器之一,编队飞行有着单机飞行不可比拟的优势,编队协同作战是拓展探测视野、扩大空中对抗优势、提高整体作战能力和任务成功率的重要手段,同时远距离控制打击也是编队机组所需要的完成的任务,编队飞机之间的近距离冲突解脱成为了多机群飞行的难题,为了避免多机群之间发生撞击,出现了飞机冲突解脱系统,但是现有的飞机解脱系统不能预先对多机群的预飞路线进行模拟,不能避免发生冲突的概率,另外现有的飞机解脱系统在发生冲突后依靠飞行员不能解脱时,不能依靠解脱系统自行控制机群进行解脱,达不到现今使用的要求。
技术实现要素:
3.发明目的:本发明的一个目的是提供一种基于多机群的飞机交通冲突解脱方法,解决不对预飞路线模拟,冲突发生概率高的问题。
4.本发明的另一目的是提供一种基于多机群的飞机交通冲突解脱系统,解决现有飞行解脱不能预先对多机群的预飞路线进行模拟的问题。
5.技术方案:本发明所述的基于多机群的飞机交通冲突解脱方法,包括以下步骤:
6.根据机群的飞行信息针对各机群生成预飞路线;
7.采用预设的冲突判断准则判断预飞路线在三维空间坐标情况下是否发生冲突;
8.判断结果为发生冲突则进行模拟路线冲突报警;
9.判断结果为不发生冲突则根据预飞路线控制机群飞行,并采集机群的实时飞行信息,根据飞行信息生成实际飞行路线;
10.比对实际飞行路线和预飞路线是否发生偏移,若偏移超过预设的范围则进行飞行路线偏移报警,同时采用预设的冲突判断准则判断实际飞行路线在三维坐标系中是否发生冲突,判断结果为发生冲突则进行实飞路线冲突报警;
11.根据机群实际飞行路线、飞行的高度、位置和空速判断冲突的位置,根据冲突的位置信息生成解脱冲突路线,根据解脱冲突路线控制机群解脱冲突。
12.在本发明一个实施例中,在生成解脱冲突路线后,若空速超过预设范围值则启动强制操控解脱冲突,可以在发生冲突后依靠飞行员不能解脱时进行自动强制解脱冲突。
13.在本发明的一个实施例中,机群的飞行信息包括飞行路线、时间和空速。
14.本发明所述的基于多机群的飞机交通冲突解脱系统,包括:
15.机群飞行路线模拟模块,用于根据机群的飞行信息生成预飞路线;
16.冲突判定模块,用于采用预设的冲突判断准则判断预飞路线是否发生冲突,以及实际飞行路线与预飞路线偏移超过预设范围时,采用预设的冲突判断准则判断实际飞行路
线是否发生冲突;
17.预警模块,用于模拟路线冲突报警,行飞行路线偏移报警和实飞路线冲突报警;
18.机群飞行控制模块,用于根据预飞路线控制机群飞行;
19.实际飞行路线处理模块,用于采集机群的实时飞行信息,根据飞行信息生成实际飞行路线;
20.解脱冲突处理模块,用于根据机群实际飞行路线、飞行的高度、位置和空速判断冲突的位置,根据冲突的位置信息生成解脱冲突路线,根据解脱冲突路线控制机群解脱冲突。
21.本发明的一个实施例中,还包括机群强行控制模块,其设置在机群飞行器上,用于在生成解脱冲突路线后,若空速超过预设范围值强行控制机群按照解脱冲突路线飞行。
22.本发明的一个实施例中,还包括gps定位模块、高度测量模块和空速测量模块,均设置在机群飞行器上,gps定位模块检测飞行器的实时位置,高度测量模块检测飞行器的实时高度,空速测量模块检测飞行器的实时速度。
23.本发明的一个实施例中,还包括信息接收模块,用于对机群飞行的数据进行接收。
24.本发明的一个实施例中,还包括信息处理模块,对信息接收模块接收的信息进行处理,使机群位置以同一坐标系原点为基准呈现在三维空间立体坐标系中并通过处理后的数据与冲突判定预设值、飞行路线偏移预设值和空速预设值相比对。
25.本发明的一个实施例中,还包括显示模块,对信息处理模块中处理后的数据、机群模拟飞行的路线以及机群实际飞行的路线进行显示。
26.有益效果:本发明通过机群飞行路线模拟模块生成机群预飞路线,并使得预飞路线与冲突判定准则模块中的判定数值相比对,生成最优的机群预飞飞行路线,机群根据预飞路线进行飞行,有效地避免了多机群之间发生交通冲突的风险。
附图说明
27.图1为本发明的流程示意图;
28.图2为本发明预警模块的模块图;
29.图3为本发明飞机的内置模块图。
具体实施方式
30.下面结合附图和实施例对本发明进行进一步说明。
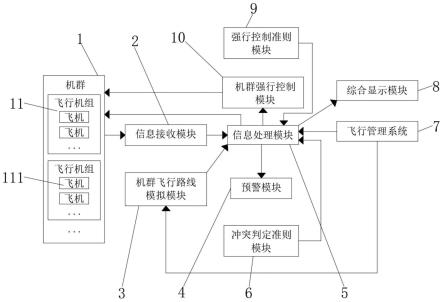
31.请参阅图1-3,本发明公开的基于多机群的飞机交通冲突解脱系统,包括机群1、信息接收模块2、机群飞行路线模拟模块3、预警模块4、信息处理模块5、冲突判定模块6、飞行管理系统7、显示模块8、强行控制判定模块9、机群强行控制模块10;
32.信息接收模块2,用于对机群1飞行的数据进行接收;
33.机群飞行路线模拟模块3,配合飞行管理系统7中的数据,用于对机群1预飞的路线进行模拟;
34.预警模块4,用于对机群1发生冲突以及具有发生冲突可能的情况进行预警;
35.信息处理模块5,对信息接收模块2接收的信息进行处理,并通过处理后的数据与冲突判定模块6和强行控制判定模块9相比对,以便及时预警、控制;
36.冲突判定模块6,判定机群1是否发生冲突;
37.飞行管理系统7,用于管理所有飞行器的飞行路线;
38.显示模块8,对信息处理模块5中处理后的数据、机群1模拟飞行的路线以及机群1实际飞行的路线进行显示;
39.强行控制判定模块9,作为判定是否强行控制机群1进行飞行;
40.机群强行控制模块10,用于强行控制机群1进行飞行。
41.本领域技术人员可以理解为,上述实施例提供的基于多机群的飞机交通冲突解脱系统,在机群1飞行前,把机群1预飞的路线、时间、空速输入到机群飞行路线模拟模块3中,并配合飞行管理系统7中所有飞行器的线路,生成机群1预飞的路线,并把路线信息传输给信息处理模块5,信息处理模块5提取冲突判定准则模块6中的数据与预飞的路线进行比对,判断是否会发生冲突,当会发生冲突时,模拟路线冲突预警401发出警示音,当预飞路线不发生冲突时,根据信息处理模块5中的机群1预飞路线控制机群1中的飞行机组11进行飞行,同时飞机111中的gps定位模块1111、高度测量模块1112、空速测量模块1113实时、持续对机群1的位置、高度以及空速进行检测,并利用信息传输模块1114把采集到的数据传输到信息接收模块2中,信息接收模块2把数据传输给信息处理模块5中生成机群1实际飞行路线图,当机群1实际飞行路线图与预飞路线图相偏移时,此时表明实际飞行路线与预飞路线相偏离,飞行路线偏移预警402发出警示音,同时信息处理模块5把飞行管理系统7中的飞行器航线与机群1此时的路线相融合,配合冲突判定准则模块6中的数据判断机群1按照此时的路线是否会发生冲突,当会发生冲突时,实飞路线冲突预警403发出警示音,同时信息处理模块5根据机群1此时的实际飞行路线以及高度、位置以及空速判断冲突的位置,并配合强行控制准则模块9中的数据自行生成最优的解脱冲突路线,当空速较高不便于飞行员进行操作时,机群强行控制模块10自行启动,把机群1解脱冲突的最优路线传输到强行操控模块1115中,通过强行操控模块1115强制控制机群1解脱冲突。
42.作为优选,预警模块4包括模拟路线冲突预警401、飞行路线偏移预警402以及实飞路线冲突预警403;
43.模拟路线冲突预警401,对机群1模拟飞行路线产生的冲突进行预警;
44.飞行路线偏移预警402,对机群1偏离模拟飞行路线的情况进行预警;
45.实飞路线冲突预警403,对机群1实际飞行中产生交通冲突的情况进行预警。
46.本领域技术人员可以理解为,通过模拟路线冲突预警401、飞行路线偏移预警402以及实飞路线冲突预警403对机组可能发生冲突的情况进行预警,起到提醒工作人员和驾驶人员的作用,以便及时解除危险。
47.作为优选,机群1包括若干个飞行机组11,飞行机组11包括若干个飞机111,飞机111上设置有gps定位模块1111,飞机111上设置有高度测量模块1112,飞机111上设置有空速测量模块1113,飞机111上设置有信息传输模块1114,飞机111上设置有强行操控模块1115。
48.通过gps定位模块1111对机群1中单个飞机111的实时位置进行检测,通过高度测量模块1112对机群1中单个飞机111的实时高度进行检测,通过空速测量模块1113对机群1中单个飞机111的实时速度进行检测,通过信息传输模块1114把gps定位模块1111、高度测量模块1112、空速测量模块1113检测到的数据传输到信息接收模块2中,通过强行操控模块1115接收机群强行控制模块10的数据,对机群1进行强行自动控制。
49.利用gps定位模块、高度测量模块、空速测量模块实时、持续对机群的位置、高度以及空速进行检测,并通过信息处理模块根据检测到的位置、高度、空速数据生成机群实际飞行路线图,通过生成的实际飞行路线和预飞飞行路线相比对,判断机群实际飞行的路径是否与预飞飞行路线相匹配,实现了对机群的实际飞行路线进行检测的功能。
50.当实际飞行路线与预飞路线不匹配时,使得飞行管理系统中的飞行器航线与机群此时的路线相融合,配合冲突判定模块中的数据判断机群按照此时的路线是否会发生冲突,会发生冲突时,信息处理模块根据机群此时的实际飞行路线以及高度、位置以及空速判断冲突的位置,并配合强行控制判定模块中的数据自行生成最优的解脱冲突路线,当空速较高不便于飞行员进行操作时,机群强行控制模块自行启动,把机群解脱冲突的最优路线传输到强行操控模块中,通过强行操控模块强制控制机群解脱冲突,实现了机群紧急自行解脱冲突的功能。
51.冲突判定模块6内部预设的冲突判定数值可以通过计算机进行更改。
52.通过计算机可以更改冲突判定准则模块6内部的冲突判定数值,以便对不同机群1冲突界定的范围进行更改,其中预设冲突判定准则是对飞行器预期路径高度层的空间组划分覆盖构造子空间,以哈希表实现目标快速分组,在现行的飞行间隔规定为基础,判定垂直空间及水平空间间距需求,快速构建保护区域,并判断飞行器之间是否安全。
53.强行控制判定模块9内部预设的达到强行控制的数值可以通过计算机进行更改。
54.通过计算机可以更改强行控制判定模块9内部对机群1强行控制的临界数值。
55.机群强行控制模块10内部设置有控制信号发射模块,控制信号发射模块与强行操控模块1115无线连接。
56.通过机群强行控制模块10的控制信号发射模块把对机群1进行控制的信号发出,并使得信号被强行操控模块1115接收,通过强行操控模块1115强行控制机群1的飞行路线。
57.本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,
可以存储在一个计算机可读取存储介质中。
58.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。