1.本发明涉及一种吨包袋提绳单绳串联系绳装置,属于一种自动化包装机械。
背景技术:
2.吨包袋是一种用于粉状物料包装运转的包装设备。通常吨包袋采用人工将其挂在灌装机的下部,然后灌装。该过程的挂袋位置,粉尘大,工作环境恶劣。而且由于为了提升灌装效率,需要人工操作速度快,跟随其挂袋速度。
3.目前采用机械挂袋方式也需要人工将袋子安放到机械手上,然后机械挂袋。依旧需要工人在现场作业。
4.如果能将吨包袋合适的卷绕,然后释放,通过机械手操作能够避免人工在现场的作业。但是吨包袋的卷绕与释放需要合适的绕绳方式,以实现吨包袋的持续释放。
5.专利名称为“吨包袋卷绕成的吨包袋卷辊及其卷绕方法”,申请号-202210044107.0为一种吨包的提绳系绳方式,在释放时通过拉紧系绳实现解开吨包袋系绳之间的连接,实现快速的吨包袋上袋操作。该种系绳方式需要在吨包袋卷绕钱阶段,通过机械装置实现系绳与吨包袋之间的连接。其中分为单绳和双绳两种系绳方法。双绳系绳方法可靠性高,单绳系绳方法速度快,节省绳索的使用。
技术实现要素:
6.本发明提供一种吨包袋提绳单绳串联系绳装置,解决吨包袋提绳使用单绳连续化系绳问题。
7.为实现上述目的,本发明采用的技术方案是:本发明吨包袋提绳单绳串联系绳装置,吨包袋设有四组提绳,提绳分处吨包袋的口部四角,包括四组系绳机构、吨包袋提绳定位机构和机架。
8.四组系绳机构对应吨包袋的四组提绳,系绳机构中包括一个旋转机械手、机械手转动驱动、伸缩机械手和空间移动机构,旋转机械手设置在机械手转动驱动上,机械手转动驱动和伸缩机械手设置在空间移动机构上,空间移动机构带动抓手机械手在立体空间内移动,机械手转动驱动带动机械手旋转,旋转机械手与伸缩机械手开启及闭合抓取吨包袋的提绳并旋转;吨包袋提绳定位机构,每个吨包袋提绳对应设有三组,三组吨包袋提绳定位机构将吨包袋的提绳定位成三角形状,且两组处于上方,一组处于下方;机架,呈框架结构,安装所述的四组系绳机构及吨包袋提绳定位机构。
9.根据所述的吨包袋提绳单绳串联系绳装置,所述吨包袋提绳定位机构包括定位板、定位伸缩柱,所述定位板竖向布置,定位伸缩柱设置在定位板上,定位伸缩柱能够突定位板或缩回与定位板齐平,吨包袋的提绳套在定位柱上。
10.根据所述的吨包袋提绳单绳串联系绳装置,还包括系绳释放机构,系绳释放机构包括绕有系绳的绳牯、引导轮和系绳限位环,绳牯、引导轮和系绳限位环安装在机架上,引
导轮为成对设置,两引导轮的中心平行,引导轮的周面设有凹槽且两引导轮的凹槽之间穿设系绳,系绳限位环处于引导轮的后方或前方,系绳从绳牯引出经系绳限位环、系绳限位环和引导轮,最后系绳处于吨包袋提绳成竖向布置的三角形的一侧,所述系绳机构处于吨包袋提绳成竖向布置的三角形的另一侧。
11.根据所述的吨包袋提绳单绳串联系绳装置,还包括系绳涨紧机构,系绳涨紧机构为悬挂在系绳上的重锤,重锤设置在水平的系绳上,重锤处于两横向高度位置的两系绳限位环之间系绳上。
12.根据所述的吨包袋提绳单绳串联系绳装置,空间移动机构为三自由度小车,包括横移机构、纵向移动机构和竖向移动机构,横移机构、纵向移动机构和竖向移动机构分别为直线驱动机构。
13.根据所述的吨包袋提绳单绳串联系绳装置,横移机构包括横移架、横移滑轨滑块和横移驱动,纵向移动机构包括纵移架、纵向轨道滚轮和纵移驱动,竖向移动机构为气缸或液压缸结构,纵向轨道滚轮中的轨道设置在机架的顶部,滚轮设置在纵向移动架的下部,横移滑轨滑块中的滑轨设置在纵向移动架上,横移滑轨滑块中的滑块设置在纵向移动架的底部。
14.根据所述的吨包袋提绳单绳串联系绳装置,机械手转动驱动旋转范围在0-270度之间。
15.根据所述的吨包袋提绳单绳串联系绳装置,其特征是,三组吨包袋提绳定位机构中下部的结构中定位伸缩柱垂注于上部的两定位伸缩柱,对应的定位板互相垂直。
16.根据所述的吨包袋提绳单绳串联系绳装置,定位伸缩柱一侧设有拨板,拨板铰接于定位板,拨板绕铰接点转动与定位伸缩柱接触,将挂在定额外伸缩柱上的吨包袋提绳限制定位。
17.本发明通过单绳将吨包袋进行连续化的系绳连接,以便于后续的卷绕作业;本发明中机械结构,采用单绳取代主绳和副绳同时作业,单绳通过控制其绳表面的摩擦力实现较小牵引力之间不会松扣;单绳仅需要一组机械手,作业效率更高。
附图说明
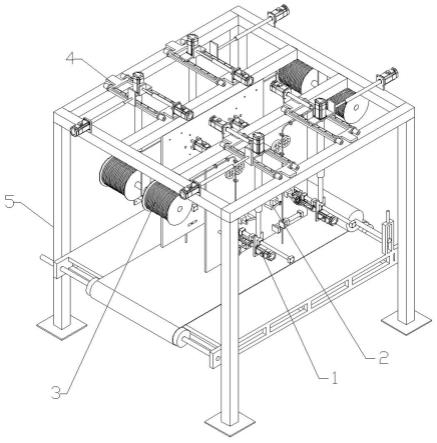
18.图1是本发明的整机结构图一,图2是本发明的整机结构图二,图3是本发明的整机的侧面视图,图4是本发明的整机的前侧面视图。
19.附图标记:1、系绳机构,11、旋转机械手,12、机械手转动驱动,13、伸缩机械手,2、吨包袋提绳定位机构,21、定位板,22、定位伸缩柱,23、拨板,3、系绳释放机构,31、绳牯,32、引导轮,33、系绳限位环,34、系绳涨紧机构,4、三自由度小车,41、横移机构,42、纵向移动机构,43、竖向移动机构,44、横移驱动,45、纵移驱动,5、机架。
具体实施方式
20.下面对本发明的具体内容进行详细的说明:
本发明吨包袋提绳单绳串联系绳装置,吨包袋设有四组提绳,提绳分处吨包袋的口部四角,通过四组系绳分别与吨包袋的四组提绳相连,多个吨包袋前后通过系绳传兰,实现吨包袋提绳单绳串联系绳,以进行后续的卷辊存储,也有利于使用上上袋灌装物料作业。
21.本发明的设有四组系绳机构1、吨包袋提绳定位机构、机架、系绳释放机构。吨包袋提绳定位机构将吨包袋的提绳撑开并定位。机系绳释放机构释放系绳在吨包袋位置,系绳机构将吨包袋与提绳系在一起,串联吨包袋。
22.机架呈框架结构,安装所述的四组系绳机构1及吨包袋提绳定位机构2。四组系绳机构1对应吨包袋的四组提绳。每组系绳机构1结果完全相同,布置上两组系绳机构1成一排,分为两排布置。
23.每个吨包袋提绳对应设有三组吨包袋提绳定位机构2,三组吨包袋提绳定位机构2将吨包袋的提绳定位成三角形状,且两组处于上方,一组处于下方;机架。吨包袋提绳定位机构2处于系绳机构1的下方,每组系绳机构1对应三组吨包袋提绳定位机构2。
24.吨包袋提绳定位机构2包括定位板21、定位伸缩柱22,所述定位板21竖向布置,定位伸缩柱22设置在定位板21上。
25.其中上部的两定位伸缩柱22能够突出定位板21或缩回与定位板21齐平,吨包袋的提绳套在定位柱上。下部的定位板为固定结构,定位伸缩柱22的前端设有挤压板对定位板接触挤压吨包袋提升的下部。
26.下部定位伸缩柱22垂注于上部的两定位伸缩柱22,对应的定位板21互相垂直。
27.上部的两定位伸缩柱22一侧设有拨板23,拨板23铰接于定位板21,拨板23绕铰接点转动与定位伸缩柱22接触,将挂在定位伸缩柱22上的吨包袋提绳限制定位。拨板23与伸缩定位柱将吨包袋提绳彻底的固定,避免其系绳时移动。
28.具体的系绳释放机构3包括绕有系绳的绳牯31、引导轮32和系绳限位环33,绳牯31、引导轮32和系绳限位环33安装在机架上,引导轮32为成对设置,两引导轮32的中心平行,引导轮32的周面设有凹槽且两引导轮32的凹槽之间穿设系绳。系绳限位环33处于引导轮32的后方以及前方,系绳从绳牯31引出经系绳限位环33、系绳限位环33、引导轮32和系绳限位环。最后系绳处于吨包袋提绳成竖向布置的三角形的一侧,所述系绳机构1处于吨包袋提绳成竖向布置的三角形的另一侧,即系绳和系绳机构1处于三角形状态的提绳两侧。
29.为了避免系绳松弛,导致系绳不能有效回缩,设置系绳涨紧机构34,系绳涨紧机构34为悬挂在系绳上的重锤,重锤设置在水平的系绳上,重锤处于两横向高度位置的两系绳限位环33之间系绳上。
30.具体的,系绳机构1中包括一个旋转机械手11、机械手转动驱动12、伸缩机械手13和空间移动机构,旋转机械手11设置在机械手转动驱动12上,机械手转动驱动12和伸缩机械手13按照上下位置设置在空间移动机构上,空间移动机构带动两在立体空间内移动,立体空间处于机架内。
31.机械手转动驱动12带动机械手旋转,旋转机械手11与伸缩机械手13开启及闭合抓取吨包袋的提绳。机械手转动驱动12旋转范围在0-270度之间。
32.具体的空间移动机构为三自由度小车4,包括横移机构41、纵向移动机构42和竖向移动机构43,横移机构41、纵向移动机构42和竖向移动机构43分别为直线驱动机构。横移机
构41包括横移架、横移滑轨滑块和横移驱动44,纵向移动机构42包括纵移架、纵向轨道滚轮和纵移驱动45,竖向移动机构43为气缸或液压缸结构,纵向轨道滚轮中的轨道设置在机架的顶部,滚轮设置在纵向移动架的下部,横移滑轨滑块中的滑轨设置在纵向移动架上,横移滑轨滑块中的滑块设置在纵向移动架的底部。空间移动机构带动系绳机构在空间内上下左右移动。
33.本发明的工作过程:先将吨包袋的提绳悬挂到吨包袋提绳定位机构2上,系绳释放机构3将系绳释放到提绳一侧,空间移动机构带动旋转机械手11穿过吨包袋提绳抓取系绳,然后移动旋转机械手11向后,带动系绳穿过吨包袋提绳的三角形并向上,系绳在提升位置向上折叠处双股,旋转旋转机械手11旋转270度,双股系绳形成环状,伸缩机械手前伸,抓取双股系绳的上部系绳,然后后缩伸缩机械手,带动系绳从双股系绳中拉出。接着系绳释放机构3回收系绳,双股系绳拉紧,完成系绳过程。将拨杆从伸缩定位柱上旋转到一侧,将吨包袋提绳释放下来,以进行下一个吨包袋的提绳定位及系绳作业。循环往复,通过一根系绳将吨包袋提绳串联起来。
34.本发明中机械结构,采用单系绳的系绳方式,通过调整系绳的表面摩擦力实现系绳的有效固定,不会拉拽中将系绳松开。单股系绳的系绳效率高,适合机器的高速作业。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
